Download as pdf or txt
You might also like
- CS230: Deep Learning: Winter Quarter 2018 Stanford University Midterm Examination 180 MinutesDocument36 pagesCS230: Deep Learning: Winter Quarter 2018 Stanford University Midterm Examination 180 Minuteshimanshu singh100% (1)
- Mechanics of MachinesDocument4 pagesMechanics of MachinesDineshkumar0% (2)
- MT1SP19Document13 pagesMT1SP19HasimNo ratings yet
- SP18 CS182 Midterm Solutions - EditedDocument14 pagesSP18 CS182 Midterm Solutions - EditedHasimNo ratings yet
- F16midterm Sols v2Document14 pagesF16midterm Sols v2Nawaal SiddiqueNo ratings yet
- Exercises INF 5860 Solution HintsDocument11 pagesExercises INF 5860 Solution HintsPatrick O'RourkeNo ratings yet
- SP18 Practice MidtermDocument5 pagesSP18 Practice MidtermHasimNo ratings yet
- Advantages:: Q.No 1.a AnsDocument12 pagesAdvantages:: Q.No 1.a AnsTiwari VivekNo ratings yet
- Week - 5 (Deep Learning) Q. 1) Explain The Architecture of Feed Forward Neural Network or Multilayer Perceptron. (12 Marks)Document7 pagesWeek - 5 (Deep Learning) Q. 1) Explain The Architecture of Feed Forward Neural Network or Multilayer Perceptron. (12 Marks)Mrunal BhilareNo ratings yet
- Cs230exam Spr18 Soln PDFDocument45 pagesCs230exam Spr18 Soln PDFMOHAMMAD100% (1)
- Assignment 2 SpecificationDocument3 pagesAssignment 2 SpecificationRazinNo ratings yet
- SKL PatternDocument66 pagesSKL Patternniladri47530No ratings yet
- DL - Assignment 8 SolutionDocument6 pagesDL - Assignment 8 Solutionswathisreejith6100% (1)
- 1 RegressionDocument4 pages1 RegressionAgustin AgustinNo ratings yet
- HW 3Document5 pagesHW 3AbbasNo ratings yet
- Homework Exercise 4: Statistical Learning, Fall 2020-21Document3 pagesHomework Exercise 4: Statistical Learning, Fall 2020-21Elinor RahamimNo ratings yet
- Lecture 2: Introduction To PytorchDocument7 pagesLecture 2: Introduction To PytorchNilesh ChaudharyNo ratings yet
- LFD 2005 Nearest NeighbourDocument6 pagesLFD 2005 Nearest NeighbourAnahi SánchezNo ratings yet
- Ghost CellsDocument16 pagesGhost CellstrolldokiNo ratings yet
- Cloudsvm: Training An SVM Classifier in Cloud Computing SystemsDocument13 pagesCloudsvm: Training An SVM Classifier in Cloud Computing SystemssfarithaNo ratings yet
- (COMP5214) (2021) (S) Midterm Cmu63l 15021Document9 pages(COMP5214) (2021) (S) Midterm Cmu63l 15021ferdyNo ratings yet
- DSCI 303: Machine Learning For Data Science Fall 2020Document5 pagesDSCI 303: Machine Learning For Data Science Fall 2020Anonymous StudentNo ratings yet
- HW 7Document4 pagesHW 7adithya604No ratings yet
- Artigo SmallexDocument17 pagesArtigo SmallexWill CorleoneNo ratings yet
- Exercise 7 Submission Group 12Document22 pagesExercise 7 Submission Group 12Mehmet YalçınNo ratings yet
- Support Vector Machines: The Interface To Libsvm in Package E1071 by David Meyer FH Technikum Wien, AustriaDocument8 pagesSupport Vector Machines: The Interface To Libsvm in Package E1071 by David Meyer FH Technikum Wien, AustriaDoom Head 47No ratings yet
- 12s MidI - SampleExam Print1Document8 pages12s MidI - SampleExam Print1Divya GnNo ratings yet
- Support Vector Machines: The Interface To Libsvm in Package E1071 by David Meyer FH Technikum Wien, AustriaDocument8 pagesSupport Vector Machines: The Interface To Libsvm in Package E1071 by David Meyer FH Technikum Wien, AustriaAmish SharmaNo ratings yet
- Injecting Knowledge Into The Solution of The Two-Spiral ProblemDocument8 pagesInjecting Knowledge Into The Solution of The Two-Spiral ProblemJavierNo ratings yet
- Another Introduction SVMDocument4 pagesAnother Introduction SVMisma_shadyNo ratings yet
