
2012tempelmandwaikatspitasexperientaldrop Impact PDF
2012tempelmandwaikatspitasexperientaldrop Impact PDF
You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5820)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1093)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (845)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (590)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (898)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (540)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (349)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (822)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (401)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- College Algebra by Paul Rider PDF Free 30l PDFDocument4 pagesCollege Algebra by Paul Rider PDF Free 30l PDFMonica100% (1)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Solid State Physics: Phonon Heat CapacityDocument25 pagesSolid State Physics: Phonon Heat CapacityGetachew YirgaNo ratings yet
- Crosby® Grade 100 SHUR-LOC® HooksDocument1 pageCrosby® Grade 100 SHUR-LOC® HooksleoNo ratings yet
- Charge-to-Mass Ratio of An Electron: Phys211LDocument7 pagesCharge-to-Mass Ratio of An Electron: Phys211LElias HannaNo ratings yet
- Parabola DesignerDocument9 pagesParabola DesignerFaisal BashirNo ratings yet
- SLK - Sci7 - Q4 - Week 6Document12 pagesSLK - Sci7 - Q4 - Week 6malouNo ratings yet
- Mud Viscosity and RhelogyDocument8 pagesMud Viscosity and RhelogyHafizszul FeyzulNo ratings yet
- Modelling The Eruptive Young Stellar Object Re 50 N Irs 1 With ProdimoDocument11 pagesModelling The Eruptive Young Stellar Object Re 50 N Irs 1 With Prodimogabrielaugusto83.gadssNo ratings yet
- Beta ProsesDocument4 pagesBeta ProsesDoni TabrNo ratings yet
- FootingsDocument13 pagesFootingsvivek krishna chinthakrindiNo ratings yet
- Cement and Concrete Research: Konstantin Kovler, Nicolas RousselDocument18 pagesCement and Concrete Research: Konstantin Kovler, Nicolas RousselE Hammam El MissiryNo ratings yet
- VectorsDocument34 pagesVectorsaryamamanNo ratings yet
- Thermal Engineering-I Course Code: 4341905Document11 pagesThermal Engineering-I Course Code: 4341905Gest Account 08No ratings yet
- ICP-OES Avio 220 Max ICP-OES SpecificationsDocument2 pagesICP-OES Avio 220 Max ICP-OES SpecificationsUswatul HasanahNo ratings yet
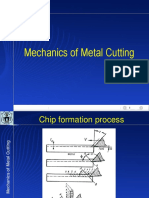
- Mechanics of Metal CuttingDocument47 pagesMechanics of Metal CuttingSasi ReddyNo ratings yet
- 14.08.22 - OSR - STAR CO-SC - Jee - Adv - 2021 - P1 - GTA-11 (P1) - QPDocument19 pages14.08.22 - OSR - STAR CO-SC - Jee - Adv - 2021 - P1 - GTA-11 (P1) - QPPratyek ThumulaNo ratings yet
- Rdso Weld NotesDocument18 pagesRdso Weld Notesvidya nareshNo ratings yet
- Physics Class12 Project Report Cbse 2020 2021 On Topic Ac GeneratorDocument16 pagesPhysics Class12 Project Report Cbse 2020 2021 On Topic Ac Generatoruselessf97No ratings yet
- Acsee Physics f5 t4 PropertiesofmatterDocument8 pagesAcsee Physics f5 t4 Propertiesofmatternassorussi9No ratings yet
- Gear DesignDocument37 pagesGear DesignAayush ShahNo ratings yet
- Unlocking The Secrets of The Universe PDFDocument37 pagesUnlocking The Secrets of The Universe PDFMacleo BanalNo ratings yet
- GS3 Parts Catalog V3.4 ColorDocument78 pagesGS3 Parts Catalog V3.4 ColoryossiatNo ratings yet
- Lecture 5Document10 pagesLecture 5navrajk022No ratings yet
- Lecture Electromagnetic WavesDocument14 pagesLecture Electromagnetic WavesBill WhiteNo ratings yet
- Effect of Compression On T H E Shear Modulus of Rubber: of of of of of of ofDocument3 pagesEffect of Compression On T H E Shear Modulus of Rubber: of of of of of of ofstefan.vince536No ratings yet
- Test 5 - MLK - GBS - Ques&AnsDocument10 pagesTest 5 - MLK - GBS - Ques&AnsLIM YEE WEN MoeNo ratings yet
- Determination of Performance Degradation of A Marine Diesel Engine by Using Curve Based ApproachDocument30 pagesDetermination of Performance Degradation of A Marine Diesel Engine by Using Curve Based ApproachDhanaNo ratings yet
- UntitledDocument59 pagesUntitledThamarai SNo ratings yet
- Jimma University, Jit Faculty of Mechanical Engineering: Machinery Design, (Meng 5303)Document52 pagesJimma University, Jit Faculty of Mechanical Engineering: Machinery Design, (Meng 5303)Ephraim MekonnenNo ratings yet
- Performance Prediction of Niger Delta Reservoir BUZA Using Allocation ToolDocument7 pagesPerformance Prediction of Niger Delta Reservoir BUZA Using Allocation TooljuanfernandoNo ratings yet





































































