Download as pdf or txt
You might also like
- Data Analysis ProblemsDocument12 pagesData Analysis Problems陈凯华No ratings yet
- AB Unit 3 HRM Semester - Jan2021Document13 pagesAB Unit 3 HRM Semester - Jan2021Fahmina AhmedNo ratings yet
- Art Journal 41 3 The Russian Avant-GardeDocument41 pagesArt Journal 41 3 The Russian Avant-GardeCarlos De Landa AcostaNo ratings yet
- Folk Violin SongbookDocument19 pagesFolk Violin SongbookTyler Swinn100% (1)
- Simulation Based Performance Analysis of ProductioDocument7 pagesSimulation Based Performance Analysis of ProductioAyoub MOHTARAMNo ratings yet
- Controlling of Logistics ProjectsDocument17 pagesControlling of Logistics ProjectsVipul PuthurNo ratings yet
- Logistics Technology Forecasting Framework Using Patent Analysis For Technology RoadmapDocument30 pagesLogistics Technology Forecasting Framework Using Patent Analysis For Technology RoadmapModeresa GopalNo ratings yet
- 1 s2.0 S2351978921002638 MainDocument5 pages1 s2.0 S2351978921002638 Mainmario WaateNo ratings yet
- Logistics 4.0 and Supply Chain 4.0 in The Automotive IndustryDocument7 pagesLogistics 4.0 and Supply Chain 4.0 in The Automotive IndustryBranimir ZivanovicNo ratings yet
- Logistics 4.0: Definition and Historical Background: October 2019Document5 pagesLogistics 4.0: Definition and Historical Background: October 2019TSBL CHENNAINo ratings yet
- Alpha-Beta-Gamma The UnveilingDocument2 pagesAlpha-Beta-Gamma The UnveilingAnish DalmiaNo ratings yet
- Thesis DTSDocument7 pagesThesis DTSAhmed AmrNo ratings yet
- Uevos Desafios y OportunosssDocument7 pagesUevos Desafios y Oportunosssalexax garciaNo ratings yet
- Intelligent Warehouse Management SystemDocument5 pagesIntelligent Warehouse Management SystemRaghu BNo ratings yet
- ##Future Logistics - Challenges Requirements and Solutions For Logistics NetworksDocument7 pages##Future Logistics - Challenges Requirements and Solutions For Logistics NetworksMeet JainNo ratings yet
- Cleaner Logistics and Supply ChainDocument9 pagesCleaner Logistics and Supply ChainAditt AditNo ratings yet
- A - Flexible - High - and - Low - Level - Multi - Task - Behavior - Framework - For - Multi-Agent - Systems - in - Complex - EnvironmentsDocument5 pagesA - Flexible - High - and - Low - Level - Multi - Task - Behavior - Framework - For - Multi-Agent - Systems - in - Complex - EnvironmentsjcaodduoNo ratings yet
- Grille D'analyseDocument42 pagesGrille D'analyseالعبقري المحترفNo ratings yet
- Smart Connected LogisticsDocument6 pagesSmart Connected LogisticsRiz ChNo ratings yet
- Evaluation of Third Party Logistics in Supply Chain IJERTV2IS4954Document4 pagesEvaluation of Third Party Logistics in Supply Chain IJERTV2IS4954Santosh KarakNo ratings yet
- No More Heavy Lifting: Robotic Solutions To The Container Unloading ProblemDocument11 pagesNo More Heavy Lifting: Robotic Solutions To The Container Unloading ProblemErick VLNo ratings yet
- Performance Analysis of Flexible Material Handling Systems For The Apparel IndustryDocument12 pagesPerformance Analysis of Flexible Material Handling Systems For The Apparel IndustrySufitya FidayatiNo ratings yet
- 2Vol5No6phd3 PDFDocument10 pages2Vol5No6phd3 PDFSubrat SahooNo ratings yet
- Development of An Integrated Logistic Model in An Organization For An Automotive Application ProblemDocument10 pagesDevelopment of An Integrated Logistic Model in An Organization For An Automotive Application ProblemSubrat SahooNo ratings yet
- An investigation of logistic operation in a crossdocking distribution system with RFIDDocument6 pagesAn investigation of logistic operation in a crossdocking distribution system with RFIDtrialdiscordNo ratings yet
- LOGISTICA INVEstigstivsDocument26 pagesLOGISTICA INVEstigstivsalexax garciaNo ratings yet
- Smart Logistics and The Logistics Operator 4.0: July 2020Document7 pagesSmart Logistics and The Logistics Operator 4.0: July 2020Moderesa GopalNo ratings yet
- Challenges of Augmented Reality in LogisticsDocument31 pagesChallenges of Augmented Reality in LogisticsAi NguyenNo ratings yet
- Logistics Performance Measurement System For The AutomotiveDocument27 pagesLogistics Performance Measurement System For The AutomotiveSigmaNo ratings yet
