Download as pdf or txt
You might also like
- Physics Laboratory Report: Moment of Inertia and Energy in Rotational MotionDocument8 pagesPhysics Laboratory Report: Moment of Inertia and Energy in Rotational Motionsabrina zemNo ratings yet
- Hydrostatics PressureBDocument13 pagesHydrostatics PressureBmontaser.nalawiNo ratings yet
- Futures Truth Magazine Issue 2016 PDFDocument38 pagesFutures Truth Magazine Issue 2016 PDFMichael Liu100% (1)
- Syllabus Math1550 04 HarhadDocument4 pagesSyllabus Math1550 04 HarhadFake NameNo ratings yet
- Harcourt - Geometry and Discrete 12Document561 pagesHarcourt - Geometry and Discrete 12Uwo Turnt100% (1)
- MATHS by Nadeem Akhtar SadiqueDocument3 pagesMATHS by Nadeem Akhtar SadiqueMuhammad Ahsan Akram50% (10)
- Data SheetDocument1 pageData SheetMuhammad AlnahasNo ratings yet
- Mass 3-300Document2 pagesMass 3-300fahmi azisNo ratings yet
- Solidworks Premium 2022 Sp5.0 - (Tip b1Document1 pageSolidworks Premium 2022 Sp5.0 - (Tip b1AldinNo ratings yet
- Mass 4-300Document2 pagesMass 4-300fahmi azisNo ratings yet
- Mass 8-300Document2 pagesMass 8-300fahmi azisNo ratings yet
- 270 WiperDocument1 page270 WiperAlthaf ArrajwaNo ratings yet
- Wiper 45 SHALDocument1 pageWiper 45 SHALAlthaf ArrajwaNo ratings yet
- UntitledDocument1 pageUntitledMB SIXTEENNo ratings yet
- Coussinet 1 D 1800 L 900Document1 pageCoussinet 1 D 1800 L 900Mh ZaNo ratings yet
- TractorDocument1 pageTractornafas.mr25No ratings yet
- WeightDocument1 pageWeightKai McDermottNo ratings yet
- Axle Support Mass PropertiesDocument1 pageAxle Support Mass PropertiesJay JivandasNo ratings yet
- SOLIDWORKS Premium 2016 x64 Edition - (Part1 - )Document1 pageSOLIDWORKS Premium 2016 x64 Edition - (Part1 - )dimas6setyawanNo ratings yet
- SOLIDWORKS Premium 2016 x64 Edition - (Part1 - ) PDFDocument1 pageSOLIDWORKS Premium 2016 x64 Edition - (Part1 - ) PDFdimas6setyawanNo ratings yet
- AnalysisDocument1 pageAnalysisQusai mutaz HammdanNo ratings yet
- Mountain BoardDocument1 pageMountain BoardVicky Satria PramuditaNo ratings yet
- General Physics 1 - Quarter 1 - Week 7 SSLMDocument6 pagesGeneral Physics 1 - Quarter 1 - Week 7 SSLMCarmina Jane DomantayNo ratings yet
- SOLIDWORKS Premium 2015 x64 Edition - (Centrifugal Impeller New - SLDPRT)Document1 pageSOLIDWORKS Premium 2015 x64 Edition - (Centrifugal Impeller New - SLDPRT)Prihadi NikosaiNo ratings yet
- Sem4 Numerical IntegrationDocument29 pagesSem4 Numerical IntegrationAaryaNo ratings yet
- How To Plan A Experiment: Density Mass/VolumeDocument15 pagesHow To Plan A Experiment: Density Mass/VolumeMaitrey TelangNo ratings yet
- Col 1 ( 2.00 0.00m) Col 1 (0.00 3.06m) : SD Take SD SD Take SD SDX SDX Sdy SdyDocument9 pagesCol 1 ( 2.00 0.00m) Col 1 (0.00 3.06m) : SD Take SD SD Take SD SDX SDX Sdy SdyTefera TemesgenNo ratings yet
- First Condition of EquilibriumDocument7 pagesFirst Condition of EquilibriumCandeluna LorlanNo ratings yet
- Excellent I CCTDocument1 pageExcellent I CCTHazim HamdanNo ratings yet
- Botogon - Center of MassDocument6 pagesBotogon - Center of MassRhod Jayson RicaldeNo ratings yet
- Staircase MassDocument1 pageStaircase MassSandeep HarsoraNo ratings yet
- MassDocument1 pageMassMechanical ServiceNo ratings yet
- Evaluate Mass Pallet D. Roll DSFDocument1 pageEvaluate Mass Pallet D. Roll DSFAlan RohimatNo ratings yet
- Torque LabDocument7 pagesTorque LabAndrea PerezNo ratings yet
- 247251661class Xi Physics PDFDocument297 pages247251661class Xi Physics PDFShikhar YadavNo ratings yet
- Lab 5 (... )Document10 pagesLab 5 (... )Zeeshan JuttNo ratings yet