- A Probabilistic Theory of Deep Learning: Unit 2Document17 pagesA Probabilistic Theory of Deep Learning: Unit 2HarshitNo ratings yet
- Lecture 2: Basics and Definitions: Networks As Data ModelsDocument28 pagesLecture 2: Basics and Definitions: Networks As Data ModelsshardapatelNo ratings yet
- MidtermDocument12 pagesMidtermEman AsemNo ratings yet
- Pattern Classification of Back-Propagation Algorithm Using Exclusive Connecting NetworkDocument5 pagesPattern Classification of Back-Propagation Algorithm Using Exclusive Connecting NetworkEkin RafiaiNo ratings yet
- 2806 Neural Computation Committee Machines: 2005 Ari VisaDocument30 pages2806 Neural Computation Committee Machines: 2005 Ari VisaKhaireCrNo ratings yet
- Laude 2018 Discrete ContinuousDocument13 pagesLaude 2018 Discrete ContinuousswagmanswagNo ratings yet
- Convolutional Neural Network TutorialDocument8 pagesConvolutional Neural Network TutorialGiri PrakashNo ratings yet
- Anthony Kuh - Neural Networks and Learning TheoryDocument72 pagesAnthony Kuh - Neural Networks and Learning TheoryTuhmaNo ratings yet
- Chapter 3Document7 pagesChapter 3pavithrNo ratings yet
- SvmdocDocument8 pagesSvmdocEZ112No ratings yet
- Exercise 03Document5 pagesExercise 03gfjggNo ratings yet
- An Introduction To Neural Networks: Instituto Tecgraf PUC-Rio Nome: Fernanda Duarte Orientador: Marcelo GattassDocument45 pagesAn Introduction To Neural Networks: Instituto Tecgraf PUC-Rio Nome: Fernanda Duarte Orientador: Marcelo GattassGiGa GFNo ratings yet
- COMP3308/COMP3608 Artificial Intelligence Week 10 Tutorial Exercises Support Vector Machines. Ensembles of ClassifiersDocument3 pagesCOMP3308/COMP3608 Artificial Intelligence Week 10 Tutorial Exercises Support Vector Machines. Ensembles of ClassifiersharietNo ratings yet
- Autoencoder Assignment PDFDocument5 pagesAutoencoder Assignment PDFpraveen kandulaNo ratings yet
- BackpropagationDocument8 pagesBackpropagationnigel989No ratings yet
- cs188 sp23 Note25Document8 pagescs188 sp23 Note25sondosNo ratings yet
- Final SolDocument14 pagesFinal SolAndrow ShonodaNo ratings yet
- E9 205 - Machine Learning For Signal ProcessingDocument3 pagesE9 205 - Machine Learning For Signal Processingrishi guptaNo ratings yet
- SVM Basics PaperDocument7 pagesSVM Basics PaperMohitRajputNo ratings yet
- W9a Autoencoders PcaDocument7 pagesW9a Autoencoders PcazeliawillscumbergNo ratings yet
- SvmdocDocument8 pagesSvmdocRuddy Caja P.No ratings yet
- ML_UNIT -2Document13 pagesML_UNIT -2Dr D S Naga Malleswara RaoNo ratings yet
- IN5400 - Machine Learning For Image AnalysisDocument6 pagesIN5400 - Machine Learning For Image AnalysisJohanne SaxegaardNo ratings yet
- articolo_roma_limite_16_pagine-98fce45e-7fab-4687-a4f9-ef291abda859 (3)Document3 pagesarticolo_roma_limite_16_pagine-98fce45e-7fab-4687-a4f9-ef291abda859 (3)roberto bruzzeseNo ratings yet
- Lab NN KNN SVMDocument13 pagesLab NN KNN SVMmaaian.iancuNo ratings yet
- Assignment 3 (Sol.) : Introduction To Machine Learning Prof. B. RavindranDocument8 pagesAssignment 3 (Sol.) : Introduction To Machine Learning Prof. B. RavindranThrilling MeherabNo ratings yet
- Chapter 2 - SVM (Support Vector Machine) - Theory - Machine Learning 101 - MediumDocument9 pagesChapter 2 - SVM (Support Vector Machine) - Theory - Machine Learning 101 - MediumSabha NayaghamNo ratings yet
- cs230exam_win21Document21 pagescs230exam_win21toluei.s29No ratings yet
- SVM - Hype or HallelujahDocument13 pagesSVM - Hype or HallelujahVaibhav JainNo ratings yet
- Gradient Descent AlgorithmDocument5 pagesGradient Descent AlgorithmravinyseNo ratings yet