Download as pdf or txt
You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5820)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1093)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (845)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (590)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (898)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (540)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (349)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (822)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (401)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- College Algebra by Paul Rider PDF Free 30l PDFDocument4 pagesCollege Algebra by Paul Rider PDF Free 30l PDFMonica100% (1)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Solid State Physics: Phonon Heat CapacityDocument25 pagesSolid State Physics: Phonon Heat CapacityGetachew YirgaNo ratings yet
- Crosby® Grade 100 SHUR-LOC® HooksDocument1 pageCrosby® Grade 100 SHUR-LOC® HooksleoNo ratings yet
- Charge-to-Mass Ratio of An Electron: Phys211LDocument7 pagesCharge-to-Mass Ratio of An Electron: Phys211LElias HannaNo ratings yet
- Parabola DesignerDocument9 pagesParabola DesignerFaisal BashirNo ratings yet
- SLK - Sci7 - Q4 - Week 6Document12 pagesSLK - Sci7 - Q4 - Week 6malouNo ratings yet
- Mud Viscosity and RhelogyDocument8 pagesMud Viscosity and RhelogyHafizszul FeyzulNo ratings yet
- Modelling The Eruptive Young Stellar Object Re 50 N Irs 1 With ProdimoDocument11 pagesModelling The Eruptive Young Stellar Object Re 50 N Irs 1 With Prodimogabrielaugusto83.gadssNo ratings yet
- Beta ProsesDocument4 pagesBeta ProsesDoni TabrNo ratings yet
- FootingsDocument13 pagesFootingsvivek krishna chinthakrindiNo ratings yet
- Cement and Concrete Research: Konstantin Kovler, Nicolas RousselDocument18 pagesCement and Concrete Research: Konstantin Kovler, Nicolas RousselE Hammam El MissiryNo ratings yet
- VectorsDocument34 pagesVectorsaryamamanNo ratings yet
- Thermal Engineering-I Course Code: 4341905Document11 pagesThermal Engineering-I Course Code: 4341905Gest Account 08No ratings yet
- ICP-OES Avio 220 Max ICP-OES SpecificationsDocument2 pagesICP-OES Avio 220 Max ICP-OES SpecificationsUswatul HasanahNo ratings yet
- Mechanics of Metal CuttingDocument47 pagesMechanics of Metal CuttingSasi ReddyNo ratings yet
- 14.08.22 - OSR - STAR CO-SC - Jee - Adv - 2021 - P1 - GTA-11 (P1) - QPDocument19 pages14.08.22 - OSR - STAR CO-SC - Jee - Adv - 2021 - P1 - GTA-11 (P1) - QPPratyek ThumulaNo ratings yet
- Rdso Weld NotesDocument18 pagesRdso Weld Notesvidya nareshNo ratings yet
- Physics Class12 Project Report Cbse 2020 2021 On Topic Ac GeneratorDocument16 pagesPhysics Class12 Project Report Cbse 2020 2021 On Topic Ac Generatoruselessf97No ratings yet
- Acsee Physics f5 t4 PropertiesofmatterDocument8 pagesAcsee Physics f5 t4 Propertiesofmatternassorussi9No ratings yet
- Gear DesignDocument37 pagesGear DesignAayush ShahNo ratings yet
- Unlocking The Secrets of The Universe PDFDocument37 pagesUnlocking The Secrets of The Universe PDFMacleo BanalNo ratings yet
- GS3 Parts Catalog V3.4 ColorDocument78 pagesGS3 Parts Catalog V3.4 ColoryossiatNo ratings yet
- Lecture 5Document10 pagesLecture 5navrajk022No ratings yet
- Lecture Electromagnetic WavesDocument14 pagesLecture Electromagnetic WavesBill WhiteNo ratings yet
- Effect of Compression On T H E Shear Modulus of Rubber: of of of of of of ofDocument3 pagesEffect of Compression On T H E Shear Modulus of Rubber: of of of of of of ofstefan.vince536No ratings yet
- Test 5 - MLK - GBS - Ques&AnsDocument10 pagesTest 5 - MLK - GBS - Ques&AnsLIM YEE WEN MoeNo ratings yet
- Determination of Performance Degradation of A Marine Diesel Engine by Using Curve Based ApproachDocument30 pagesDetermination of Performance Degradation of A Marine Diesel Engine by Using Curve Based ApproachDhanaNo ratings yet
- UntitledDocument59 pagesUntitledThamarai SNo ratings yet
- Jimma University, Jit Faculty of Mechanical Engineering: Machinery Design, (Meng 5303)Document52 pagesJimma University, Jit Faculty of Mechanical Engineering: Machinery Design, (Meng 5303)Ephraim MekonnenNo ratings yet
- Performance Prediction of Niger Delta Reservoir BUZA Using Allocation ToolDocument7 pagesPerformance Prediction of Niger Delta Reservoir BUZA Using Allocation TooljuanfernandoNo ratings yet