- For Purlins and Sagrods: 1.49 KG/M 1kN 1000 N 47.88 N /M 1lb/ft 1kN 1000 NDocument3 pagesFor Purlins and Sagrods: 1.49 KG/M 1kN 1000 N 47.88 N /M 1lb/ft 1kN 1000 NJoshua BalleonNo ratings yet
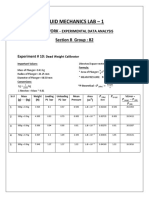
- Fluid Mechanics Lab - 1: Classwork - Section B Group: B2Document4 pagesFluid Mechanics Lab - 1: Classwork - Section B Group: B2M. RazaNo ratings yet
- PMPH120 - Lab 3 - SHM and Spring Constant - SolutionsDocument11 pagesPMPH120 - Lab 3 - SHM and Spring Constant - SolutionsTavonga ShokoNo ratings yet
- FUNDATII ModelDocument8 pagesFUNDATII ModelAdrian AnghelescuNo ratings yet
- Structural Analysis FEA AnalysisDocument19 pagesStructural Analysis FEA AnalysiseleonorNo ratings yet
- Laboratory Experiment No.4: Intended Learning OutcomesDocument11 pagesLaboratory Experiment No.4: Intended Learning OutcomesKyle VillarizaNo ratings yet
- Marks Exploration 2 - Using Quadratic Regression and Volume of Revolution Disc Method To Calculate The Volumes of Cooking Ingredients Non - AnnotatedDocument12 pagesMarks Exploration 2 - Using Quadratic Regression and Volume of Revolution Disc Method To Calculate The Volumes of Cooking Ingredients Non - Annotatedgaurav gregrathNo ratings yet
- Column NoteDocument3 pagesColumn Notehassan amiriNo ratings yet
- Moment of Inertia of A FlywheelDocument8 pagesMoment of Inertia of A FlywheelLaith MarzoukaNo ratings yet
- PesosDocument18 pagesPesosmrnicusNo ratings yet
- Bsme 1 3 G1 E3Document12 pagesBsme 1 3 G1 E3Daniel ParungaoNo ratings yet
- Lab 2 Isaac Justine D20191089836Document5 pagesLab 2 Isaac Justine D20191089836Joko MrNo ratings yet
- VP Task 2Document24 pagesVP Task 2Redwan KhalequeNo ratings yet
- Conversion of UnitsDocument27 pagesConversion of UnitsEr Pardeep KumarNo ratings yet
- Orange Train AnalysisDocument10 pagesOrange Train AnalysisMuhammad Shaheryar AbidNo ratings yet
- Lab 5 (... )Document9 pagesLab 5 (... )Zeeshan JuttNo ratings yet
- Unit 2 Forces - Force, Mass, Acceleration Lab Calculation InstructionsDocument4 pagesUnit 2 Forces - Force, Mass, Acceleration Lab Calculation InstructionsnamahNo ratings yet
- Answers To Even-Numbered Conceptual QuestionsDocument6 pagesAnswers To Even-Numbered Conceptual QuestionslazarNo ratings yet
- Hps KosongDocument169 pagesHps KosonglisaNo ratings yet
- EstimateDocument9 pagesEstimateSage ChanNo ratings yet
- Col 1Document9 pagesCol 1Tefera TemesgenNo ratings yet
- Learning Objectives: at The End of This Chapter, You Should Be Able ToDocument26 pagesLearning Objectives: at The End of This Chapter, You Should Be Able TotimunNo ratings yet
- Structural Calculations Typical Unitised Structural Glazing: Page 1 of 39Document39 pagesStructural Calculations Typical Unitised Structural Glazing: Page 1 of 39VISHAL - CONQUÉRANTNo ratings yet
- Experiment 10: Simple Harmonic Motions: PurposeDocument6 pagesExperiment 10: Simple Harmonic Motions: PurposeRahmedZNo ratings yet
- Bab III (Baja)Document10 pagesBab III (Baja)mfachulNo ratings yet
- S.W DESIGNl (UNIFORME RENFORCEMENT) 4Document9 pagesS.W DESIGNl (UNIFORME RENFORCEMENT) 4JD HemaNo ratings yet
- Inverse Trigonometric Functions (Trigonometry) Mathematics Question BankFrom EverandInverse Trigonometric Functions (Trigonometry) Mathematics Question BankNo ratings yet
- Formation Integrity TestDocument1 pageFormation Integrity Testfad003100% (1)
- 4way ValveDocument1 page4way Valvefad003No ratings yet
- Smart Materials: Done By: AL-salt Malik AL-sultiDocument11 pagesSmart Materials: Done By: AL-salt Malik AL-sultifad003No ratings yet
