Download as docx, pdf, or txt
You might also like
- Case Study 2.0Document3 pagesCase Study 2.0Kram Ynar100% (2)
- CHAPTER 1: Introduction To Discrete-Time Control Systems Digital Control SystemsDocument6 pagesCHAPTER 1: Introduction To Discrete-Time Control Systems Digital Control SystemsIzzat AzmanNo ratings yet
- AB Unit 3 HRM Semester - Jan2021Document13 pagesAB Unit 3 HRM Semester - Jan2021Fahmina AhmedNo ratings yet
- Tutorials in SystemsDocument28 pagesTutorials in SystemsAbdullah Al AsikNo ratings yet
- Block Diagram Representation of A Simple Electronic System: Main DefinitionsDocument9 pagesBlock Diagram Representation of A Simple Electronic System: Main DefinitionsCansu ElizadeNo ratings yet
- But The Goal of Any Electrical or Electronic Control System Is To MeasureDocument8 pagesBut The Goal of Any Electrical or Electronic Control System Is To MeasureavenashaNo ratings yet
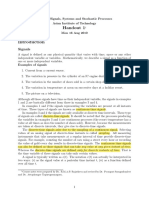
- Handout 1: SignalsDocument12 pagesHandout 1: SignalsBryan YaranonNo ratings yet
- Closed Loop Block DiagramDocument9 pagesClosed Loop Block Diagramspj99696649148No ratings yet
- Module 1: Signals in Natural Domain Lecture 3: Description of Systems ObjectivesDocument3 pagesModule 1: Signals in Natural Domain Lecture 3: Description of Systems Objectivesvizay237_430788222No ratings yet
- Closed-Loop Systems: SystemDocument9 pagesClosed-Loop Systems: SystemBhimsen ShresthaNo ratings yet
- Reviewer ControlDocument10 pagesReviewer ControlDioyo, ArvieNo ratings yet
- 4th Class, Production Engineering Department of Production Engineering and Metallurgy, University of Technology, BaghdadDocument94 pages4th Class, Production Engineering Department of Production Engineering and Metallurgy, University of Technology, BaghdadMegaroboMegaroboNo ratings yet
- Note 1: Lecture Notes of Control Systems I - ME 431/analysis and Synthesis of Linear Control System - ME862Document6 pagesNote 1: Lecture Notes of Control Systems I - ME 431/analysis and Synthesis of Linear Control System - ME862MessiNo ratings yet
- Introduction and Chapter Objectives: Real Analog - Circuits 1 Chapter 4: Systems and Network TheoremsDocument42 pagesIntroduction and Chapter Objectives: Real Analog - Circuits 1 Chapter 4: Systems and Network TheoremskrajasekarantutiNo ratings yet
- EE4 Tutorial: ConvolutionDocument10 pagesEE4 Tutorial: ConvolutionAppleWangAceNo ratings yet
- Introduction To DSP ProcessorsDocument9 pagesIntroduction To DSP ProcessorssantoshNo ratings yet
- Chapter OneDocument12 pagesChapter OneMengistu BirukeNo ratings yet
- What Is A "System"?Document6 pagesWhat Is A "System"?Ryan HiraniNo ratings yet
- Lecture3 Mech SUDocument15 pagesLecture3 Mech SUNazeeh Abdulrhman AlbokaryNo ratings yet
- Feedback Systems: Feedback System Block Diagram ModelDocument8 pagesFeedback Systems: Feedback System Block Diagram ModelAvik DattaNo ratings yet
- OCW - Control Systems - I (EE 503) - AY 2016-17 - 2017-18 PDFDocument100 pagesOCW - Control Systems - I (EE 503) - AY 2016-17 - 2017-18 PDFCiczmockingbird TsvkAdm100% (1)
- W EE 418 - Lecture 1 Overview and IntroductionDocument56 pagesW EE 418 - Lecture 1 Overview and IntroductionGGAP LASTNo ratings yet
- Closed-Loop System and Closed-Loop Control SystemsDocument9 pagesClosed-Loop System and Closed-Loop Control SystemsfwefNo ratings yet
- Chapter One:: Introduction To Industrial Automation and ControlDocument75 pagesChapter One:: Introduction To Industrial Automation and ControlamrNo ratings yet
- c1Document19 pagesc1vgnagaNo ratings yet
- Transfer Functions Examples Part 1Document21 pagesTransfer Functions Examples Part 1Gideon Moyo0% (1)
- Signals and Systems: Presented ByDocument12 pagesSignals and Systems: Presented ByANITA BISWASNo ratings yet
- A Signal Is Defined As Any Physical A Quantity That Vaies Witin TimeDocument13 pagesA Signal Is Defined As Any Physical A Quantity That Vaies Witin Timeel09612033No ratings yet
- Lec 3Document8 pagesLec 3students answerNo ratings yet
- Homework 8 TCDocument12 pagesHomework 8 TCSebastián TorresNo ratings yet
- CS Two MarksDocument7 pagesCS Two MarkssivaeinfoNo ratings yet
- Lecture 2Document38 pagesLecture 2Haisham AliNo ratings yet
- Sensors CharacteristicsDocument19 pagesSensors CharacteristicsSahitya SaxenaNo ratings yet