- Logistics Service Provider LifDocument19 pagesLogistics Service Provider LifAlinet FernandezNo ratings yet
- ProductuionDocument9 pagesProductuionachintabiswas1500No ratings yet
- 1 s2.0 S0166361520305777 MainDocument21 pages1 s2.0 S0166361520305777 Mainseto sumargoNo ratings yet
- Akshaya SoniaDocument2 pagesAkshaya SoniaNaveen MosesNo ratings yet
- Coursework Logisitics ManagementDocument9 pagesCoursework Logisitics ManagementCristopher Romero DanlogNo ratings yet
- Outsourcing of Logistics ActivitiesDocument5 pagesOutsourcing of Logistics ActivitiespotatoNo ratings yet
- 1 s2.0 S092188901630447X MainDocument11 pages1 s2.0 S092188901630447X Mainypes61205No ratings yet
- Intelligent Transport System Based On RFID and Multiagent Approaches2008IFIP International Federation For Information ProcessingDocument8 pagesIntelligent Transport System Based On RFID and Multiagent Approaches2008IFIP International Federation For Information ProcessingCarolina JaimesNo ratings yet
- Electronics 11 00308 v3Document27 pagesElectronics 11 00308 v3Abolfazl TalebzadehNo ratings yet
- Liu Et Al - A Theoretical Framework of An Integrated Logistics System - 2007Document6 pagesLiu Et Al - A Theoretical Framework of An Integrated Logistics System - 2007DanielNo ratings yet
- Material Procurement ProcessDocument9 pagesMaterial Procurement Processkavikrishna1No ratings yet
- Implementation Fo Industry 4.0 in The Belt Conveyor TransportDocument6 pagesImplementation Fo Industry 4.0 in The Belt Conveyor TransportEdinson GuevaraNo ratings yet
- Simulation Optimization Research On Logistics Distribution Center Picking OperationDocument5 pagesSimulation Optimization Research On Logistics Distribution Center Picking OperationMiguel PeñaNo ratings yet
- WEEK 1ntroduction To Logistics AVIASL PDFDocument16 pagesWEEK 1ntroduction To Logistics AVIASL PDFIrving GutrzNo ratings yet
- Cichosz Ementor 5 77 2018Document11 pagesCichosz Ementor 5 77 2018StoianElenaRoxanaNo ratings yet
- Cainiao Highlights of IPO Prospectus MW Oct 2023 Qerv4mDocument24 pagesCainiao Highlights of IPO Prospectus MW Oct 2023 Qerv4mhojunxiongNo ratings yet
- Confidential: Topic Number: QUESTION:Supply Chain Management /logistics Today IsDocument6 pagesConfidential: Topic Number: QUESTION:Supply Chain Management /logistics Today IsMohd Azmezanshah Bin SezwanNo ratings yet
- Evaluating Total Logistics Costs at Macro and Micro Level Literature Review IJERTV7IS020167 PDFDocument7 pagesEvaluating Total Logistics Costs at Macro and Micro Level Literature Review IJERTV7IS020167 PDFFranco GhirimoldiNo ratings yet
- Final EssayDocument22 pagesFinal EssayALPHA CENTAURINo ratings yet
- Manufacturing Letters: Emanuele Frontoni, Roberto Rosetti, Marina Paolanti, A.C. AlvesDocument4 pagesManufacturing Letters: Emanuele Frontoni, Roberto Rosetti, Marina Paolanti, A.C. AlvesKaren Stephanie Carranza VergaraNo ratings yet
- Design and Implementation of Load Sensing Robotic Car SystemDocument3 pagesDesign and Implementation of Load Sensing Robotic Car SystemAbraham tuyishimeNo ratings yet
- Key Technologies of Warehousing Robot For Intelligent LogisticsDocument4 pagesKey Technologies of Warehousing Robot For Intelligent LogisticsNelinho Hurtado CalderónNo ratings yet
- The State of Industrial Robotics: Emerging Technologies, Challenges, and Key Research DirectionsDocument33 pagesThe State of Industrial Robotics: Emerging Technologies, Challenges, and Key Research DirectionsTanawat ThaikaewNo ratings yet
- Industrial Automation Based On CPS - Implementation & ChallengesDocument15 pagesIndustrial Automation Based On CPS - Implementation & ChallengesMathew ChackoNo ratings yet
- Mini Project 2Document29 pagesMini Project 2Shubham MaheshwariNo ratings yet
- E-Commerce Logistics in Supply Chain Management Implementations and Future Perspective in Furniture IndustryDocument25 pagesE-Commerce Logistics in Supply Chain Management Implementations and Future Perspective in Furniture IndustryPaul KoromaNo ratings yet
- TPRS 2020 Ijpr 1765Document20 pagesTPRS 2020 Ijpr 1765AdindaKhairunisaNo ratings yet
- Risk Related To AGV Systems-Open-Access LiteratureDocument23 pagesRisk Related To AGV Systems-Open-Access LiteratureRudy BarcenasNo ratings yet
