Download as pdf or txt
You might also like
- Trajectory Modification Considering Dynamic Constraints of Autonomous RobotsDocument6 pagesTrajectory Modification Considering Dynamic Constraints of Autonomous RobotsOswin So100% (1)
- Frequently Asked Questions:: Bca Contractors Registration System (CRS)Document7 pagesFrequently Asked Questions:: Bca Contractors Registration System (CRS)Peter NgNo ratings yet
- Home Page: Online Telephone Directory BSNLDocument3 pagesHome Page: Online Telephone Directory BSNLkamini25% (4)
- Dixie General StoreDocument6 pagesDixie General StoreJoneceNo ratings yet
- Chương 06Document75 pagesChương 06Nguyễn TrườngNo ratings yet
- 080 Manipulator Trajectory PlanningDocument23 pages080 Manipulator Trajectory PlanningJohan RojasNo ratings yet
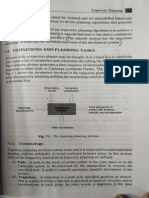
- Definitions and Planning Tasks: Tobegin With, A Trajectory Planner May Be Thought of As A Black Box To Which TheDocument7 pagesDefinitions and Planning Tasks: Tobegin With, A Trajectory Planner May Be Thought of As A Black Box To Which The20131A5327 KONDETI SHIVA NARASIMHANo ratings yet
- 08 Robotics F16MTE Path and Trajectory PlanningDocument21 pages08 Robotics F16MTE Path and Trajectory PlanningasadNo ratings yet
- Trajectory Planning: Robotics 1Document30 pagesTrajectory Planning: Robotics 1KOTIKA SOMA RAJUNo ratings yet
- Icra09 TaskSpaceTrajectoriesCubicSplineOptimizationDocument8 pagesIcra09 TaskSpaceTrajectoriesCubicSplineOptimizationsigmateNo ratings yet
- ME3209 - Topic 10 Trajectory PlanningDocument103 pagesME3209 - Topic 10 Trajectory PlanningThắng Phạm VănNo ratings yet
- Robot Path Planning: Dr. G. R. Nikhade Dept of Mech Engg, RCOEM, NagpurDocument57 pagesRobot Path Planning: Dr. G. R. Nikhade Dept of Mech Engg, RCOEM, NagpurChetan Satish PadoleNo ratings yet
- CH 4Document17 pagesCH 4ArganoNo ratings yet
- Priority Scheduling Based Dynamic Path Planning System With Motion FeedbackDocument5 pagesPriority Scheduling Based Dynamic Path Planning System With Motion FeedbackIamIam If IamNotNo ratings yet
- Autonomous Mobile Robot Navigation Algorithm For Planning Collision-Free Path Designed in Dynamic EnvironmentsDocument6 pagesAutonomous Mobile Robot Navigation Algorithm For Planning Collision-Free Path Designed in Dynamic EnvironmentskishorevennelaNo ratings yet
- Roadmap-Based Planning in Human-Robot Collaboration EnvironmentsDocument7 pagesRoadmap-Based Planning in Human-Robot Collaboration EnvironmentsZahid IqbalNo ratings yet
- 08 Trajectoryoptimization1 SlidesDocument15 pages08 Trajectoryoptimization1 SlidesBavantha UdugamaNo ratings yet
- Fluid Mechanics For Path Planning and Obstacle Avoidance of Mobile RobotsDocument8 pagesFluid Mechanics For Path Planning and Obstacle Avoidance of Mobile RobotsYogi Eka FernandesNo ratings yet
- N. A. Aspragathos and S. Foussias: Optimal Location of A Robot Path When Considering Velocity PerformanceDocument9 pagesN. A. Aspragathos and S. Foussias: Optimal Location of A Robot Path When Considering Velocity PerformanceSiddharth MurarkaNo ratings yet
- Experimental Comparison of Trajectory Tracking Algorithms For Nonholonomic Mobile RobotsDocument6 pagesExperimental Comparison of Trajectory Tracking Algorithms For Nonholonomic Mobile RobotsdhineshpNo ratings yet
- An Online Coverage Path Planning Method For Sweeper Trucks in Dynamic EnvironmentsDocument8 pagesAn Online Coverage Path Planning Method For Sweeper Trucks in Dynamic EnvironmentsBo ChenNo ratings yet
- The Inverse Solution of Dexterous Robot by Using Neural NetworksDocument11 pagesThe Inverse Solution of Dexterous Robot by Using Neural Networksbahaa03No ratings yet
