
J2 (Int) - Artificial Reefs As Shoreline Protection PDF
J2 (Int) - Artificial Reefs As Shoreline Protection PDF
You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5823)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1093)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (852)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (590)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (898)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (541)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (349)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (823)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (403)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Time To Start Is Now: How Implementing Natural Infrastructure Solutions Can Improve and Protect Our CoastsDocument4 pagesThe Time To Start Is Now: How Implementing Natural Infrastructure Solutions Can Improve and Protect Our CoastsEnvironmental Defense Fund (Documents)79% (183)
- Aqaba LPG Terminal JordanDocument21 pagesAqaba LPG Terminal JordanHaryo ArmonoNo ratings yet
- Poruma Sea Wall Feasbility StudyDocument39 pagesPoruma Sea Wall Feasbility StudyGauri 'tika' KartikaNo ratings yet
- Tips and Trick in MS Word: 1. Numbering Turns Black Box. How To Fixed It?Document1 pageTips and Trick in MS Word: 1. Numbering Turns Black Box. How To Fixed It?Haryo ArmonoNo ratings yet
- Create BLN FileDocument2 pagesCreate BLN FileHaryo ArmonoNo ratings yet
- Stability Prediction On Armor Blocks For Submerged Breakwater by Computational Fluid DynamicsDocument14 pagesStability Prediction On Armor Blocks For Submerged Breakwater by Computational Fluid DynamicsHaryo ArmonoNo ratings yet
- Pengaruh Kemiringan Dan Susunan Kantong Terhadap Stabilitas Pemecah Gelombang Tipe Kantong Pasir Bentuk BantalDocument7 pagesPengaruh Kemiringan Dan Susunan Kantong Terhadap Stabilitas Pemecah Gelombang Tipe Kantong Pasir Bentuk BantalHaryo ArmonoNo ratings yet
- Inception Report - Studi Transprtasi Dan Logistik KilangDocument38 pagesInception Report - Studi Transprtasi Dan Logistik KilangHaryo ArmonoNo ratings yet
- Hydraulic Behaviour of Submerged Breakwa PDFDocument10 pagesHydraulic Behaviour of Submerged Breakwa PDFHaryo ArmonoNo ratings yet
- Classification of Soil-150804095426-Lva1-App6892 PDFDocument23 pagesClassification of Soil-150804095426-Lva1-App6892 PDFHaryo ArmonoNo ratings yet
- Selasa, 13 Desember 2011 Jurusan Teknik Kelautan Ftk-Its Surabaya 2011Document14 pagesSelasa, 13 Desember 2011 Jurusan Teknik Kelautan Ftk-Its Surabaya 2011Haryo ArmonoNo ratings yet
- Analysis of Mean Velocity and Turbulence Measurements With AdcpsDocument15 pagesAnalysis of Mean Velocity and Turbulence Measurements With AdcpsHaryo ArmonoNo ratings yet
- Vestamid L Polyamide 12 - EvonikDocument12 pagesVestamid L Polyamide 12 - EvonikHaryo Armono100% (1)
- CFD For Hydraulic StructuresDocument37 pagesCFD For Hydraulic StructuresHaryo ArmonoNo ratings yet
- BW Design ExampleDocument17 pagesBW Design ExampleHaryo ArmonoNo ratings yet
- Soft Eng Techniques For Coastal ProtectionDocument49 pagesSoft Eng Techniques For Coastal ProtectionHaryo ArmonoNo ratings yet
- Holderness Case StudyDocument9 pagesHolderness Case StudyJamyma-May HansonNo ratings yet
- Beach Profile Log SheetDocument2 pagesBeach Profile Log SheetThe Science Exchange International Sea Turtle InternshipsNo ratings yet
- Tsunamis in Ancient SpainDocument6 pagesTsunamis in Ancient SpainClay PetersonNo ratings yet
- Maldives MapDocument2 pagesMaldives MapIbrahim ZareerNo ratings yet
- CatalogoDocument69 pagesCatalogoFrancoNo ratings yet
- River and Coastal Structure PDFDocument42 pagesRiver and Coastal Structure PDFIgnacio Jr. Paguyo100% (3)
- Terms Related To Docks and HarboursDocument7 pagesTerms Related To Docks and Harboursحاجى صاحبNo ratings yet
- Yakim ICTDocument14 pagesYakim ICTShaira Sanchez BucioNo ratings yet
- RS 02Document1 pageRS 02cimpstazNo ratings yet
- Answers For Past Papers On Coasts Up To June 2010Document16 pagesAnswers For Past Papers On Coasts Up To June 2010teeeNo ratings yet
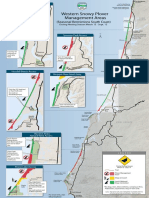
- Western Snowy Plover Management Areas: (Seasonal Restrictions South Coast)Document1 pageWestern Snowy Plover Management Areas: (Seasonal Restrictions South Coast)Sinclair Broadcast Group - EugeneNo ratings yet
