Download as docx, pdf, or txt
You might also like
- Physics Unit 3 AssignmentDocument19 pagesPhysics Unit 3 AssignmentJade50% (2)
- Sol 6Document13 pagesSol 6akjsdnfNo ratings yet
- Goldstein 13-14-2Document6 pagesGoldstein 13-14-2Meme DollNo ratings yet
- Goldstein Chapter 2 Solutions 19Document15 pagesGoldstein Chapter 2 Solutions 19Meme Doll60% (5)
- 210 MW Siemens V94.2 Gas Turbine Power PlantDocument5 pages210 MW Siemens V94.2 Gas Turbine Power PlantAmit Kumar Gupta100% (2)
- Goldstein 18 21 13 14 20Document15 pagesGoldstein 18 21 13 14 20Abdul Shakoor ButtNo ratings yet
- Aviation AftermarketDocument64 pagesAviation AftermarketChandrasekar MuthukumarNo ratings yet
- Health and Safety News - September 2009Document33 pagesHealth and Safety News - September 2009HealthSafety100% (2)
- 2010 Fall With SolutionsDocument36 pages2010 Fall With SolutionsRay MondoNo ratings yet
- Problem Set 3Document5 pagesProblem Set 3James ConnaughtonNo ratings yet
- Solutions To Problems in Goldstein, Classical Mechanics, Second EditionDocument18 pagesSolutions To Problems in Goldstein, Classical Mechanics, Second EditiondedrNo ratings yet
- Mid Fall 2005Document4 pagesMid Fall 2005Shweta SridharNo ratings yet
- free-TOPIC 4 - ELECTROSTATICS PROBLEMSDocument9 pagesfree-TOPIC 4 - ELECTROSTATICS PROBLEMSLuc AusterNo ratings yet
- Chap 9Document5 pagesChap 9apratim.chatterjiNo ratings yet
- Gold ExercisesDocument26 pagesGold ExercisesJuan Carlos RuizNo ratings yet
- Solutions To Problems in Goldstein, Classical Mechanics, Second EditionDocument70 pagesSolutions To Problems in Goldstein, Classical Mechanics, Second EditionYhunnior RoberthNo ratings yet
- Multivariable Feedback Control: Andrea GuidiDocument13 pagesMultivariable Feedback Control: Andrea GuidiAndrea GuidiNo ratings yet
- Mekanika Benda TegarDocument4 pagesMekanika Benda TegarAhmad PohanNo ratings yet
- Revision Lectures M122 2023 HandoutDocument4 pagesRevision Lectures M122 2023 HandoutRiley CollinsNo ratings yet
- Two Body Problem PDFDocument25 pagesTwo Body Problem PDFHanan Z Amin100% (1)
- Lec 4Document7 pagesLec 4Meysam GheysariNo ratings yet
- PC235W13 Assignment4 SolutionsDocument12 pagesPC235W13 Assignment4 SolutionskwokNo ratings yet
- 3rd Term Exam and SolutionDocument2 pages3rd Term Exam and Solutionapi-3767114No ratings yet
- Brachistochrone Problem and It's Real-Life Application On ArchitectureDocument19 pagesBrachistochrone Problem and It's Real-Life Application On ArchitectureKhola KhanNo ratings yet
- HW4 SolnDocument5 pagesHW4 SolnPooja ChaudharyNo ratings yet
- Exercises of Small OscillationsDocument7 pagesExercises of Small Oscillationscocomluis135790No ratings yet
- ES2A7 - Fluid Mechanics Example Classes: Model Answers To Example Questions (Set II)Document8 pagesES2A7 - Fluid Mechanics Example Classes: Model Answers To Example Questions (Set II)wassan sabahNo ratings yet
- Solut Tent SG2150 Feb 12Document5 pagesSolut Tent SG2150 Feb 12Droffilc Nav Cm MulihamNo ratings yet
- PC235W13 Assignment2 SolutionsDocument9 pagesPC235W13 Assignment2 SolutionskwokNo ratings yet
- Some Basic Concepts: 1.1 Newtons Law and Inertial FramesDocument16 pagesSome Basic Concepts: 1.1 Newtons Law and Inertial Framestbrackman99No ratings yet