- Backpropagation: Fundamentals and Applications for Preparing Data for Training in Deep LearningFrom EverandBackpropagation: Fundamentals and Applications for Preparing Data for Training in Deep LearningNo ratings yet
- UMB PulserDocument28 pagesUMB PulserJesus RodriguezNo ratings yet
- Slide Closing Verge AAD Surabaya Batch 1 - Session 6Document19 pagesSlide Closing Verge AAD Surabaya Batch 1 - Session 6Hans NovriyantoNo ratings yet
- TLE4997E2: Programmable Linear Hall SensorDocument34 pagesTLE4997E2: Programmable Linear Hall SensortanmaysutariaNo ratings yet
- Section 1 General Introduction To VibrationDocument38 pagesSection 1 General Introduction To Vibrationsudhiruday31No ratings yet
- Unit 3 Video: Citizen Scientists: Dr. Fredrik HiebertDocument1 pageUnit 3 Video: Citizen Scientists: Dr. Fredrik HiebertThanh ĐỗNo ratings yet
- LTE WP WorkingDocument7 pagesLTE WP WorkingMuhammad Iqbal Khan SonNo ratings yet
- Renesas Flexible Software Package (FSP) v410 User ManualDocument4,346 pagesRenesas Flexible Software Package (FSP) v410 User Manualmar_barudjNo ratings yet
- ORGANIZATIONAL CULTURE Organizational Culture and Leadership, 3rd EditionDocument458 pagesORGANIZATIONAL CULTURE Organizational Culture and Leadership, 3rd Editionrisda islamiyah100% (1)
- Kansas City Red Book: April 2009, Volume: 1, Issue 6Document72 pagesKansas City Red Book: April 2009, Volume: 1, Issue 6kcredbook100% (3)
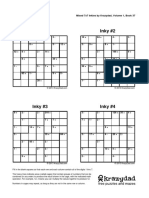
- 7x Inky Puzzles by KrazyDad Book 37Document3 pages7x Inky Puzzles by KrazyDad Book 37jessyNo ratings yet
- PLC Instruction ListDocument4 pagesPLC Instruction ListPrestoneKNo ratings yet
- Osmobsc Vty ReferenceDocument272 pagesOsmobsc Vty Referencelong leeNo ratings yet
- B.M. Rakibul HasanDocument2 pagesB.M. Rakibul HasanGEAR Travel LtdNo ratings yet
- Kobiawa's Degree ProjectDocument70 pagesKobiawa's Degree ProjectNana AmaNo ratings yet
- BethINI Readme UTF-8Document3 pagesBethINI Readme UTF-8SB CapNo ratings yet
- NSK Tools CatalogDocument20 pagesNSK Tools CatalogRobert OrtegaNo ratings yet
- MechanizationDocument9 pagesMechanizationHoney de la TorreNo ratings yet
- Features Include: High Pressure Gear Pump (HGP)Document2 pagesFeatures Include: High Pressure Gear Pump (HGP)Nitin ShenoyNo ratings yet
- Corporate H ScriDocument4 pagesCorporate H ScriHGL ConsultingNo ratings yet
- (MAI 1.16) EIGENVALUES - EIGENVECTORS - SolutionsDocument4 pages(MAI 1.16) EIGENVALUES - EIGENVECTORS - SolutionsNhu Quynh NguyenNo ratings yet
- Computer Science SyllabusDocument15 pagesComputer Science SyllabussatanNo ratings yet
- PT Antesena Geosurvey Indonesia: "Your Partner in Managing Subsurface Risk"Document26 pagesPT Antesena Geosurvey Indonesia: "Your Partner in Managing Subsurface Risk"Fauzia RizkyNo ratings yet
- Word Prediction Using Trie Data Structure: J Component Project ReportDocument81 pagesWord Prediction Using Trie Data Structure: J Component Project ReportSPANDAN KUMARNo ratings yet
- Logic Shift and Rotate InstructionsDocument32 pagesLogic Shift and Rotate InstructionsMd Mahfuz AhmedNo ratings yet
- Crouzet Millenium - Mascable Programming CableDocument2 pagesCrouzet Millenium - Mascable Programming CableFeras AdvertisementsNo ratings yet
- Different Types of Commands in SQLDocument3 pagesDifferent Types of Commands in SQLAbhishek DasNo ratings yet
- Career Change To Administrative Assistant Cover LetterDocument9 pagesCareer Change To Administrative Assistant Cover Letterbcqxqha3100% (1)
- Introduction To Human Computer Interaction PQ1-PQ2Document12 pagesIntroduction To Human Computer Interaction PQ1-PQ2CedNo ratings yet