Download as pdf or txt
You might also like
- Axd TimingDocument7 pagesAxd Timingdocrobb_100% (1)
- Perkins 6.3544 and T6.3544 Diesel EnginesDocument40 pagesPerkins 6.3544 and T6.3544 Diesel EnginesArmando Orta75% (4)
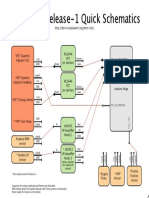
- DMN-EDC Release-1 Quick Schematics: GND +12v Drain Source GateDocument1 pageDMN-EDC Release-1 Quick Schematics: GND +12v Drain Source GateX'mix Đreamer100% (1)
- CTC-223 Basic EngineDocument97 pagesCTC-223 Basic EngineArabyAbdel Hamed Sadek100% (1)
- FUNK Transmission PDFDocument241 pagesFUNK Transmission PDFfelipe macias100% (4)
- Governor WSIEG1Document1 pageGovernor WSIEG1jorjijonNo ratings yet
- TCD 045 Di4Document1 pageTCD 045 Di4Ace Noah SomintacNo ratings yet
- EE210 S22 LecSlides 07 2ppDocument14 pagesEE210 S22 LecSlides 07 2ppMarcel HuberNo ratings yet
- Assignment ELE8331 Submit by 4 August, 2021: Consider Fig. Q1Gen Shows ADocument8 pagesAssignment ELE8331 Submit by 4 August, 2021: Consider Fig. Q1Gen Shows Aumarsabo100% (1)
- TCD 043 Di4Document1 pageTCD 043 Di4Ace Noah SomintacNo ratings yet
- 09 FNG31 Charging in Flexi NGDocument63 pages09 FNG31 Charging in Flexi NGapppurchaseNo ratings yet
- PDFDocument52 pagesPDFHuy Khôi HàNo ratings yet
- Ramesh 2021Document23 pagesRamesh 2021garima pariyaniNo ratings yet
- Francis Turbine and Governor Improved Models Considering Step Closing Law of Guide Vanes For Power System Stability AnalysisDocument7 pagesFrancis Turbine and Governor Improved Models Considering Step Closing Law of Guide Vanes For Power System Stability AnalysisParantap RahaNo ratings yet
- Governor IEEEG1 and IEEEG1 - GEDocument1 pageGovernor IEEEG1 and IEEEG1 - GERoberto ZuñigaNo ratings yet
- Modelos AVRs GOVs - Parte18Document10 pagesModelos AVRs GOVs - Parte18Torres JohnNo ratings yet
- Governor BPA GHDocument1 pageGovernor BPA GHhmadufps1408No ratings yet
- HPS128-LT-S - Hybrid Pyroelectric Linear Array With 128 Responsive Elements and Integrated CMOS MultiplexerDocument5 pagesHPS128-LT-S - Hybrid Pyroelectric Linear Array With 128 Responsive Elements and Integrated CMOS MultiplexercindyelNo ratings yet
- Flyback Behnam 92 2 15Document131 pagesFlyback Behnam 92 2 15behzad1031No ratings yet
- Acer Aspire E5 574 E5 574G E5 574TDocument48 pagesAcer Aspire E5 574 E5 574G E5 574TRodrigo Guedes100% (1)
- Analog Electronics: February 5, 2020Document9 pagesAnalog Electronics: February 5, 2020Parman SinghNo ratings yet
- Lab 02Document2 pagesLab 02О' ЛхагвадуламNo ratings yet
- C6-Feedback Control Analysis-ENDocument29 pagesC6-Feedback Control Analysis-ENchâu nguyễn ngọcNo ratings yet
- That - DN140 (Verschoben) 9 PDFDocument1 pageThat - DN140 (Verschoben) 9 PDFsdtrnkNo ratings yet
- Lec 4 BDocument2 pagesLec 4 Bspeedaswin100% (1)
- Switch Amplifier KFD2-ST2-Ex1.LB: FunctionDocument5 pagesSwitch Amplifier KFD2-ST2-Ex1.LB: Functionk ONo ratings yet
- Combined Model of LFC and Voltage Control in Matla SoftwareDocument12 pagesCombined Model of LFC and Voltage Control in Matla SoftwareMahmudul BappiNo ratings yet
- Assignment ON Ele8331 (Power System Control) : General QuestionDocument12 pagesAssignment ON Ele8331 (Power System Control) : General QuestionumarsaboNo ratings yet
- BH 1415 SFDocument15 pagesBH 1415 SFEmilio EscalanteNo ratings yet
