Download as pdf or txt
You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5825)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1093)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (852)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (590)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (903)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (541)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (349)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (823)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (403)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- 2008 Nissan Teana J32 Service Manual-ECDocument414 pages2008 Nissan Teana J32 Service Manual-ECMrihex100% (3)
- JMFDocument1 pageJMFElmo CharlesNo ratings yet
- Example 2.5: Figure 2.3: Concatenation of StringsDocument1 pageExample 2.5: Figure 2.3: Concatenation of StringsElmo CharlesNo ratings yet
- Using Message Box and Input Box: 3.1 The Msgbox FunctionDocument1 pageUsing Message Box and Input Box: 3.1 The Msgbox FunctionElmo CharlesNo ratings yet
- General Definitions: I I R L V I L IDocument1 pageGeneral Definitions: I I R L V I L IElmo CharlesNo ratings yet
- In Terms of The Known Angles) S P and BDocument1 pageIn Terms of The Known Angles) S P and BElmo CharlesNo ratings yet
- Table 3.2: Returned Values and Command ButtonsDocument1 pageTable 3.2: Returned Values and Command ButtonsElmo CharlesNo ratings yet
- Table 2.3: Arithmetic Operators Operator Mathematical Function ExampleDocument1 pageTable 2.3: Arithmetic Operators Operator Mathematical Function ExampleElmo CharlesNo ratings yet
- Table 3.1: Style Values and Command Buttons Style Value Named Constant Button DisplayedDocument1 pageTable 3.1: Style Values and Command Buttons Style Value Named Constant Button DisplayedElmo CharlesNo ratings yet
- Civilengenhandbook 440Document1 pageCivilengenhandbook 440Elmo CharlesNo ratings yet
- Global Claims: SCL Delay and Disruption Protocol 2 Edition: February 2017 8Document1 pageGlobal Claims: SCL Delay and Disruption Protocol 2 Edition: February 2017 8Elmo CharlesNo ratings yet
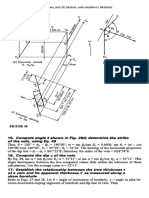
- (D) Plan Plan (B) Elevation Normal Toh H: 15. Compute Angle O Shown in Fig. 2Bd Determine The StrikeDocument1 page(D) Plan Plan (B) Elevation Normal Toh H: 15. Compute Angle O Shown in Fig. 2Bd Determine The StrikeElmo CharlesNo ratings yet
- A Preliminaries/Genera Conditions: Information Provided Measurement Rules Rules CoverageDocument1 pageA Preliminaries/Genera Conditions: Information Provided Measurement Rules Rules CoverageElmo CharlesNo ratings yet
- Of The Intersection Points and Point G: H H F FDocument1 pageOf The Intersection Points and Point G: H H F FElmo CharlesNo ratings yet
- Procedure For Granting EOT: SCL Delay and Disruption Protocol 2 Edition: February 2017 6Document1 pageProcedure For Granting EOT: SCL Delay and Disruption Protocol 2 Edition: February 2017 6Elmo CharlesNo ratings yet
- Guidance Part A: Delay, Disruption and Acceleration ConceptsDocument1 pageGuidance Part A: Delay, Disruption and Acceleration ConceptsElmo CharlesNo ratings yet
- Core Principles: 1. Programme and RecordsDocument1 pageCore Principles: 1. Programme and RecordsElmo CharlesNo ratings yet
- SMM7 23Document1 pageSMM7 23Elmo CharlesNo ratings yet
- Preliminaries/General Conditions: A ContinuedDocument1 pagePreliminaries/General Conditions: A ContinuedElmo CharlesNo ratings yet
- SCL Delay and Disruption Protocol 2 Edition: February 2017 7Document1 pageSCL Delay and Disruption Protocol 2 Edition: February 2017 7Elmo CharlesNo ratings yet
- SMM7 21Document1 pageSMM7 21Elmo CharlesNo ratings yet
- Recommended Criteria For Single Samples: Table 1 Table 1Document1 pageRecommended Criteria For Single Samples: Table 1 Table 1Elmo CharlesNo ratings yet
- Pre I Aries/ Ene Al Itions Co N Ed: 3 Lo e S Q I Eme TS: Pec L Itations T Od/se Uence/t I G/ SeDocument1 pagePre I Aries/ Ene Al Itions Co N Ed: 3 Lo e S Q I Eme TS: Pec L Itations T Od/se Uence/t I G/ SeElmo CharlesNo ratings yet
- 2020-04-Lockdown-Rollback-Checklist-Research-Note 3Document1 page2020-04-Lockdown-Rollback-Checklist-Research-Note 3Elmo CharlesNo ratings yet
- 2020-04-Lockdown-Rollback-Checklist-Research-Note 4Document1 page2020-04-Lockdown-Rollback-Checklist-Research-Note 4Elmo CharlesNo ratings yet