- Central Force Motion IIDocument21 pagesCentral Force Motion IIIjaz TalibNo ratings yet
- Candidacy Exam Problems With SolutionsDocument6 pagesCandidacy Exam Problems With SolutionsMonica RicoNo ratings yet
- Goldstein 31 32 7Document8 pagesGoldstein 31 32 7Dijana TolićNo ratings yet
- HW 2Document1 pageHW 2mehmet.n.aydin35No ratings yet
- HW 2Document1 pageHW 2mehmet.n.aydin35No ratings yet
- Assignment 1Document3 pagesAssignment 1Yeleti FamilyNo ratings yet
- 6101 HW 2 Conner Herndon September 2, 2014Document7 pages6101 HW 2 Conner Herndon September 2, 2014Martín FigueroaNo ratings yet
- 2 CylindersDocument20 pages2 CylindersAAKASH JOONNo ratings yet
- Derivation of Gravitational Potential Energy Using Calculus2Document7 pagesDerivation of Gravitational Potential Energy Using Calculus2W-d DomNo ratings yet
- 2 Cylinders ContactDocument20 pages2 Cylinders ContactGuliguli GuliNo ratings yet
- PHY126 HW Set 1 (Chap.10) : Is On Accelerati Angular If, S 167 Rpm/s 1590 S rpm/27) 1200 5500 (Document3 pagesPHY126 HW Set 1 (Chap.10) : Is On Accelerati Angular If, S 167 Rpm/s 1590 S rpm/27) 1200 5500 (Muzamil ShahNo ratings yet
- PHY 5246: Theoretical Dynamics, Fall 2015 September 28, 2015 Midterm Exam # 1Document9 pagesPHY 5246: Theoretical Dynamics, Fall 2015 September 28, 2015 Midterm Exam # 1Jennifer RibeiroNo ratings yet
- Cylinder Rolling On Another Rolling Cylinder: I I I 2 I I I 1Document20 pagesCylinder Rolling On Another Rolling Cylinder: I I I 2 I I I 1Thomas LafontaineNo ratings yet
- A320 Hydrostatic Equilibrium PDFDocument13 pagesA320 Hydrostatic Equilibrium PDFNitish KumarNo ratings yet
- 2019 PHY Advanced Mechanics Electromagnetism Nature of Light and From The Universe To The Atom NotesDocument52 pages2019 PHY Advanced Mechanics Electromagnetism Nature of Light and From The Universe To The Atom Notesmariamarsbar17No ratings yet
- Y20 Phy102 EsDocument28 pagesY20 Phy102 EsSAURAV kumarNo ratings yet
- Solutions 1.8-Page 89 Problem 2: e V T V e X T XDocument8 pagesSolutions 1.8-Page 89 Problem 2: e V T V e X T Xukel de guzmanNo ratings yet
- Hw4 SolutionsDocument7 pagesHw4 SolutionsAn Nahl100% (1)
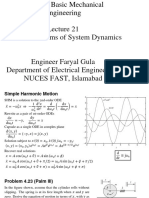
- Lecture 21Document12 pagesLecture 21I190845 Samana NayyabNo ratings yet
- HCI H2 PHY P1 Suggested SolutionDocument4 pagesHCI H2 PHY P1 Suggested Solutionllilizheng8No ratings yet
- Coefficients Supersonic FlowsDocument4 pagesCoefficients Supersonic Flowsa320neoNo ratings yet
- Universidad de Granada - Estabilidad de Presas de Gravedad - VOLVER A DESCARGAR (Se Borraron Hojas) PDFDocument32 pagesUniversidad de Granada - Estabilidad de Presas de Gravedad - VOLVER A DESCARGAR (Se Borraron Hojas) PDFManu RodrigoNo ratings yet
- JulesVerne Skydiving LanderDocument15 pagesJulesVerne Skydiving LanderTeferiNo ratings yet
- Paper On GravitationDocument8 pagesPaper On GravitationShama tanveerNo ratings yet
- Solution:: V 105m S S 62m T 0Document50 pagesSolution:: V 105m S S 62m T 0Yousif AL Ayoubi100% (1)
- References: 10m/s 60cm 60cmDocument9 pagesReferences: 10m/s 60cm 60cmAliOucharNo ratings yet
- Heavens GRDocument37 pagesHeavens GRDavidNo ratings yet