- Mathematics 11 04424Document20 pagesMathematics 11 04424Daniya JNo ratings yet
- Moosavian2008 SlipDocument6 pagesMoosavian2008 SlipElias GarcíaNo ratings yet
- Optimal Path Planning For Mobile Robot Navigation: Gene Eu Jan, Ki Yin Chang, and Ian ParberryDocument10 pagesOptimal Path Planning For Mobile Robot Navigation: Gene Eu Jan, Ki Yin Chang, and Ian Parberrysaeed khodayganNo ratings yet
- Motion Tasks For Robot Manipulators On Embedded 2-D Manifolds Under Input ConstraintsDocument7 pagesMotion Tasks For Robot Manipulators On Embedded 2-D Manifolds Under Input Constraintshuynh nguyen dinhNo ratings yet
- Vector Field Following For Quadrotors Using Differential FlatnessDocument6 pagesVector Field Following For Quadrotors Using Differential FlatnesswendersoncsdepNo ratings yet
- Constant Kinetic Energy Robot Trajectory PlanningDocument16 pagesConstant Kinetic Energy Robot Trajectory PlanningstaktikaNo ratings yet
- What Is A Parallel RobotDocument46 pagesWhat Is A Parallel Robotminh_bk0101No ratings yet
- Robot Path Planning For Maze NavigationDocument5 pagesRobot Path Planning For Maze NavigationAbhishek KulkarniNo ratings yet
- Trajectory Planning Trajectory Planning - 1 1: Basilio Bona Robotica 03cfior 1Document54 pagesTrajectory Planning Trajectory Planning - 1 1: Basilio Bona Robotica 03cfior 1Fabio De MarcoNo ratings yet
- Unicycle Model and ControlDocument27 pagesUnicycle Model and ControlmatteoragniNo ratings yet
- Cartesian Nonlinear Model Predictive Control of Redundant Manipulators Considering ObstaclesDocument6 pagesCartesian Nonlinear Model Predictive Control of Redundant Manipulators Considering ObstaclesSHISHIR CHANDRA DAS 1809019No ratings yet
- Trajectory Planning - MelchiorriDocument140 pagesTrajectory Planning - MelchiorrirrqNo ratings yet
- Advanced Techniques of Industrial Robot Programming 79Document21 pagesAdvanced Techniques of Industrial Robot Programming 79Pablo HernandezNo ratings yet
- Robotics Assignment Bicycle Model Controller and Path FollowingDocument2 pagesRobotics Assignment Bicycle Model Controller and Path Followingdsuyash57No ratings yet
- Howard Thomas 2007 1Document20 pagesHoward Thomas 2007 1Suresh KumarNo ratings yet
- Interpolation Method For Robot Trajectory Planning: Martin Svejda, Tom A S CechuraDocument6 pagesInterpolation Method For Robot Trajectory Planning: Martin Svejda, Tom A S CechuraИгорь БезукладниковNo ratings yet
- Computational Time Reduction in Stream Field Navigation Through Dyna 2022 ArDocument8 pagesComputational Time Reduction in Stream Field Navigation Through Dyna 2022 ArMetro Electronics ScaleNo ratings yet
- Trajectory Planning Notes (Robotics)Document21 pagesTrajectory Planning Notes (Robotics)shreedharkolekar100% (2)
- 5.movement Optimization of Robotic Arms For EnergyDocument4 pages5.movement Optimization of Robotic Arms For Energyrajmeet singhNo ratings yet
- 19EE5803 UNIT-4 Path Planning: Prepared by S.ChithraDocument49 pages19EE5803 UNIT-4 Path Planning: Prepared by S.ChithraTizon Star100% (1)
- Fully-Pipelined CORDIC-based FPGA Realization For A 3-DOF Hexapod-Leg Inverse Kinematics CalculationDocument6 pagesFully-Pipelined CORDIC-based FPGA Realization For A 3-DOF Hexapod-Leg Inverse Kinematics CalculationErick RodriguezNo ratings yet
- Principles of Robot Autonomy I: Trajectory Tracking and Closed-Loop ControlDocument18 pagesPrinciples of Robot Autonomy I: Trajectory Tracking and Closed-Loop ControlratjerryNo ratings yet
- Using PSO 2Document6 pagesUsing PSO 2smkumaran90No ratings yet