- Engr. Eric C. CruzDocument5 pagesEngr. Eric C. CruzJun KhoNo ratings yet
- Marine Processes: Erosion Such As Cliff S, Wave-Cut Platforms, Caves, Arches, StacksDocument23 pagesMarine Processes: Erosion Such As Cliff S, Wave-Cut Platforms, Caves, Arches, StacksFozia ShaikhNo ratings yet
- SR443 Waves Forces Vertical Composite Breakwaters HRWallingfordDocument116 pagesSR443 Waves Forces Vertical Composite Breakwaters HRWallingfordphilou6259No ratings yet
- Midterm For Logistics Managment 2023-2024Document4 pagesMidterm For Logistics Managment 2023-2024vietanh160903No ratings yet
- Design Vertical BreakwaterDocument110 pagesDesign Vertical Breakwaterlamkinpark3373100% (2)
- IHD402 Harbour and Coastal Engineering: Prof. Sawsan Eissa أ. د - ىسيع نسوسDocument18 pagesIHD402 Harbour and Coastal Engineering: Prof. Sawsan Eissa أ. د - ىسيع نسوسMustafa ArafaNo ratings yet
- Sea Level Changes or EustatismDocument6 pagesSea Level Changes or Eustatismkalule elvisNo ratings yet
- Port Coogee Coastal Monitoring - D HamiltonDocument18 pagesPort Coogee Coastal Monitoring - D HamiltondanNo ratings yet
- 2 Planning PF Coastal Protection Measures Along Kerala CoastDocument209 pages2 Planning PF Coastal Protection Measures Along Kerala CoastVarsha RanganathaNo ratings yet
- Blue Flag BeachesDocument4 pagesBlue Flag Beachespilgrim13No ratings yet
- Yr 10 WK 6 Wed Worksheet Modified Coastal Environments WorksheetDocument11 pagesYr 10 WK 6 Wed Worksheet Modified Coastal Environments Worksheetapi-318420698No ratings yet
- List of Major Straits Geography Notes For UPSCDocument2 pagesList of Major Straits Geography Notes For UPSCSudhansu pandaNo ratings yet
- Geological Work of Oceans and SeasDocument48 pagesGeological Work of Oceans and SeasAbhinav Kalathiparambil75% (4)
- 3 DredgingDocument32 pages3 DredgingMohamed SemedaNo ratings yet
- Port List CDocument96 pagesPort List CStefanescu EduardNo ratings yet
- Jurnal Organisme Intertidal PDFDocument8 pagesJurnal Organisme Intertidal PDFiit. ibraNo ratings yet
- Government of India Central Water CommissionDocument58 pagesGovernment of India Central Water CommissionMahdi FekiNo ratings yet




















































































Download as pdf or txt
You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5823)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1093)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (852)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (590)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (898)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (541)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (349)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (823)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (403)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Time To Start Is Now: How Implementing Natural Infrastructure Solutions Can Improve and Protect Our CoastsDocument4 pagesThe Time To Start Is Now: How Implementing Natural Infrastructure Solutions Can Improve and Protect Our CoastsEnvironmental Defense Fund (Documents)79% (183)
- Aqaba LPG Terminal JordanDocument21 pagesAqaba LPG Terminal JordanHaryo ArmonoNo ratings yet
- Poruma Sea Wall Feasbility StudyDocument39 pagesPoruma Sea Wall Feasbility StudyGauri 'tika' KartikaNo ratings yet
- Tips and Trick in MS Word: 1. Numbering Turns Black Box. How To Fixed It?Document1 pageTips and Trick in MS Word: 1. Numbering Turns Black Box. How To Fixed It?Haryo ArmonoNo ratings yet
- Create BLN FileDocument2 pagesCreate BLN FileHaryo ArmonoNo ratings yet
- Stability Prediction On Armor Blocks For Submerged Breakwater by Computational Fluid DynamicsDocument14 pagesStability Prediction On Armor Blocks For Submerged Breakwater by Computational Fluid DynamicsHaryo ArmonoNo ratings yet
- Pengaruh Kemiringan Dan Susunan Kantong Terhadap Stabilitas Pemecah Gelombang Tipe Kantong Pasir Bentuk BantalDocument7 pagesPengaruh Kemiringan Dan Susunan Kantong Terhadap Stabilitas Pemecah Gelombang Tipe Kantong Pasir Bentuk BantalHaryo ArmonoNo ratings yet
- Inception Report - Studi Transprtasi Dan Logistik KilangDocument38 pagesInception Report - Studi Transprtasi Dan Logistik KilangHaryo ArmonoNo ratings yet
