Download as pdf or txt
You might also like
- Flexural or Bending Test Lab ReportDocument9 pagesFlexural or Bending Test Lab ReportKalKatu MaLam73% (22)
- Midas - Nonlinear Analysis Using General Link ElementsDocument20 pagesMidas - Nonlinear Analysis Using General Link ElementsSampathNarayananNo ratings yet
- 9.coupled Effects in Stability Analysis of Pile-Slope SystemsDocument12 pages9.coupled Effects in Stability Analysis of Pile-Slope SystemsanarNo ratings yet
- Chap-03 Anlysis in ProkonDocument115 pagesChap-03 Anlysis in ProkonMohamed Raffik Bagha100% (1)
- 7.1 Introduction and ScopeDocument18 pages7.1 Introduction and Scopeনীল জোছনাNo ratings yet
- Crack Identification in Reinforced Concrete Beams Using ANSYS SoftwareDocument13 pagesCrack Identification in Reinforced Concrete Beams Using ANSYS SoftwarethaibinhkxNo ratings yet
- Chapter 3: Methodology For Finite Element AnalysisDocument13 pagesChapter 3: Methodology For Finite Element Analysissju65No ratings yet
- Write A Bit More About DICDocument4 pagesWrite A Bit More About DICVaishnav BalajiNo ratings yet
- PDF PDFDocument14 pagesPDF PDFVicky VigneshNo ratings yet
- Crack Identification in Reinforced Concrete Beams Using ANSYS SoftwareDocument10 pagesCrack Identification in Reinforced Concrete Beams Using ANSYS SoftwareMarco Gaetani d'AragonaNo ratings yet
- ANSYS Version 10Document6 pagesANSYS Version 10pankaj0983No ratings yet
- (EXTRACT) Ch. VIII Frame Hinge Properties - From CSI (2002) CSI Analysis Reference Manual For SAP2000, Etabs and SafeDocument12 pages(EXTRACT) Ch. VIII Frame Hinge Properties - From CSI (2002) CSI Analysis Reference Manual For SAP2000, Etabs and SafeO SNo ratings yet
- Modelling and Analysis of Reinforced Concrete Beam Under Flexure Using AnsysDocument9 pagesModelling and Analysis of Reinforced Concrete Beam Under Flexure Using AnsysjayanthNo ratings yet
- Solidworks Simulation BasicsDocument28 pagesSolidworks Simulation BasicsvinunfNo ratings yet
- Avoiding Self-Loosening Failure of Bolted Joints With NumericalDocument13 pagesAvoiding Self-Loosening Failure of Bolted Joints With Numericalfoufoua100% (1)
- Fem Lab 6Document23 pagesFem Lab 6Areeba MujtabaNo ratings yet
- Solidworks FEA TheoryDocument6 pagesSolidworks FEA TheoryMelvin LolosNo ratings yet
- Book STDDocument6 pagesBook STDArun KumarNo ratings yet
- Placas StaadDocument18 pagesPlacas StaadFcosmeNo ratings yet
- Pushover Analysis of Steel Structure Using STAADDocument15 pagesPushover Analysis of Steel Structure Using STAADRK MEHTANo ratings yet
- Fem SlabDocument22 pagesFem SlabEfren ElegadoNo ratings yet
- Lab 1 - Tensile-Testing-2022Document7 pagesLab 1 - Tensile-Testing-2022sahanss2001No ratings yet
- Technical Reference 2007Document12 pagesTechnical Reference 2007swathiNo ratings yet
- FoarmingDocument28 pagesFoarmingJM PraveenNo ratings yet
- Solid 65Document9 pagesSolid 65MarKusskadeNo ratings yet
- MK @MSITStore C SProV8i SS5 STAAD Help Technical Reference 2Document12 pagesMK @MSITStore C SProV8i SS5 STAAD Help Technical Reference 2vnkmaheshNo ratings yet
- Lecture 3 Tension MembersDocument28 pagesLecture 3 Tension MembersLhee Ann GarboNo ratings yet
- Chapter 5 - Components PropertiesDocument47 pagesChapter 5 - Components PropertiesHamza CheemaNo ratings yet
- Finite Element Technique: 7.1 Introduction and ScopeDocument34 pagesFinite Element Technique: 7.1 Introduction and ScopeSharon ShineNo ratings yet
- CAE Lab ManualDocument30 pagesCAE Lab Manualsyampnaidu100% (1)
- 2 Swatantra Porwal 526 Research Article Nov 2011Document6 pages2 Swatantra Porwal 526 Research Article Nov 2011kdineshmechNo ratings yet
- AppendixDocument5 pagesAppendixpgdyaneshNo ratings yet
- Finite Element Analysis of Large Diameter Concrete Spherical Shell Domes - Hani Aziz AmeenDocument16 pagesFinite Element Analysis of Large Diameter Concrete Spherical Shell Domes - Hani Aziz AmeenHani Aziz AmeenNo ratings yet
