Download as pdf or txt
You might also like
- 1 0 PDFDocument1 page1 0 PDFИнтертоп АрцNo ratings yet
- Unit8-Induction MotorDocument40 pagesUnit8-Induction MotorsaravananNo ratings yet
- LEB30303 Electrical Machine Synchronous Machines: Ahmad Zawawi Bin Jamaluddin Atzroulnizam Abu DR - Wardiah Mohd DahalanDocument57 pagesLEB30303 Electrical Machine Synchronous Machines: Ahmad Zawawi Bin Jamaluddin Atzroulnizam Abu DR - Wardiah Mohd DahalanAmmar RamanNo ratings yet
- Synchronous Machine PPT - DPCDocument65 pagesSynchronous Machine PPT - DPCdebipraasadNo ratings yet
- Lecture 1 Machine IIIDocument24 pagesLecture 1 Machine IIIfrankmogul12No ratings yet
- Three Phase Synchronous Machines - 2015Document93 pagesThree Phase Synchronous Machines - 2015आश्विन मरहट्टाNo ratings yet
- Syncgronous Generator UpdatedDocument78 pagesSyncgronous Generator UpdatedarsalNo ratings yet
- Ch5 Synchronous MachineDocument106 pagesCh5 Synchronous MachineVeli GörgülüNo ratings yet
- Chapter 5 - Synchronous Generator: The Effect of Load Changes On A Synchronous Generator Operating AloneDocument46 pagesChapter 5 - Synchronous Generator: The Effect of Load Changes On A Synchronous Generator Operating AloneMuhammad R Shihadeh100% (1)
- Chapter4 Synchronous MachinesDocument34 pagesChapter4 Synchronous Machinessatyakar_vvk100% (2)
- Ee322 Synchornous MachinesDocument104 pagesEe322 Synchornous MachinesDela Cruz MelvinNo ratings yet
- Synchronous MachinesclassDocument76 pagesSynchronous Machinesclassbhuvana71No ratings yet
- Chapter 5 Machine 1Document44 pagesChapter 5 Machine 1martazemeduNo ratings yet
- Synchronous MotorsDocument12 pagesSynchronous MotorsKaitlyn StylesNo ratings yet
- E M II: Synchronous MachineDocument10 pagesE M II: Synchronous MachineAkashman ShakyaNo ratings yet
- EE-101 (Unit-5)Document81 pagesEE-101 (Unit-5)Chauhan AyushmaanNo ratings yet
- Lecture 1 - Construction of Synchronous GeneratorDocument11 pagesLecture 1 - Construction of Synchronous GeneratorNdapewelao Mbwale100% (1)
- Synchronous Generator Lecture NoteDocument15 pagesSynchronous Generator Lecture NoteoyianonymousNo ratings yet
- How Does An Alternator WorkDocument3 pagesHow Does An Alternator WorkZaqPoilmNo ratings yet
- CH 5 MachineDocument8 pagesCH 5 MachineTeshale AlemieNo ratings yet
- Document PDFDocument21 pagesDocument PDFHarizx SaufixNo ratings yet
- Electrical Science 2Document26 pagesElectrical Science 2Josue CorreaNo ratings yet
- Wa0002.Document25 pagesWa0002.Akash SahaNo ratings yet
- Ehsan Sir - Synchronous MachinesDocument98 pagesEhsan Sir - Synchronous Machinesmdrafadul alamNo ratings yet
- Basics and Working of AC Motors & Basics of Power GeneratorDocument37 pagesBasics and Working of AC Motors & Basics of Power GeneratorYasir ShaikhNo ratings yet
- Synchronous Generator PART ADocument34 pagesSynchronous Generator PART Apayal100% (1)
- Week 12Document42 pagesWeek 12M. HamzaNo ratings yet
- AC GeneratorDocument44 pagesAC GeneratorSphinx RainxNo ratings yet
- AC MachinesDocument21 pagesAC Machineskeshab pandeyNo ratings yet
- (Four Weeks) : (Ambala Cantt) Krishan Kumar (11101032)Document33 pages(Four Weeks) : (Ambala Cantt) Krishan Kumar (11101032)crys suryo prayogo100% (1)
