Download as pdf or txt
You might also like
- National Transmission & Despatch Company (NTDC) Limited Pakistan High Voltage and Short Circuit Lab, RawatDocument16 pagesNational Transmission & Despatch Company (NTDC) Limited Pakistan High Voltage and Short Circuit Lab, RawatAhmad Ali0% (1)
- Study of a reluctance magnetic gearbox for energy storage system applicationFrom EverandStudy of a reluctance magnetic gearbox for energy storage system applicationRating: 1 out of 5 stars1/5 (1)
- Electric BrakingDocument28 pagesElectric BrakingSabir BanvaNo ratings yet
- Cha 2Document52 pagesCha 2yaredNo ratings yet
- Machine AssignmentDocument10 pagesMachine AssignmentAnonymous DfaS5nSimJNo ratings yet
- Machine Assignment IeslceDocument10 pagesMachine Assignment IeslcePasindu PereraNo ratings yet
- Multi Quadrant Operation Multi Quadrant Operation: Lecture-6Document6 pagesMulti Quadrant Operation Multi Quadrant Operation: Lecture-6Haripriya PalemNo ratings yet
- Application of 4-Quadrant DC Drives in Two Selected SystemsDocument10 pagesApplication of 4-Quadrant DC Drives in Two Selected SystemsAnonymous DfaS5nSimJNo ratings yet
- Application of 4-Quadrant DC Drives in Two Selected SystemsDocument10 pagesApplication of 4-Quadrant DC Drives in Two Selected SystemsPasindu PereraNo ratings yet
- Eee-Vii-Industrial Drives and Applications (10ee74) - SolutionDocument54 pagesEee-Vii-Industrial Drives and Applications (10ee74) - SolutionAmit KumarNo ratings yet
- S K Pillai Sample ChapterDocument19 pagesS K Pillai Sample ChapterDrVikas Singh BhadoriaNo ratings yet
- Motor Selection GuideDocument55 pagesMotor Selection GuideElafanNo ratings yet
- 2.dynamics of Electrical DrivesDocument47 pages2.dynamics of Electrical DrivesSimbarashe ChitsungeNo ratings yet
- 108 Ed&cDocument58 pages108 Ed&cSukma SanjayaNo ratings yet
- EE62-ia-1 KeyDocument19 pagesEE62-ia-1 KeyBala SubramanianNo ratings yet
- Chapter TwoDocument69 pagesChapter Twotebelayhabitamu12No ratings yet
- Mechanical Load: Classification of Load Torque: A) Active Load Torque B) Passive Load TorqueDocument29 pagesMechanical Load: Classification of Load Torque: A) Active Load Torque B) Passive Load TorqueIndira RawatNo ratings yet
- Basics of Regenerative BrakingDocument2 pagesBasics of Regenerative BrakingsatyakishoreakulaNo ratings yet
- Unit2 EDCDocument21 pagesUnit2 EDCKarthick Sivakumar ChellamuthuNo ratings yet
- Utilization of Electrical Energy: Chapter 2: Electric Drives L-2-1Document23 pagesUtilization of Electrical Energy: Chapter 2: Electric Drives L-2-1Frozen BoyNo ratings yet
- Dynamic of Electric Drives: by Dr. P.K Biswas Asst. Professor Department of Electrical Engineering NIT MizoramDocument21 pagesDynamic of Electric Drives: by Dr. P.K Biswas Asst. Professor Department of Electrical Engineering NIT MizoramtoshaliNo ratings yet
- Four Quadrant Operation of Any MotorDocument3 pagesFour Quadrant Operation of Any MotorChintanNo ratings yet
- Speed Torque Conventions and Multi Quadrant OperationDocument2 pagesSpeed Torque Conventions and Multi Quadrant OperationAglet100% (1)
- Lecture-8: Modes of OperationDocument4 pagesLecture-8: Modes of OperationVasavi VaasuNo ratings yet
- PKP ED NOTE Module1 FinalDocument66 pagesPKP ED NOTE Module1 FinalSamarjit SenNo ratings yet
- ED - Handout2 - Dynamics of Electric DrivesDocument7 pagesED - Handout2 - Dynamics of Electric DrivesPatel RajeshNo ratings yet
- IDA Notes by Balaji RamakrishnaDocument71 pagesIDA Notes by Balaji RamakrishnaPkNo ratings yet
- Electrical Drives:: Unit - I Drive CharacteristicsDocument22 pagesElectrical Drives:: Unit - I Drive CharacteristicsJegan8586100% (1)
- Four Quadrant Operation: PresentationDocument11 pagesFour Quadrant Operation: PresentationAnkit Rohatgi100% (1)
- Chapter 1: IntroductionDocument118 pagesChapter 1: Introductionrizwan_adilNo ratings yet