- 82 Part2 TrajectoryGenerationDocument52 pages82 Part2 TrajectoryGenerationXuân HoằngNo ratings yet
- RoboticsDocument32 pagesRoboticsAsh5367No ratings yet
- Point-to-Point Trajectory Generation Under Joint Constraints For Industrial RobotsDocument9 pagesPoint-to-Point Trajectory Generation Under Joint Constraints For Industrial RobotsInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Time Minimum Trajectory Planning of A 2-DOF Translational Parallel Robot For Pick-And-Place OperationsDocument4 pagesTime Minimum Trajectory Planning of A 2-DOF Translational Parallel Robot For Pick-And-Place OperationsjeevaNo ratings yet
- Entrenamiento de CarroDocument6 pagesEntrenamiento de CarroGerman CamposNo ratings yet
- Minimum-Time Trajectory Planning and Control of A Pick-and-Place Five-Bar Parallel RobotDocument10 pagesMinimum-Time Trajectory Planning and Control of A Pick-and-Place Five-Bar Parallel Robotibrahimgulay15No ratings yet
- Isise 2012 59Document4 pagesIsise 2012 59Duy KhổngNo ratings yet
- Multi-UAV Path Planning in Obstacle Rich Environments Using Rapidly-Exploring Random TreesDocument6 pagesMulti-UAV Path Planning in Obstacle Rich Environments Using Rapidly-Exploring Random Treesmarion.martin031995No ratings yet
- Research Collection: Continuous-Time Trajectory Optimization For Online UAV ReplanningDocument9 pagesResearch Collection: Continuous-Time Trajectory Optimization For Online UAV ReplanningЄвген ВознюкNo ratings yet
- Exact Cell Decomposition of Arrangements Used For Path Planning in RoboticsDocument14 pagesExact Cell Decomposition of Arrangements Used For Path Planning in RoboticsAli BabarNo ratings yet
- An Overview-Mobile Robot Path Planning NCETEMT-2021 - Paper - 152Document4 pagesAn Overview-Mobile Robot Path Planning NCETEMT-2021 - Paper - 152Vesag nNo ratings yet
- Sampling Based Robot Motion Planning: Dept. of Ece, Bgsit 2015page 1Document20 pagesSampling Based Robot Motion Planning: Dept. of Ece, Bgsit 2015page 1punithNo ratings yet
- A Study On Tangent Bug AlgorithmDocument3 pagesA Study On Tangent Bug AlgorithmkfuScribdNo ratings yet
- Fully-Pipeline CORDIC-based FPGA Realization For A 3-DOF Hexapod-Leg Inverse Kinematics CalculationDocument6 pagesFully-Pipeline CORDIC-based FPGA Realization For A 3-DOF Hexapod-Leg Inverse Kinematics CalculationErick RodriguezNo ratings yet
- Kim 1985Document11 pagesKim 1985Trịnh Đàm NhânNo ratings yet
- ANZT11 EtfaDocument7 pagesANZT11 EtfaJohn ArvanitakisNo ratings yet
- Trajectory Planning For Robot ManipulatorsDocument61 pagesTrajectory Planning For Robot ManipulatorsJasón De EleaNo ratings yet
- Scanline Rendering: Exploring Visual Realism Through Scanline Rendering TechniquesFrom EverandScanline Rendering: Exploring Visual Realism Through Scanline Rendering TechniquesNo ratings yet
- Projects Presentation 2020Document44 pagesProjects Presentation 2020baboiu electricNo ratings yet
- Intro2Robotics Sample QuestionsDocument3 pagesIntro2Robotics Sample Questionsbaboiu electricNo ratings yet
- Academic Calendar 2019 2020Document1 pageAcademic Calendar 2019 2020baboiu electricNo ratings yet
- 09 C 42334 Before DeleteDocument4 pages09 C 42334 Before Deletebaboiu electricNo ratings yet
- Tyre Load Speed IndexDocument1 pageTyre Load Speed Indexbaboiu electricNo ratings yet
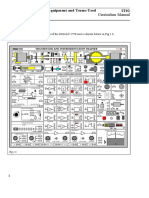
- Basic Control Systems Equipment and Terms Used IT02 Curriculum ManualDocument1 pageBasic Control Systems Equipment and Terms Used IT02 Curriculum Manualbaboiu electricNo ratings yet