- Ac GeneratorsDocument7 pagesAc GeneratorsAnkur SheelNo ratings yet
- Synchronous GeneratorsDocument50 pagesSynchronous GeneratorsRajAnandNo ratings yet
- Synchronous MachineDocument9 pagesSynchronous MachineAnonymous rUufA9BUNo ratings yet
- Ec-Ii IttDocument133 pagesEc-Ii Ittmalihaishratjarin870No ratings yet
- Assignment # 7Document14 pagesAssignment # 7Jay EyNo ratings yet
- AC Synchronous GeneratorDocument8 pagesAC Synchronous Generatoraswardi8756No ratings yet
- Lecture 07 - Synchronous MachinesDocument98 pagesLecture 07 - Synchronous Machinesramkiran1989100% (1)
- Pricipio Básico de Funcionamiento Del AlternadorDocument5 pagesPricipio Básico de Funcionamiento Del AlternadorJasonNo ratings yet
- AC Machine FundamentalsDocument24 pagesAC Machine FundamentalsKimsairng CheaNo ratings yet
- AlternatorDocument23 pagesAlternatorpremameNo ratings yet
- Basic Construction of A DC MachineDocument20 pagesBasic Construction of A DC MachinesyammalaNo ratings yet
- Lecture 07 - Synchronous MachinesDocument98 pagesLecture 07 - Synchronous MachinesbrunichNo ratings yet
- EE-260 Lecture 19 Synchronous Generators IntroductionDocument24 pagesEE-260 Lecture 19 Synchronous Generators IntroductionRehan BasharatNo ratings yet
- Week 13Document52 pagesWeek 13M. HamzaNo ratings yet
- Notes For Power System 5th SemDocument28 pagesNotes For Power System 5th SemSidhant SharmaNo ratings yet
- AC GeneratorDocument25 pagesAC GeneratorAdaCatapang50% (2)
- Synchronous GeneratorDocument25 pagesSynchronous GeneratorNafiul Alam SnigdhoNo ratings yet
- Synchronous MachinesDocument19 pagesSynchronous MachinesPac ManNo ratings yet
- AC Machine Lecture No6Document43 pagesAC Machine Lecture No6Mohammed Dyhia AliNo ratings yet
- Ac GeneratorDocument21 pagesAc GeneratorCHALLENGER'S PHYSICS CLASSES100% (1)
- Synchronous Machines PDFDocument49 pagesSynchronous Machines PDFPradeep_VashistNo ratings yet
- Abigail EE 330 Assignment 7Document12 pagesAbigail EE 330 Assignment 7Jay EyNo ratings yet
- Electrical Technology-AlternatorsDocument4 pagesElectrical Technology-AlternatorsAnoop Mathew0% (1)
- Chapter 7 Induction Machines-EEE301Document96 pagesChapter 7 Induction Machines-EEE301DilekNo ratings yet
- A) DC Generator: Operating PrincipleDocument15 pagesA) DC Generator: Operating PrincipleAnonymous wLmO0seNo ratings yet
- Synchronous Machines: ENGNG 2024 Electrical EngineeringDocument25 pagesSynchronous Machines: ENGNG 2024 Electrical Engineeringpham van duNo ratings yet
- Generator Construction, Opn N Cooling SystemDocument187 pagesGenerator Construction, Opn N Cooling SystemHelal RahmanNo ratings yet
- Electromagnetism Ac Induction Motors: Visual Physics OnlineDocument11 pagesElectromagnetism Ac Induction Motors: Visual Physics OnlinelifesvcksNo ratings yet
- DC Power MachinesDocument15 pagesDC Power Machinesmarcelee wheatleNo ratings yet
- Assignment Synchronous Generator and Induction MotorDocument20 pagesAssignment Synchronous Generator and Induction MotorSyahril Abdullah100% (1)
- A New System of Alternating Current Motors and Transformers and Other EssaysFrom EverandA New System of Alternating Current Motors and Transformers and Other EssaysRating: 5 out of 5 stars5/5 (1)