- 3analytical PDFDocument13 pages3analytical PDFBALRAJNo ratings yet
- Bonny Work Cae-1Document14 pagesBonny Work Cae-1MUCUNGUZI BONEVENTURENo ratings yet
- 001 10页,Engineering Failure Analysis论文,Loosening-resistance Evaluation of Double-nut Tightening Method and Spring Washer by Three-dimensional Finite Element AnalysisDocument10 pages001 10页,Engineering Failure Analysis论文,Loosening-resistance Evaluation of Double-nut Tightening Method and Spring Washer by Three-dimensional Finite Element Analysiscary01No ratings yet
- Application of Numerical Methods To Truss Bridge Using Finite Element AnalysisDocument12 pagesApplication of Numerical Methods To Truss Bridge Using Finite Element AnalysisBenmark JabayNo ratings yet
- Example 3 - S-Beam CrashDocument13 pagesExample 3 - S-Beam CrashSanthosh LingappaNo ratings yet
- Atkins QueriesDocument4 pagesAtkins QueriesMuhammad ZeeshanNo ratings yet
- ME 304 Finite Element Analysis Basic Types of FEA ElementsDocument7 pagesME 304 Finite Element Analysis Basic Types of FEA ElementsJoshua KarthikNo ratings yet
- Astm A227Document5 pagesAstm A227Diganta KonerNo ratings yet
- Advanced Finite Element Modeling of Bolted T-Stub Connection ComponentsDocument17 pagesAdvanced Finite Element Modeling of Bolted T-Stub Connection ComponentsSam SamouraNo ratings yet
- Description of Sample Problems: To Features in LS-DYNADocument30 pagesDescription of Sample Problems: To Features in LS-DYNAmech118No ratings yet
- 3-Exp#03 Tensile TestDocument7 pages3-Exp#03 Tensile TestD7ooM_612No ratings yet
- Me-331 Design of Machine Elements Unit 2 Mechanical Systems and Manufacturing Considerations in DesignDocument16 pagesMe-331 Design of Machine Elements Unit 2 Mechanical Systems and Manufacturing Considerations in DesignMuthuvel MNo ratings yet
- 01 - 3D Abutment Foundation PileDocument28 pages01 - 3D Abutment Foundation PileJimmy GodfreyNo ratings yet
- TRN Simulation Question AnswersDocument4 pagesTRN Simulation Question AnswersCristhian Stefano Falchi PosadaNo ratings yet
- Connection 2 FEA PDFDocument22 pagesConnection 2 FEA PDFJoshua CalaNo ratings yet
- Me161011 Lab 4Document11 pagesMe161011 Lab 4Muhammad HamzaNo ratings yet
- International Journal of Engineering Research and DevelopmentDocument5 pagesInternational Journal of Engineering Research and DevelopmentIJERDNo ratings yet
- Technical Tidbits March-April 2005 - Elastic ModulusDocument2 pagesTechnical Tidbits March-April 2005 - Elastic Modulusvaasscit4554No ratings yet
- Technical Reference 2007Document11 pagesTechnical Reference 2007Shital ChaudhariNo ratings yet
- Advanced Opensees Algorithms, Volume 1: Probability Analysis Of High Pier Cable-Stayed Bridge Under Multiple-Support Excitations, And LiquefactionFrom EverandAdvanced Opensees Algorithms, Volume 1: Probability Analysis Of High Pier Cable-Stayed Bridge Under Multiple-Support Excitations, And LiquefactionNo ratings yet
- Dynamic Damage and FragmentationFrom EverandDynamic Damage and FragmentationDavid Edward LambertNo ratings yet
- Ansys FileDocument7 pagesAnsys FileChetan B ArkasaliNo ratings yet
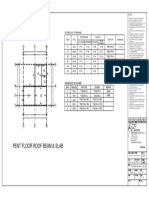
- Beam Layout & Schedule of ReinforcementDocument1 pageBeam Layout & Schedule of ReinforcementChetan B ArkasaliNo ratings yet
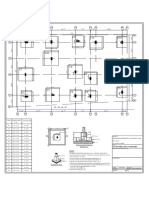
- Foundation Layout & Central Line of ColumnsDocument1 pageFoundation Layout & Central Line of ColumnsChetan B ArkasaliNo ratings yet
- Ound & First Floor PlanDocument1 pageOund & First Floor PlanChetan B ArkasaliNo ratings yet
- Bridge Analysis DataDocument12 pagesBridge Analysis DataChetan B ArkasaliNo ratings yet
- Modeling of Howe Roof TrussDocument6 pagesModeling of Howe Roof TrussChetan B ArkasaliNo ratings yet
- Design, Modelling and Manufacture 3Document48 pagesDesign, Modelling and Manufacture 3Chetan B ArkasaliNo ratings yet