- Acer+E5 574+Quanta+ZRWDocument48 pagesAcer+E5 574+Quanta+ZRWnelsonNo ratings yet
- 1.3grammar REVDocument26 pages1.3grammar REVAbrham AschaleNo ratings yet
- Catalog NDC1 SeriesDocument6 pagesCatalog NDC1 Seriesroly denis huaman cusiNo ratings yet
- D117/D118 Point To Point Diagram: Controller BoardDocument9 pagesD117/D118 Point To Point Diagram: Controller BoardOcean PrintNo ratings yet
- L9-1 PidDocument14 pagesL9-1 PidTrần Kế HưngNo ratings yet
- Back To Back Cable (Point To Point)Document1 pageBack To Back Cable (Point To Point)Ahmed IsmailNo ratings yet
- 004552b CPMODocument1 page004552b CPMOmarkoNo ratings yet
- Universal Temperature Converter KFD2-UT2-2: FunctionDocument4 pagesUniversal Temperature Converter KFD2-UT2-2: FunctionAlamsyah SyamsuddinNo ratings yet
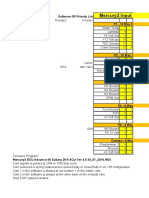
- Mercury2 Input / Outputs: Saftware GP Priority List P1 - 12 Way InputDocument2 pagesMercury2 Input / Outputs: Saftware GP Priority List P1 - 12 Way InputFluke RanzaNo ratings yet
- 1C 16SQMM CU Cable AJB: Internet ConnectionDocument1 page1C 16SQMM CU Cable AJB: Internet ConnectionShivi AroraNo ratings yet
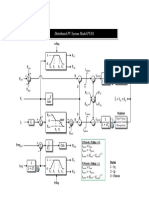
- Machine Model PVD1Document1 pageMachine Model PVD1ManuelNo ratings yet
- Supp M117.792077 Supp DataDocument10 pagesSupp M117.792077 Supp DataSubhajit DuttaNo ratings yet
- WDu-MVS-Model Benchmarking REGFM - A1 Model - May 2023Document32 pagesWDu-MVS-Model Benchmarking REGFM - A1 Model - May 2023p61466365No ratings yet
- EE316 ReceiverDocument1 pageEE316 ReceiverŞamil ŞirinNo ratings yet
- A4 SC hc39p K.FMDocument11 pagesA4 SC hc39p K.FMRobert CarNo ratings yet
- Feedback Control StrategiesDocument118 pagesFeedback Control StrategiesShlok MishraNo ratings yet
- (3.6.850) Robust PID Controller Design For Disturbance Rejection of Complex Time Delay ProcessesDocument7 pages(3.6.850) Robust PID Controller Design For Disturbance Rejection of Complex Time Delay ProcessesShamsMohdNo ratings yet
- Power OneDocument4 pagesPower OneMark WrightNo ratings yet
- Machine Model DER - ADocument3 pagesMachine Model DER - AManuelNo ratings yet
- Ports and Pins MapDocument1 pagePorts and Pins Mapnorbert.rendesNo ratings yet
- Datasheet PKDO1FPDocument18 pagesDatasheet PKDO1FPIvanBernalNo ratings yet
- 1.2.4 New Developments in MOSFET and IGBT TechnologyDocument6 pages1.2.4 New Developments in MOSFET and IGBT Technologyjorge armando vega prietoNo ratings yet
- Driver 22arDocument1 pageDriver 22arDiego AbarcaNo ratings yet
- Fs6S-Series: FS6S0965R/FS6S0965RT/FS6S1265R/FS6S15658RDocument16 pagesFs6S-Series: FS6S0965R/FS6S0965RT/FS6S1265R/FS6S15658RSantz TechNo ratings yet
- SG3526Document11 pagesSG3526RocioLLactaMartinezNo ratings yet
- Equations and ConstantsDocument1 pageEquations and ConstantsAbdalla ShaoebNo ratings yet
- 13 Hilux: Back-Up LightDocument1 page13 Hilux: Back-Up LightautocomtrucksNo ratings yet
- APM2054N: Pin Description FeaturesDocument12 pagesAPM2054N: Pin Description FeaturespotatoNo ratings yet
- Dc920a SCHDocument1 pageDc920a SCHbruno magalhãesNo ratings yet
- Gas Dynamics-Rayleigh FlowDocument26 pagesGas Dynamics-Rayleigh FlowRahul100% (4)
- Motor SincronoDocument1 pageMotor Sincronosamuel sedanoNo ratings yet
- UNIFI Generic Virtual Synchronous Machine Grid-Forming Inverter Model Specification-V12Document9 pagesUNIFI Generic Virtual Synchronous Machine Grid-Forming Inverter Model Specification-V12p61466365No ratings yet