- Hand Printing: Chloe JacksDocument13 pagesHand Printing: Chloe JackschloejacksNo ratings yet
- 10 сынып сор 7 юнит 4 ттоксанDocument3 pages10 сынып сор 7 юнит 4 ттоксанbbbbbNo ratings yet
- مسودة مواصفة سعودية 2888-2020Document10 pagesمسودة مواصفة سعودية 2888-2020MarwaNo ratings yet
- DEPO Notice-Joe Oltmann Set For 06-06Document20 pagesDEPO Notice-Joe Oltmann Set For 06-06Joe HoNo ratings yet
- IBM Python For Data ScienceDocument2 pagesIBM Python For Data ScienceLast HopeNo ratings yet
- Registry အေၾကာင္း PDFDocument12 pagesRegistry အေၾကာင္း PDFred eagle winsNo ratings yet
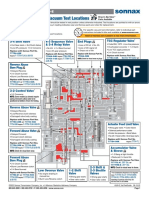
- 4L60-E VacTestGuideDocument4 pages4L60-E VacTestGuideJailton GomesNo ratings yet
- Cuelux Manual en 10324Document46 pagesCuelux Manual en 10324joeykeysNo ratings yet
- MonitorDocument1 pageMonitorLiam PowellNo ratings yet
- Alcatel Omnipcx Enterprise: Alc E T LDocument15 pagesAlcatel Omnipcx Enterprise: Alc E T LMohamed SalhiNo ratings yet
- Fleetguard New MRPDocument104 pagesFleetguard New MRPAwaish Khan100% (2)
- Unicast Routing Protocols For Wireless Ad Hoc NetworksDocument49 pagesUnicast Routing Protocols For Wireless Ad Hoc NetworksRaja MadhuvanthiNo ratings yet
- A Project On A Statistical Analysis of The OTT Platform Business in Bangladesh-ReportDocument24 pagesA Project On A Statistical Analysis of The OTT Platform Business in Bangladesh-ReportNayeem Ahamed AdorNo ratings yet
- How Ai Impacts PrivacyDocument5 pagesHow Ai Impacts PrivacyAcademic JournalNo ratings yet
- Office Ipsum 8Document9 pagesOffice Ipsum 8Ken KenNo ratings yet
- Vertical Bulk Storage Tanks: Taylor-Wharton Malaysia Sdn. BHDDocument2 pagesVertical Bulk Storage Tanks: Taylor-Wharton Malaysia Sdn. BHDSCALE Ingeniería y ConstrucciónNo ratings yet
- Perlindungan Data Pribadi Sebagai Bagian Dari HakDocument13 pagesPerlindungan Data Pribadi Sebagai Bagian Dari Hak027 Dwi Anita LestariNo ratings yet
- HAND GESTURE MAGIC Capstone Project RepoDocument35 pagesHAND GESTURE MAGIC Capstone Project RepoAkash DidhariaNo ratings yet
- CRM Unit Ii B2BDocument34 pagesCRM Unit Ii B2BPruthvi BhoiteNo ratings yet
- Devices Working On Att NetworkDocument13 pagesDevices Working On Att NetworkEthanNo ratings yet
- Application Note - XOR Gate Design PDFDocument5 pagesApplication Note - XOR Gate Design PDFTuan NguyenNo ratings yet
- Ceragon IP-20N IP-20A Installation Guide Rev H.02Document101 pagesCeragon IP-20N IP-20A Installation Guide Rev H.02jorgeschmuklerNo ratings yet
- OR Lecture Note - GBT PDFDocument32 pagesOR Lecture Note - GBT PDFSadeep RautNo ratings yet
- NCM Chapter SixDocument20 pagesNCM Chapter Sixdimberu yirgaNo ratings yet
- Fact and AssumptionsDocument2 pagesFact and AssumptionsChris AmelgaNo ratings yet
- AP HierarchyDocument25 pagesAP Hierarchyrikizalkarnain88No ratings yet
- New SyllabusDocument4 pagesNew SyllabusAkshat GuptaNo ratings yet
- Dipanshu Tomar MPR 02390101720 On Tupperware Marketing StrategiesDocument81 pagesDipanshu Tomar MPR 02390101720 On Tupperware Marketing StrategiesMr BeastNo ratings yet
- Logan Lombardi - Research Paper TemplateDocument6 pagesLogan Lombardi - Research Paper Templateapi-550805785No ratings yet