- CLEPA Proposed Amendments Highlight in Yellow (Bold or Lined Through) With Justification in Text, 02-12-2010Document31 pagesCLEPA Proposed Amendments Highlight in Yellow (Bold or Lined Through) With Justification in Text, 02-12-2010baboiu electricNo ratings yet
- Further ElectropneumaticsDocument5 pagesFurther Electropneumaticsbaboiu electricNo ratings yet
- Valves and Unit Injectors AdjustmentDocument19 pagesValves and Unit Injectors Adjustmentbaboiu electricNo ratings yet
- Nagunni 1Document2 pagesNagunni 1mayank.sharmaNo ratings yet
- Semantics. Abnormality in Syntagmatic Relations. 3 December 2020Document21 pagesSemantics. Abnormality in Syntagmatic Relations. 3 December 2020Marina TanovićNo ratings yet
- Zaiter Alejandra - Career PresentationsDocument18 pagesZaiter Alejandra - Career Presentationsapi-408086087No ratings yet
- Reinvent Your Business ModelDocument26 pagesReinvent Your Business Modelvargasjunior65100% (1)
- Energy Efficiency Frameworks A Literature OverviewDocument10 pagesEnergy Efficiency Frameworks A Literature OverviewM VlogNo ratings yet
- ICTDocument4 pagesICTqwertyNo ratings yet
- Doctype HTMLDocument30 pagesDoctype HTMLAndreiNo ratings yet
- Cookie Business PlanDocument27 pagesCookie Business PlanLiza Mhey AcedoNo ratings yet
- Affirmation PowerDocument39 pagesAffirmation PowerIman Jaya100% (2)
- Skjaervo Enc Ir KAYĀNIĀNDocument72 pagesSkjaervo Enc Ir KAYĀNIĀNTataritosNo ratings yet
- OSI Layer & TCP Protocols - PostQuiz - Attempt ReviewDocument4 pagesOSI Layer & TCP Protocols - PostQuiz - Attempt Reviewvinay Murakambattu100% (1)
- Interview Questions - The Dirty DozenDocument5 pagesInterview Questions - The Dirty DozenHimanshu PantNo ratings yet
- Falta DatabaseDocument72 pagesFalta DatabaseTENDER AWADH GROUPNo ratings yet
- Nursing Care Plan: HyperbilirubinemiaDocument5 pagesNursing Care Plan: HyperbilirubinemiaJanelle Gift SenarloNo ratings yet
- South Sudan Early Recovery and Humanitarian Project (Sserhp)Document57 pagesSouth Sudan Early Recovery and Humanitarian Project (Sserhp)kashiNo ratings yet
- 3rd PE SUMMATIVE1Document2 pages3rd PE SUMMATIVE1NoreL Jan PinedaNo ratings yet
- RTK Service Installation GuideDocument23 pagesRTK Service Installation GuideMagdiel Omar Zavala GutierrezNo ratings yet
- Best Spy App For Android & IOS 2021Document1 pageBest Spy App For Android & IOS 2021gooshitarh spy24No ratings yet
- How Payal Kadakia Danced Her Way To A $600 Million Start-Up - The New York TimesDocument4 pagesHow Payal Kadakia Danced Her Way To A $600 Million Start-Up - The New York TimesRadhika SwaroopNo ratings yet
- 2005 Nicolet National Bank Annual ReportDocument16 pages2005 Nicolet National Bank Annual ReportNicolet BankNo ratings yet
- Ace TechniqueDocument1 pageAce TechniqueXiid DNo ratings yet
- Megillah 3Document70 pagesMegillah 3Julian Ungar-SargonNo ratings yet
- Asia Bibi Blasphemy CaseDocument14 pagesAsia Bibi Blasphemy CaseRadovan SpiridonovNo ratings yet
- BI Form 2 KERTAS 1 pp2Document12 pagesBI Form 2 KERTAS 1 pp2Muhammad FaizNo ratings yet
- Jara, John Leoj I. Prof - Dioshua Sapla Plate 1: Ground Floor Plan Second Floor PlanDocument1 pageJara, John Leoj I. Prof - Dioshua Sapla Plate 1: Ground Floor Plan Second Floor PlanWynne TillasNo ratings yet
- Application Form: Personal Secondary EducationDocument3 pagesApplication Form: Personal Secondary EducationRed PalustreNo ratings yet
- Hill, Therapist Techniques, Client Involvement, and The Therapeutic Relationship, (Hill, 2005)Document12 pagesHill, Therapist Techniques, Client Involvement, and The Therapeutic Relationship, (Hill, 2005)Osman CastroNo ratings yet