- Four Quadrant OperationDocument6 pagesFour Quadrant OperationMohammed OvaizNo ratings yet
- Types of Load and Multiquadrant OperationDocument12 pagesTypes of Load and Multiquadrant OperationHiteshi gargNo ratings yet
- Dynamics of Electrical DrivesDocument12 pagesDynamics of Electrical Drivesdevchandar100% (1)
- An Electrical DriveDocument4 pagesAn Electrical DriveRuchiNo ratings yet
- Unit 1Document27 pagesUnit 1sagarNo ratings yet
- A Synchronous MotorDocument9 pagesA Synchronous MotorOmed OthmanNo ratings yet
- CH 6-Introduction Electric Drive and DC DriveDocument90 pagesCH 6-Introduction Electric Drive and DC DriveAbenezer ZenebeNo ratings yet
- Different Braking Techniques Employed To A Brushless DC Motor Drive Used in LocomotivesDocument7 pagesDifferent Braking Techniques Employed To A Brushless DC Motor Drive Used in LocomotivesKidus DawitNo ratings yet
- Published in Lift Report, January/February 1999.: Lift and Escalator Motor Sizing With Calculations & ExamplesDocument21 pagesPublished in Lift Report, January/February 1999.: Lift and Escalator Motor Sizing With Calculations & ExamplesHuy NguyễnNo ratings yet
- Introduction To Four Quadrant DriveDocument13 pagesIntroduction To Four Quadrant DriveDibya joyNo ratings yet
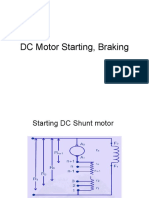
- DC Motor Starting, Braking Aug18Document25 pagesDC Motor Starting, Braking Aug18Ashwini Singh100% (1)
- Electrical Machine and DrivesDocument18 pagesElectrical Machine and DrivesNEERAJ27TRIPATHINo ratings yet
- 2 Marks (Questions & Answers) : Geared Coupling Power SupplyDocument5 pages2 Marks (Questions & Answers) : Geared Coupling Power SupplypugazhendiraNo ratings yet
- Induction Motor Braking Regenerative Dynamic Braking of Induction Motor - Electrical4u PDFDocument7 pagesInduction Motor Braking Regenerative Dynamic Braking of Induction Motor - Electrical4u PDFbalajiNo ratings yet
- I Dynamics of Electrical DrivesDocument87 pagesI Dynamics of Electrical DrivesSamsung TabletNo ratings yet
- Speed Torque CharacteristicDocument15 pagesSpeed Torque CharacteristicBangariNo ratings yet
- Brushless DC Motor Design For Electric Traction SystemDocument5 pagesBrushless DC Motor Design For Electric Traction Systemvishal komakulaNo ratings yet
- 22 Lift and Escalator Motor SizingDocument22 pages22 Lift and Escalator Motor SizingHEMANTKHERA67% (3)
- DC Motor DrivesDocument50 pagesDC Motor DrivesHari PrasadNo ratings yet
- Unit I V 2 Mark Question Answer 16 Mark QuestionsDocument23 pagesUnit I V 2 Mark Question Answer 16 Mark QuestionspugazhendiraNo ratings yet
- Anti Roll BackDocument4 pagesAnti Roll BackMaharaja Placement100% (1)
- Electrical Drives - 2Document3 pagesElectrical Drives - 2KumarNo ratings yet
- Induction Motor Braking Regenerative Plugging Dynamic Braking of Induction MotorDocument9 pagesInduction Motor Braking Regenerative Plugging Dynamic Braking of Induction MotorRajeev ValunjkarNo ratings yet
- D.C Shunt Motors:: Page On Torque atDocument2 pagesD.C Shunt Motors:: Page On Torque atimbanooobs23No ratings yet
- Power Generation From Speed Breaker: by Nitesh RDocument16 pagesPower Generation From Speed Breaker: by Nitesh RSatish HSNo ratings yet
- Power Generation From Speed Breaker: by Nitesh RDocument16 pagesPower Generation From Speed Breaker: by Nitesh RSatish HSNo ratings yet
- EE1351 Solid State DrivesDocument25 pagesEE1351 Solid State DrivesGaurav KumarNo ratings yet
- Electrical Machines: Lecture Notes for Electrical Machines CourseFrom EverandElectrical Machines: Lecture Notes for Electrical Machines CourseNo ratings yet
- Construction and Manufacture of AutomobilesFrom EverandConstruction and Manufacture of AutomobilesRating: 5 out of 5 stars5/5 (1)
- Half WaveDocument10 pagesHalf WavePandit ManishNo ratings yet
- Department of Electrical Engineering G H Patel College of Engineering and Technology V V NagarDocument27 pagesDepartment of Electrical Engineering G H Patel College of Engineering and Technology V V NagarPandit ManishNo ratings yet