- Hydraulic Behaviour of Submerged Breakwa PDFDocument10 pagesHydraulic Behaviour of Submerged Breakwa PDFHaryo ArmonoNo ratings yet
- Classification of Soil-150804095426-Lva1-App6892 PDFDocument23 pagesClassification of Soil-150804095426-Lva1-App6892 PDFHaryo ArmonoNo ratings yet
- Selasa, 13 Desember 2011 Jurusan Teknik Kelautan Ftk-Its Surabaya 2011Document14 pagesSelasa, 13 Desember 2011 Jurusan Teknik Kelautan Ftk-Its Surabaya 2011Haryo ArmonoNo ratings yet
- Analysis of Mean Velocity and Turbulence Measurements With AdcpsDocument15 pagesAnalysis of Mean Velocity and Turbulence Measurements With AdcpsHaryo ArmonoNo ratings yet
- Vestamid L Polyamide 12 - EvonikDocument12 pagesVestamid L Polyamide 12 - EvonikHaryo Armono100% (1)
- CFD For Hydraulic StructuresDocument37 pagesCFD For Hydraulic StructuresHaryo ArmonoNo ratings yet
- BW Design ExampleDocument17 pagesBW Design ExampleHaryo ArmonoNo ratings yet
- Soft Eng Techniques For Coastal ProtectionDocument49 pagesSoft Eng Techniques For Coastal ProtectionHaryo ArmonoNo ratings yet
- Holderness Case StudyDocument9 pagesHolderness Case StudyJamyma-May HansonNo ratings yet
- Beach Profile Log SheetDocument2 pagesBeach Profile Log SheetThe Science Exchange International Sea Turtle InternshipsNo ratings yet
- Tsunamis in Ancient SpainDocument6 pagesTsunamis in Ancient SpainClay PetersonNo ratings yet
- Maldives MapDocument2 pagesMaldives MapIbrahim ZareerNo ratings yet
- CatalogoDocument69 pagesCatalogoFrancoNo ratings yet
- River and Coastal Structure PDFDocument42 pagesRiver and Coastal Structure PDFIgnacio Jr. Paguyo100% (3)
- Terms Related To Docks and HarboursDocument7 pagesTerms Related To Docks and Harboursحاجى صاحبNo ratings yet
- Yakim ICTDocument14 pagesYakim ICTShaira Sanchez BucioNo ratings yet
- RS 02Document1 pageRS 02cimpstazNo ratings yet
- Answers For Past Papers On Coasts Up To June 2010Document16 pagesAnswers For Past Papers On Coasts Up To June 2010teeeNo ratings yet
- Western Snowy Plover Management Areas: (Seasonal Restrictions South Coast)Document1 pageWestern Snowy Plover Management Areas: (Seasonal Restrictions South Coast)Sinclair Broadcast Group - EugeneNo ratings yet
- Engr. Eric C. CruzDocument5 pagesEngr. Eric C. CruzJun KhoNo ratings yet
- Marine Processes: Erosion Such As Cliff S, Wave-Cut Platforms, Caves, Arches, StacksDocument23 pagesMarine Processes: Erosion Such As Cliff S, Wave-Cut Platforms, Caves, Arches, StacksFozia ShaikhNo ratings yet
- SR443 Waves Forces Vertical Composite Breakwaters HRWallingfordDocument116 pagesSR443 Waves Forces Vertical Composite Breakwaters HRWallingfordphilou6259No ratings yet
- Midterm For Logistics Managment 2023-2024Document4 pagesMidterm For Logistics Managment 2023-2024vietanh160903No ratings yet
- Design Vertical BreakwaterDocument110 pagesDesign Vertical Breakwaterlamkinpark3373100% (2)
- IHD402 Harbour and Coastal Engineering: Prof. Sawsan Eissa أ. د - ىسيع نسوسDocument18 pagesIHD402 Harbour and Coastal Engineering: Prof. Sawsan Eissa أ. د - ىسيع نسوسMustafa ArafaNo ratings yet
- Sea Level Changes or EustatismDocument6 pagesSea Level Changes or Eustatismkalule elvisNo ratings yet
- Port Coogee Coastal Monitoring - D HamiltonDocument18 pagesPort Coogee Coastal Monitoring - D HamiltondanNo ratings yet
- 2 Planning PF Coastal Protection Measures Along Kerala CoastDocument209 pages2 Planning PF Coastal Protection Measures Along Kerala CoastVarsha RanganathaNo ratings yet
- Blue Flag BeachesDocument4 pagesBlue Flag Beachespilgrim13No ratings yet
- Yr 10 WK 6 Wed Worksheet Modified Coastal Environments WorksheetDocument11 pagesYr 10 WK 6 Wed Worksheet Modified Coastal Environments Worksheetapi-318420698No ratings yet
- List of Major Straits Geography Notes For UPSCDocument2 pagesList of Major Straits Geography Notes For UPSCSudhansu pandaNo ratings yet
- Geological Work of Oceans and SeasDocument48 pagesGeological Work of Oceans and SeasAbhinav Kalathiparambil75% (4)
- 3 DredgingDocument32 pages3 DredgingMohamed SemedaNo ratings yet
- Port List CDocument96 pagesPort List CStefanescu EduardNo ratings yet
- Jurnal Organisme Intertidal PDFDocument8 pagesJurnal Organisme Intertidal PDFiit. ibraNo ratings yet
- Government of India Central Water CommissionDocument58 pagesGovernment of India Central Water CommissionMahdi FekiNo ratings yet