- ModesDocument6 pagesModesPuneet Sharma100% (1)
- The Spectral Theory of Toeplitz Operators. (AM-99), Volume 99From EverandThe Spectral Theory of Toeplitz Operators. (AM-99), Volume 99No ratings yet
- A-level Maths Revision: Cheeky Revision ShortcutsFrom EverandA-level Maths Revision: Cheeky Revision ShortcutsRating: 3.5 out of 5 stars3.5/5 (8)
- AKSHAT JAIN (A245) EVS - PresentationDocument17 pagesAKSHAT JAIN (A245) EVS - PresentationAtharvNo ratings yet
- Michael Reynolds - Earthship - How To Build Your Own, Vol. 1 (1990, Solar Survival Architecture) - Libgen - LiDocument236 pagesMichael Reynolds - Earthship - How To Build Your Own, Vol. 1 (1990, Solar Survival Architecture) - Libgen - LiReda NextGlitchNo ratings yet
- PA Inverter EDTMT452039-ENDocument132 pagesPA Inverter EDTMT452039-ENPhuNguyenHoangNo ratings yet
- ST Series Safety Sensors With RFID TechnologyDocument12 pagesST Series Safety Sensors With RFID Technologyjavivi_75No ratings yet
- QC Story BoardDocument64 pagesQC Story Boardrjyparraguirre8243100% (1)
- Fire Pump Submittal Ramdan Scope - 2014 (1250 GPM)Document83 pagesFire Pump Submittal Ramdan Scope - 2014 (1250 GPM)Śheța ÁymànNo ratings yet
- Electrical Engineering - Electrical MachinesDocument78 pagesElectrical Engineering - Electrical MachinesSangeetha Veera0% (1)
- 190 Sample ChapterDocument55 pages190 Sample ChapterJayit SahaNo ratings yet
- RRVPNL, 132 KV Gss (Gis) Old Power House Jodhpur (Raj.) : Bachelor of TechnologyDocument42 pagesRRVPNL, 132 KV Gss (Gis) Old Power House Jodhpur (Raj.) : Bachelor of TechnologyZombusterNo ratings yet
- ImgDocument8 pagesImgAnonymous Qoz6rhj5yXNo ratings yet
- Shahzaib ShahidDocument2 pagesShahzaib Shahidapi-481915819No ratings yet
- Navarro 2017Document6 pagesNavarro 2017StefanNo ratings yet
- Elastomer TechnologyDocument14 pagesElastomer TechnologySaifuddin AzizNo ratings yet
- Flow Measuring DevicesDocument39 pagesFlow Measuring DevicesAbdul Moeed Kalson100% (1)
- Honeywell Valve Selection GuideDocument58 pagesHoneywell Valve Selection GuideYaz100% (2)
- 10 RT-flex Design PDFDocument15 pages10 RT-flex Design PDFMarijaŽaperNo ratings yet
- Truls Gundersen March 18 PDFDocument30 pagesTruls Gundersen March 18 PDFvazzoleralex6884No ratings yet
- Physical Sciences 2017 P1Document15 pagesPhysical Sciences 2017 P1NameNo ratings yet
- SM 01Document1 pageSM 01MUBASHIRNo ratings yet
- Steam Consumption at Sulphitation / Raw Sugar Factories (Boiling House - Recent Trends)Document6 pagesSteam Consumption at Sulphitation / Raw Sugar Factories (Boiling House - Recent Trends)Yadav ShwetaNo ratings yet
- 1.1 Palm Oil MillDocument31 pages1.1 Palm Oil MillChee Yen ChiaNo ratings yet
- Parallel Pump OperationDocument5 pagesParallel Pump Operationarunima04100% (1)
- 82 L0327Document30 pages82 L0327TLBradburnNo ratings yet
- 101 GasesDocument6 pages101 GasesQaz Zaq100% (1)
- Coal - Cargoes - IMSBC Code PDFDocument7 pagesCoal - Cargoes - IMSBC Code PDFRadhakrishnan DNo ratings yet
- 05-Wellhead Xmas TreeDocument38 pages05-Wellhead Xmas TreeVamsi MahantiNo ratings yet
- SBE Survey V1 ReportDocument11 pagesSBE Survey V1 ReportRique BenitesNo ratings yet