- Class 3Document60 pagesClass 3Pandit ManishNo ratings yet
- Footstep Voltage Generator Using Piezo Electric Transducers PDFDocument4 pagesFootstep Voltage Generator Using Piezo Electric Transducers PDFPandit ManishNo ratings yet
- Tutorial 3Document1 pageTutorial 3Pandit ManishNo ratings yet
- Requirements From Nirma:: First 6 Months 7 Months To 48 MonthsDocument1 pageRequirements From Nirma:: First 6 Months 7 Months To 48 MonthsPandit ManishNo ratings yet
- Engineering Electromagnetics - W. H. Hayt and J. A. BuckDocument89 pagesEngineering Electromagnetics - W. H. Hayt and J. A. BuckPandit ManishNo ratings yet
- Citation 237052970Document1 pageCitation 237052970Pandit ManishNo ratings yet
- Citation 237052970Document1 pageCitation 237052970Pandit ManishNo ratings yet
- Chapter 10 - Odd-Numbered: Ab 2 Ba 2 Ab BaDocument9 pagesChapter 10 - Odd-Numbered: Ab 2 Ba 2 Ab BashinmyoungjuNo ratings yet
- Chapter 2 - Kinematics in One Dimension (PHY400)Document53 pagesChapter 2 - Kinematics in One Dimension (PHY400)Anis NasuhaNo ratings yet
- McqsDocument142 pagesMcqsZia Ur RehmanNo ratings yet
- Pearson ElectrostaticsDocument34 pagesPearson ElectrostaticsA10smartNo ratings yet
- Engineering AssistantDocument9 pagesEngineering AssistantKrishna ChaitanyaNo ratings yet
- Lab Session 2Document7 pagesLab Session 2usamaNo ratings yet
- Ti89 Power Calculator FunctionsDocument14 pagesTi89 Power Calculator FunctionsJack KennedyNo ratings yet
- COT 1 - 2nd Quarter Final 2Document3 pagesCOT 1 - 2nd Quarter Final 2chris jacobNo ratings yet
- E306 Analysis and ConclusionDocument1 pageE306 Analysis and ConclusionAlyssa AltreNo ratings yet
- Ward Leonard Product BrochureDocument69 pagesWard Leonard Product Brochuregold_mundoNo ratings yet
- AE Previous Papers EEEDocument9 pagesAE Previous Papers EEESathiya RajNo ratings yet
- Ultrasonic 4Document3 pagesUltrasonic 4nsbirwalNo ratings yet
- Current TransformerDocument5 pagesCurrent TransformerJenny AnchetaNo ratings yet
- Second Summative Test Science 6 Quarter 3Document1 pageSecond Summative Test Science 6 Quarter 3Jari CruzNo ratings yet
- Plano Electrico 994F PDFDocument4 pagesPlano Electrico 994F PDFChristianM.CarrascoNo ratings yet
- 22 PO03020-13-Lxxx Z MaterialsDocument57 pages22 PO03020-13-Lxxx Z MaterialshamzehNo ratings yet
- Problema Ligjet e NjutonitDocument9 pagesProblema Ligjet e NjutonitMentor KushoNo ratings yet
- Contactor: Electrical Equipment Operation and MaintenanceDocument23 pagesContactor: Electrical Equipment Operation and MaintenanceKenneth LewisNo ratings yet
- Sensor de Ca Con Arduino lm358Document4 pagesSensor de Ca Con Arduino lm358Wilfredo CindetNo ratings yet
- Quadcopter Control Project ReportDocument76 pagesQuadcopter Control Project Reportmudit vermaNo ratings yet
- Cables, Conduits and Trunking: To The 16th Edition IEE RegulationsDocument2 pagesCables, Conduits and Trunking: To The 16th Edition IEE RegulationsBattinapati ShivaNo ratings yet
- General Wave Properties 1 MSDocument4 pagesGeneral Wave Properties 1 MSherawatiNo ratings yet
- 3 Transformador Q652BDocument4 pages3 Transformador Q652Bfrank torresNo ratings yet
- 1.0 FUNDAMENTALS of VIBRATION 1.1 What Is Vibration? Mechanical VibrationDocument56 pages1.0 FUNDAMENTALS of VIBRATION 1.1 What Is Vibration? Mechanical VibrationLuis Balducci100% (1)
- LV and HV Cable SizingDocument7 pagesLV and HV Cable Sizingelectrifier_suren100% (1)
- Fundamentals of BiomechanicsDocument36 pagesFundamentals of BiomechanicsAlan Magpantay0% (1)
- Lab 1 Osborne ReynoldsDocument11 pagesLab 1 Osborne Reynoldsali mustafaNo ratings yet
- Datasheet 2 PDFDocument2 pagesDatasheet 2 PDFAhmad KiwanNo ratings yet
- PATRICK MULCAHY Divine Measure of Time and SpaceDocument95 pagesPATRICK MULCAHY Divine Measure of Time and SpacePash R100% (2)