- 2020-04-Lockdown-Rollback-Checklist-Research-Note 2Document1 page2020-04-Lockdown-Rollback-Checklist-Research-Note 2Elmo CharlesNo ratings yet
- 2020-04-Lockdown-Rollback-Checklist-Research-Note 1Document1 page2020-04-Lockdown-Rollback-Checklist-Research-Note 1Elmo CharlesNo ratings yet
- 1.3.1 General AASHTO LRFD Design EquationDocument1 page1.3.1 General AASHTO LRFD Design EquationElmo CharlesNo ratings yet
- Nice Classification - 11 Edition, Version 2017Document1 pageNice Classification - 11 Edition, Version 2017Elmo CharlesNo ratings yet
- VMA in HMADocument1 pageVMA in HMAElmo CharlesNo ratings yet
- Truck LoadingDocument1 pageTruck LoadingElmo CharlesNo ratings yet
- Eastern Shipping v. Intermediate Appellate CourtDocument2 pagesEastern Shipping v. Intermediate Appellate CourtNoreenesse SantosNo ratings yet
- Book of Program 3rd - Icpeu 2017Document325 pagesBook of Program 3rd - Icpeu 2017Efrizal RahmanNo ratings yet
- 12660/GURUDEV EXP Sleeper Class (SL) : WL WLDocument2 pages12660/GURUDEV EXP Sleeper Class (SL) : WL WLMallikharjuna Chowdary SoloNo ratings yet
- Standards INDEXDocument8 pagesStandards INDEXZohair AftabNo ratings yet
- BANWASDocument5 pagesBANWASsureen123No ratings yet
- Chapter 6-Structural Design of PavementsDocument36 pagesChapter 6-Structural Design of Pavementsabebe nanoNo ratings yet
- Noise in High Rise Buildings: Ross H. Palmer Cpeng Rpeq Principal Palmer Acoustics (Australia) Pty LTDDocument9 pagesNoise in High Rise Buildings: Ross H. Palmer Cpeng Rpeq Principal Palmer Acoustics (Australia) Pty LTDzaheeruddin_mohdNo ratings yet
- Regulation - 1031 - OHS - General Safety RegulationsDocument24 pagesRegulation - 1031 - OHS - General Safety Regulationsmubeenhassim100% (1)
- Cambridge IGCSE: Global Perspectives 0457/12Document4 pagesCambridge IGCSE: Global Perspectives 0457/12Akoh Nixon AkohNo ratings yet
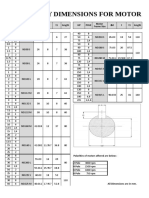
- Standard Key Dimensions For Motor: HP Pole Ød T t1 Length HP Pole Ød T t1 Length Motor Frame Size Motor Frame SizeDocument7 pagesStandard Key Dimensions For Motor: HP Pole Ød T t1 Length HP Pole Ød T t1 Length Motor Frame Size Motor Frame Sizeketan mehtaNo ratings yet
- Bajo Perfil Cat Ad55 SpecDocument1 pageBajo Perfil Cat Ad55 SpecMARIO DEL PINO MUÑOZNo ratings yet
- Directory3 1 PDFDocument307 pagesDirectory3 1 PDFFazila KhanNo ratings yet
- The SmartDocument29 pagesThe SmartChin Ting Xuan CrystalNo ratings yet
- ECOTRIC - FAT20850C-v5 and FAT2085C-RD-xxxDocument28 pagesECOTRIC - FAT20850C-v5 and FAT2085C-RD-xxxPhuongNo ratings yet
- Work Zone Employee Safety: Internal Traffic Control PlansDocument68 pagesWork Zone Employee Safety: Internal Traffic Control PlansSijo RajanNo ratings yet
- AHM565 Turkish Airlines - A320-232Document46 pagesAHM565 Turkish Airlines - A320-232Nguyen Duc BinhNo ratings yet
- Fuzzytech Crane SimulationDocument27 pagesFuzzytech Crane SimulationMomi Tza100% (1)
- Brakes and ClutchesDocument20 pagesBrakes and ClutchesHuzaifa YousafNo ratings yet
- Law ICADocument18 pagesLaw ICAapi-19970189No ratings yet
- C1803 04 PDFDocument3 pagesC1803 04 PDFMaiChiVuNo ratings yet
- Police Log January 15, 2016Document15 pagesPolice Log January 15, 2016MansfieldMAPoliceNo ratings yet
- BS EN 50526-1-2012 D.C. Surge Arresters and Voltage Limiting Devices Part 1 Surge ArresterDocument44 pagesBS EN 50526-1-2012 D.C. Surge Arresters and Voltage Limiting Devices Part 1 Surge ArresterRigs KoNo ratings yet
- BoardingCard 220020803 LPL OTP PDFDocument1 pageBoardingCard 220020803 LPL OTP PDFValentin AlexandruNo ratings yet
- Shipping & Delivery PDFDocument14 pagesShipping & Delivery PDFDozami MarketingNo ratings yet
- BM Assignment Brand Extensions Royal Enfield SectionC Group15Document12 pagesBM Assignment Brand Extensions Royal Enfield SectionC Group15Nitesh KumarNo ratings yet
- Lista MarussiDocument8 pagesLista MarussijouhannavarroNo ratings yet
- Death March Kara Hajimaru Isekai Kyusoukyoku Book 07 - Volume 07Document491 pagesDeath March Kara Hajimaru Isekai Kyusoukyoku Book 07 - Volume 07Ale DragutNo ratings yet
- NCAA Paper 1Document9 pagesNCAA Paper 1Chisom Caleb NwekeNo ratings yet
- Trolley Weight EstimationDocument7 pagesTrolley Weight EstimationRaj KumarNo ratings yet