Download as pdf or txt
You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5820)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1093)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (852)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (590)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (898)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (540)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (349)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (822)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (403)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Payal Ghose and Aparna Raja, Changing Dynamics of Debt Funding in India, Economic Research and Surveillance Department, CCILDocument3 pagesPayal Ghose and Aparna Raja, Changing Dynamics of Debt Funding in India, Economic Research and Surveillance Department, CCILKunwar AbhudayNo ratings yet
- Responsibility CentersDocument33 pagesResponsibility Centersritesh2030No ratings yet
- HARD ROCK COMPANY Statement of Financial PositionDocument3 pagesHARD ROCK COMPANY Statement of Financial PositionJade Lykarose Ochavillo GalendoNo ratings yet
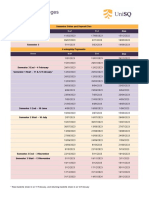
- Schedule of Fees 2023Document1 pageSchedule of Fees 2023AhsanNo ratings yet
- Dsadsadd Sadad SDocument3 pagesDsadsadd Sadad SRidwan47No ratings yet
- Risk Management Guidelines For MalawiDocument87 pagesRisk Management Guidelines For MalawiMwawiNo ratings yet
- Emtek LK TW III 2022Document202 pagesEmtek LK TW III 2022Daniel Pandapotan MarpaungNo ratings yet
- BHM 724 Financial Accounting - NOUNDocument144 pagesBHM 724 Financial Accounting - NOUNAnonymous Th1S33No ratings yet
- NBP Funds: NBP Aitemaad Mahana Amdani Fund (NAMAF)Document1 pageNBP Funds: NBP Aitemaad Mahana Amdani Fund (NAMAF)Sajid rasoolNo ratings yet
- Worksheet Eco BanksDocument3 pagesWorksheet Eco BanksAryan KalthiaNo ratings yet
- IRDA Mock Test 5Document13 pagesIRDA Mock Test 5psNo ratings yet
- Local Budget Circular: Republic OF THE Philippines / Department OF Budget AND ManagemenDocument41 pagesLocal Budget Circular: Republic OF THE Philippines / Department OF Budget AND ManagemenDILG IV-A PDMUNo ratings yet
- Contributions of Fidel VDocument11 pagesContributions of Fidel VArdee Marius GuzmanNo ratings yet
- Mgac AnsDocument23 pagesMgac AnsMark Ivan JagodillaNo ratings yet
- Emergency Banking Act of 1933 - Federal Reserve HistoryDocument7 pagesEmergency Banking Act of 1933 - Federal Reserve HistoryAlijah ColemanNo ratings yet
- Far Eastern University Mba - Thesis 060517Document2 pagesFar Eastern University Mba - Thesis 060517Lex AcadsNo ratings yet
- Hanjin LocalchagreDocument5 pagesHanjin LocalchagreTrần Minh CườngNo ratings yet
- Chapter-13 Marginal CostingDocument26 pagesChapter-13 Marginal CostingAdi PrajapatiNo ratings yet
- Part 1 - Building Your Own Binary Classification Model - Coursera PDFDocument1 pagePart 1 - Building Your Own Binary Classification Model - Coursera PDFShiva Kumar Ramachandra0% (2)
- P1-Single Entry FormulasDocument3 pagesP1-Single Entry FormulasJohn Yrick EraNo ratings yet
- Job Profile - Assistant Finance Officer - SAMIDRCDocument2 pagesJob Profile - Assistant Finance Officer - SAMIDRCcarrmachingautaNo ratings yet
- Unregulated Deposit Scheme PPT PresentationDocument14 pagesUnregulated Deposit Scheme PPT PresentationPiyush JadhavNo ratings yet
- Table No 89 Jeevan Saathi ReadyDocument11 pagesTable No 89 Jeevan Saathi Readymilanthakar1016No ratings yet
- Finance Manager Job DescriptionDocument3 pagesFinance Manager Job DescriptionUsman SansiNo ratings yet
- MFIN6003 AssignmentsDocument4 pagesMFIN6003 AssignmentscccNo ratings yet
- Firequote - Alma Castillo and or Rodrigo MoralesDocument7 pagesFirequote - Alma Castillo and or Rodrigo MoralesJasper SasaNo ratings yet
- Act 382 Sale of Goods Act 1957Document32 pagesAct 382 Sale of Goods Act 1957Adam Haida & CoNo ratings yet
- Continuity and Change in Philanthropic Housing Organisations The Octavia Hill Housing Trust and The Guinness TrustDocument21 pagesContinuity and Change in Philanthropic Housing Organisations The Octavia Hill Housing Trust and The Guinness TrustGillian WardellNo ratings yet
- Duong LapDocument67 pagesDuong Lap--No ratings yet
- The Customer Behaviour & Custmer Satisfaction at AvivaDocument85 pagesThe Customer Behaviour & Custmer Satisfaction at Avivashashank100% (1)