- Machines: Smart Warehouse Management System: Architecture, Real-Time Implementation and Prototype DesignDocument21 pagesMachines: Smart Warehouse Management System: Architecture, Real-Time Implementation and Prototype DesignEmilija BozinovskaNo ratings yet
- Integration of Business and ManufacturinDocument2 pagesIntegration of Business and ManufacturinAbraham RayaNo ratings yet
- Spare Parts Logistics of Automobile Enterprises in Conditions of Module ProductionDocument10 pagesSpare Parts Logistics of Automobile Enterprises in Conditions of Module ProductionMateosNo ratings yet
- 1 s2.0 S0166361517301902 MainDocument12 pages1 s2.0 S0166361517301902 MainBasNo ratings yet
- Adi LogisticsDocument27 pagesAdi LogisticsAdiUpadhyayNo ratings yet
- Impact of Outsourcing On LogisticsDocument9 pagesImpact of Outsourcing On LogisticsMuhammad SaqibNo ratings yet
- Technology Trends in Materials Management: A Systematic Review of the Use of Technology in Materials Management to Achieve Competitive AdvantagesFrom EverandTechnology Trends in Materials Management: A Systematic Review of the Use of Technology in Materials Management to Achieve Competitive AdvantagesRating: 5 out of 5 stars5/5 (1)
- Assignments NPTELDocument6 pagesAssignments NPTELavinash kumarNo ratings yet
- Cognitive ComputingDocument23 pagesCognitive Computingavinash kumarNo ratings yet
- VRPPTDocument22 pagesVRPPTavinash kumarNo ratings yet
- Machine Learning Lab ManualDocument81 pagesMachine Learning Lab Manualavinash kumar100% (1)
- Cyberbullying Detection Based On seMDDocument8 pagesCyberbullying Detection Based On seMDavinash kumarNo ratings yet
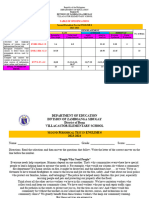
- PT English-6 Q2Document7 pagesPT English-6 Q2Elona Jane CapangpanganNo ratings yet
- City Planning and Neighbourhood Design Case Studies1Document132 pagesCity Planning and Neighbourhood Design Case Studies1shinmiNo ratings yet
- Evaporation of Different Liquids PDFDocument2 pagesEvaporation of Different Liquids PDFMandyNo ratings yet
- Lesson Plan - 2 1Document20 pagesLesson Plan - 2 1api-311773794No ratings yet
- Food ServiceDocument148 pagesFood ServiceAkash SinghNo ratings yet
- Is 4031 5 1988 PDFDocument7 pagesIs 4031 5 1988 PDFRamesh Subramani Ramachandran100% (1)
- Residence Time Distribution For Chemical ReactorsDocument71 pagesResidence Time Distribution For Chemical ReactorsJuan Carlos Serrano MedranoNo ratings yet
- Ritishree Offer EztruckDocument4 pagesRitishree Offer EztruckKali RathNo ratings yet
- DissertationDocument54 pagesDissertationRakesh Insan100% (1)
- DS Workbook 23SC1202Document199 pagesDS Workbook 23SC1202Arjun JagiriNo ratings yet
- WVA Consulting Engineers PVT LTD: Analsyis and Design of Steel Watch TowerDocument23 pagesWVA Consulting Engineers PVT LTD: Analsyis and Design of Steel Watch TowerRomyMohanNo ratings yet
- Unit 3 - Promotion - 27 Aug - ShareDocument38 pagesUnit 3 - Promotion - 27 Aug - SharebansaltulikaNo ratings yet
- Inquiry-Based Lesson Plan - HypothesesDocument3 pagesInquiry-Based Lesson Plan - Hypothesesapi-532939717No ratings yet
- CH 01 Wooldridge 5e PPTDocument23 pagesCH 01 Wooldridge 5e PPTKrithiga Soundrajan100% (1)
- Depth of FocusDocument7 pagesDepth of FocusDr-Riya MondalNo ratings yet
- CAT Test Series 2015Document2 pagesCAT Test Series 2015Nikhil SiddharthNo ratings yet
- Terraria Official Lore PDFDocument3 pagesTerraria Official Lore PDFCavalo SebosoNo ratings yet
- Deyu Cai: General Notes and SpecificationDocument1 pageDeyu Cai: General Notes and SpecificationSKYLERNo ratings yet
- Factoring HandoutDocument2 pagesFactoring HandoutJordan SenkoNo ratings yet
- Azolla: A Review of Its Biology and UtilizationDocument6 pagesAzolla: A Review of Its Biology and UtilizationAaron PabionaNo ratings yet
- Ase Sag 1 PDFDocument376 pagesAse Sag 1 PDFZack HastleNo ratings yet
- Allen StoneDocument4 pagesAllen StoneRubén FernándezNo ratings yet
- 9 Cir vs. Baier-Nickel DGSTDocument2 pages9 Cir vs. Baier-Nickel DGSTMiguelNo ratings yet
- Chapter 1 To 6Document96 pagesChapter 1 To 6Nga Lê Nguyễn PhươngNo ratings yet
- Group 3Document59 pagesGroup 3Grey Sinclair100% (1)
- K-System Isolated Barriers: ManualDocument52 pagesK-System Isolated Barriers: ManualPaul Ramos CarcaustoNo ratings yet