- Model Answer For HW3 MCTE010Document5 pagesModel Answer For HW3 MCTE010fad003No ratings yet
- Connector 2 DDocument1 pageConnector 2 Dfad003No ratings yet
- Normal and Tangential Components of AccelerationDocument8 pagesNormal and Tangential Components of AccelerationihtishamqabidNo ratings yet
- A Var Is UsefulDocument8 pagesA Var Is UsefulanilNo ratings yet
- Cook's TheoremDocument18 pagesCook's TheoremtarunNo ratings yet
- (TABLES K and L) Critical Values For The Wilcoxon Signed-Ranked Test The Rank Correlation CoefficientDocument1 page(TABLES K and L) Critical Values For The Wilcoxon Signed-Ranked Test The Rank Correlation CoefficientDanial ShahNo ratings yet
- Math Review For Practicing To Take The GRE General TestDocument69 pagesMath Review For Practicing To Take The GRE General TestMd.Mahbubul BasharNo ratings yet
- Algebra II Advanced Algebra StandardsDocument10 pagesAlgebra II Advanced Algebra Standardsapi-408373869No ratings yet
- Addition of 2-3 Digit NumbersDocument28 pagesAddition of 2-3 Digit NumbersJuliah Katrina Yndra FernandezNo ratings yet
- Carpet LayingDocument34 pagesCarpet Layingdavisfc50No ratings yet
- Engineering Statics: Instructor: Chapter 1: IntroductionDocument15 pagesEngineering Statics: Instructor: Chapter 1: IntroductionProf. DesignNo ratings yet
- D4.1 Simulation ModelsDocument10 pagesD4.1 Simulation ModelsAbd Muhaimin AmmsNo ratings yet
- Assignment 2b SolutionsDocument12 pagesAssignment 2b SolutionsvbweuhvbwNo ratings yet
- 10-Volume of Pyramids and ConesDocument4 pages10-Volume of Pyramids and ConesIzzatul HaniNo ratings yet
- Anees Hussain: Xi Mathematics FormulaeDocument33 pagesAnees Hussain: Xi Mathematics FormulaeRida TayyabNo ratings yet
- The Riemann Hypothesis and The Eulers Qu PDFDocument13 pagesThe Riemann Hypothesis and The Eulers Qu PDFarnoldo3551No ratings yet
- B.tech Subjects ListDocument5 pagesB.tech Subjects ListGaneshMulayNo ratings yet
- To Deduce That The Other 49% Are Females.) One Adult Is Randomly Selected For A Survey InvolvingDocument6 pagesTo Deduce That The Other 49% Are Females.) One Adult Is Randomly Selected For A Survey InvolvingDaniel RizviNo ratings yet
- Characteristics of Cetane Index of Traditional Diesel Oil in Wonocolo District, BojonegoroDocument6 pagesCharacteristics of Cetane Index of Traditional Diesel Oil in Wonocolo District, Bojonegoromasoud sheikhiNo ratings yet
- Mining Discriminative Patterns To Predict Health Status For Cardiopulmonary PatientsDocument56 pagesMining Discriminative Patterns To Predict Health Status For Cardiopulmonary Patientsaniltatti25No ratings yet
- Comparison of Calculated and Experimental Power HAUSER 2004Document12 pagesComparison of Calculated and Experimental Power HAUSER 2004PabloNo ratings yet
- שדות אלקטרומגנטיים - חומרים דיאלקטריים - 356153Document39 pagesשדות אלקטרומגנטיים - חומרים דיאלקטריים - 356153Faruz DanielNo ratings yet
- Fourier Series and Fourier Transform SummaryDocument23 pagesFourier Series and Fourier Transform Summary9cvxx9nqbfNo ratings yet
- Note For BU AdmissionDocument3 pagesNote For BU AdmissionBanc BorripatNo ratings yet
- Experiment M4Document17 pagesExperiment M4Ann Shen ThianNo ratings yet
- Chapter 12 SolutionsDocument11 pagesChapter 12 SolutionswieNo ratings yet
- An Analysis On Soil Properties On Predicting Critical Hydraulic GDocument38 pagesAn Analysis On Soil Properties On Predicting Critical Hydraulic GmegunNo ratings yet
- Chapter 4 - Part IV - Stress and SettlementDocument25 pagesChapter 4 - Part IV - Stress and Settlementsam19961No ratings yet