Download as pdf or txt
You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5821)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1093)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (852)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (590)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (898)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (540)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (349)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (822)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (403)
- ADHD Test DIVA 5-0Document12 pagesADHD Test DIVA 5-0Augustin Gireada100% (4)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- What Got You Here Won't Get You ThereDocument6 pagesWhat Got You Here Won't Get You Thereshri120950% (2)
- Ca 800Document83 pagesCa 800Pablo CzNo ratings yet
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- CND 017 07 071007Document7 pagesCND 017 07 071007liufei3190No ratings yet
- 95 - A53 Z1 9 0020 B en - Technical DocumentationDocument184 pages95 - A53 Z1 9 0020 B en - Technical DocumentationSyed Mohammad NaveedNo ratings yet
- Ce225 Statistics For Civil Engineers Midterm Examination IDocument2 pagesCe225 Statistics For Civil Engineers Midterm Examination Iznour alyNo ratings yet
- Indian Hospital With BedsDocument2 pagesIndian Hospital With BedsSME FuturesNo ratings yet
- DJM30073 Labwork1Document9 pagesDJM30073 Labwork1Muhammad R IbrahimNo ratings yet
- A IntroductionDocument16 pagesA Introductiond0vyNo ratings yet
- Scanning Electron Microscope (SEM)Document51 pagesScanning Electron Microscope (SEM)Maaz ZafarNo ratings yet
- Annual Report 2018Document55 pagesAnnual Report 2018AbNo ratings yet
- BTech CTISDocument3 pagesBTech CTISAbhishek PatilNo ratings yet
- Crook Nolan Thleats OptimizationofDistributionCentersforAmazonPrimeFinal IEEEDocument11 pagesCrook Nolan Thleats OptimizationofDistributionCentersforAmazonPrimeFinal IEEELimatono Nixon 7033RVXLNo ratings yet
- Userful Multiseat Vs Windows MultipointDocument2 pagesUserful Multiseat Vs Windows MultipointAdeniyi AleseNo ratings yet
- MVRDocument8 pagesMVRBagus HutomoNo ratings yet
- 28 TerminalsDocument42 pages28 TerminalsAlin FazacasNo ratings yet
- 2022-12-15 StrategiesDocument1 page2022-12-15 StrategiesquemilangaNo ratings yet
- Scott Sedam Process and ProfitDocument41 pagesScott Sedam Process and ProfitMark LynchNo ratings yet
- Effect of Acidification and Neutralization of CaseinDocument16 pagesEffect of Acidification and Neutralization of CaseinpoiamanNo ratings yet
- Activity 1 - Animation History and Career OpportunitiesDocument10 pagesActivity 1 - Animation History and Career OpportunitiesVirgilio FeliciaNo ratings yet
- Nat - wld1060 - 2nd Lesson PlanDocument3 pagesNat - wld1060 - 2nd Lesson Planapi-229243042No ratings yet
- Motorless Weed CutterDocument3 pagesMotorless Weed CutterSiginam VineethNo ratings yet
- Capabilities by AircraftDocument48 pagesCapabilities by AircraftApuu Na Juak EhNo ratings yet
- Mba ZC415 Course HandoutDocument11 pagesMba ZC415 Course HandoutareanNo ratings yet
- Educational Institutions Have A Responsibility To Dissuade Students From Pursuing Fields of Study in Which They Are Unlikely To SucceedDocument2 pagesEducational Institutions Have A Responsibility To Dissuade Students From Pursuing Fields of Study in Which They Are Unlikely To SucceedsusmithaNo ratings yet
- KVS Class 8 PT1 Exam Maths Question Paper 2018 by KV SitapurDocument2 pagesKVS Class 8 PT1 Exam Maths Question Paper 2018 by KV Sitapuredge pcNo ratings yet
- 4a.plant LayoutDocument31 pages4a.plant LayoutSagar PhullNo ratings yet
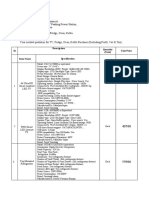
- Sl. Description Quantity (Unit) Unit Price Specification: 1 4k Ultra HD Smart Android Led TVDocument2 pagesSl. Description Quantity (Unit) Unit Price Specification: 1 4k Ultra HD Smart Android Led TVTausif ChowdhuryNo ratings yet
- Slawinski Et Al. - 2010 - Kinematic and Kinetic Comparisons of Elite and Well-Trained Sprinters During Sprint StartDocument10 pagesSlawinski Et Al. - 2010 - Kinematic and Kinetic Comparisons of Elite and Well-Trained Sprinters During Sprint StartAhmad MustaqimNo ratings yet
- Chapter 9 Unpacking of Curriculum StandardsDocument6 pagesChapter 9 Unpacking of Curriculum StandardsGirlie DollenteNo ratings yet