- TRANS-MidiAMF ENG SHORT V02 PDFDocument26 pagesTRANS-MidiAMF ENG SHORT V02 PDFMarco Pilaguano LogañaNo ratings yet
- Ampiezza Modulo 2 Q, Qbar in GGDocument6 pagesAmpiezza Modulo 2 Q, Qbar in GGclaudio.maisano12No ratings yet
- D6K Track AdjustDocument7 pagesD6K Track AdjustPyae Phyoe AungNo ratings yet
- INYECCION IAW048 - 01 eSPICIFICACIONES Y SECRETOS ECUDocument5 pagesINYECCION IAW048 - 01 eSPICIFICACIONES Y SECRETOS ECUmaxi martinezNo ratings yet
- Case Cx460 Tier3 Crawler Excavator Shop ManualDocument20 pagesCase Cx460 Tier3 Crawler Excavator Shop Manualedward100% (56)
- Check ValvesDocument1 pageCheck ValvesZohaib MaqboolNo ratings yet
- C-15 Schematic - SENR9575 - 01Document2 pagesC-15 Schematic - SENR9575 - 01mohammad hazbehzadNo ratings yet
- SHD 250Document18 pagesSHD 250api-233322200100% (1)
- NTB T282C T Us 07 12863-0Document22 pagesNTB T282C T Us 07 12863-0Pepe Del Campo100% (1)
- Beta Oil Injection GuideDocument18 pagesBeta Oil Injection GuidetrialnaqueraNo ratings yet
- Sparepart Order: Engine KOMATSU SAA12V140-P1150 Unit No. # 8 Grup Part Name No Material Parts Number Unit QtyDocument3 pagesSparepart Order: Engine KOMATSU SAA12V140-P1150 Unit No. # 8 Grup Part Name No Material Parts Number Unit QtyAnom Harimurti100% (1)
- Bearing and Linear Replacement Guide WebDocument300 pagesBearing and Linear Replacement Guide WebAdam StroufNo ratings yet
- Forklift GuideDocument142 pagesForklift GuideYeison Leon Durango CastañedaNo ratings yet
- Diag Gen 3500BDocument2 pagesDiag Gen 3500BEdison ChicaizaNo ratings yet
- Brochure Mixer DBX 35Document2 pagesBrochure Mixer DBX 35Khoa NguyenNo ratings yet
- Electric DrivesDocument91 pagesElectric DrivesS.m. FerdousNo ratings yet
- Residence Distribution Box Size Calculation (14.1.14)Document13 pagesResidence Distribution Box Size Calculation (14.1.14)south adventureNo ratings yet
- Ampacity of Copper Conductors Including Wire in RacewayDocument2 pagesAmpacity of Copper Conductors Including Wire in RacewayTenda Kyojin0% (1)
- 962G LoaderDocument2 pages962G LoaderMohamed SaiedNo ratings yet
- Automatic Spring Rolling MachineDocument14 pagesAutomatic Spring Rolling MachineJilly Arasu100% (1)
- Activity #4 Hans Christian Corteza BSAT-3A Heavy Equipment and Farm Machineries Crane 1. Functions/ UseDocument8 pagesActivity #4 Hans Christian Corteza BSAT-3A Heavy Equipment and Farm Machineries Crane 1. Functions/ UseJohnzzkiiee 29No ratings yet
- Diagnostic Codes: Dépistage Des PannesDocument3 pagesDiagnostic Codes: Dépistage Des PannesMahaman kabirouNo ratings yet
- Santafe 2.7L 2008Document1,326 pagesSantafe 2.7L 2008Joe TateauNo ratings yet
- 2015 12 GETRAG Lecture Modular Hybrid Transmission KitDocument25 pages2015 12 GETRAG Lecture Modular Hybrid Transmission Kitputex247No ratings yet
- Continental GT PDFDocument122 pagesContinental GT PDFMišel VasićNo ratings yet
- 5303 - 5403 Ind.Document308 pages5303 - 5403 Ind.Edinaldo GuimaraesNo ratings yet
- Vertical Turning and Boring MachineDocument5 pagesVertical Turning and Boring MachineShahbaz AlamNo ratings yet
- 79-20-00 - Oil Distribution - Description and OperationDocument3 pages79-20-00 - Oil Distribution - Description and OperationCleber SouzaNo ratings yet