- Mechatronic System ElementDocument73 pagesMechatronic System ElementAbhijit AtoliyaNo ratings yet
- Sensors and TransducersDocument56 pagesSensors and Transducersmanjunath100% (2)
- Introdn To SystemsDocument7 pagesIntrodn To SystemsHarshal SpNo ratings yet
- Class1 PDFDocument46 pagesClass1 PDFJ Andrés SalasNo ratings yet
- Midterm ReviewDocument24 pagesMidterm ReviewwsovwNo ratings yet
- Cs-Module 1 NotesDocument58 pagesCs-Module 1 NotesSuprithaNo ratings yet
- Control SystemsDocument8 pagesControl Systemsmohammed zaidNo ratings yet
- Control Engineering: Types of Control SystemsDocument26 pagesControl Engineering: Types of Control SystemsGilbert SigalaNo ratings yet
- Engineering SystemsDocument5 pagesEngineering Systemsbedilu77No ratings yet
- Dynamic Charactertics PDF ModiDocument16 pagesDynamic Charactertics PDF Modi21UME003 TUSHAR DEBNo ratings yet
- CHP 1 (Completed)Document61 pagesCHP 1 (Completed)Ronaldo KmeNo ratings yet
- Instrumentation (Chapter 2)Document7 pagesInstrumentation (Chapter 2)Yab TadNo ratings yet
- Chapter 2Document31 pagesChapter 2Endalk SimegnNo ratings yet
- Modern Control SystemDocument72 pagesModern Control SystemBewnet GetachewNo ratings yet
- Architecture of Industrial Automation SystemsDocument10 pagesArchitecture of Industrial Automation Systemspranjal priyeNo ratings yet
- CH. 1 SignalsDocument29 pagesCH. 1 SignalsSohini ChakrabortyNo ratings yet
- ContDocument95 pagesContMilion dugumaNo ratings yet
- Lab - 06 56Document23 pagesLab - 06 56MEEN201101056 KFUEITNo ratings yet
- MechatronicsDocument26 pagesMechatronicsGlen Peter Miranda100% (2)
- Emt 2422 Control EngineeringDocument10 pagesEmt 2422 Control EngineeringFred MuthokaNo ratings yet
- CHAPTER 1: Introduction To Discrete-Time Control Systems Digital Control SystemsDocument6 pagesCHAPTER 1: Introduction To Discrete-Time Control Systems Digital Control SystemsIzzat AzmanNo ratings yet
- 3.3 Special Cases of The General System Model Zero-Order SystemsDocument6 pages3.3 Special Cases of The General System Model Zero-Order SystemsLUIS ANGEL CHAMORRO ECKERNo ratings yet
- Lecture 1Document13 pagesLecture 1Syed Hussain Akbar MosviNo ratings yet
- Introduction To Signals and Systems: By: Mrs. MridulaDocument23 pagesIntroduction To Signals and Systems: By: Mrs. MridulaMridula SinghNo ratings yet
- Simulink Basics TutorialDocument143 pagesSimulink Basics TutorialHiếu HuỳnhNo ratings yet
- Signals and Classificaiton of SignalsDocument20 pagesSignals and Classificaiton of SignalsOdebunmi Noah EniolaNo ratings yet
- Control Equipments and Type Signals (1) CLO1Document49 pagesControl Equipments and Type Signals (1) CLO1Ali Raza MemonNo ratings yet
- Control System NotesDocument127 pagesControl System NotesYash MathuriaNo ratings yet
- Stem: Science, Technology, Engineering and Maths Principles V11From EverandStem: Science, Technology, Engineering and Maths Principles V11No ratings yet
- 1 General Mechanical Specification 1.1 GeneralDocument35 pages1 General Mechanical Specification 1.1 GeneralKram YnarNo ratings yet
- Performance Test of Mini-Hydroelectric Power PlantDocument8 pagesPerformance Test of Mini-Hydroelectric Power PlantKram YnarNo ratings yet
- Code of Mechanical Engineering Ethics in The PhilippinesDocument14 pagesCode of Mechanical Engineering Ethics in The PhilippinesKram YnarNo ratings yet
- HydroelectricDocument13 pagesHydroelectricKram YnarNo ratings yet
- Experiment 1 ME LabDocument8 pagesExperiment 1 ME LabKram YnarNo ratings yet
- Gas TurbineDocument8 pagesGas TurbineKram YnarNo ratings yet
- Stepped PulleyDocument4 pagesStepped PulleyKram YnarNo ratings yet
- HIRARC FormDocument43 pagesHIRARC FormFachri Hidayat50% (2)
- Advanced Digital Controls Improve PFC PerformanceDocument18 pagesAdvanced Digital Controls Improve PFC Performancediablo diablolordNo ratings yet
- Servicemanual Panasonic kv-s5046h 5076h s3Document17 pagesServicemanual Panasonic kv-s5046h 5076h s3Ralf KöhlerNo ratings yet
- Bosch Solar Cell M 3BB EnglischDocument2 pagesBosch Solar Cell M 3BB EnglischAlberto AbsantNo ratings yet
- IGBT MitsubishiDocument4 pagesIGBT Mitsubishimadhuvariar100% (3)
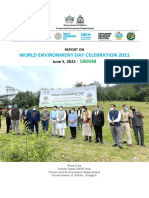
- Sikkim ENVIS-REPORT ON WED 2021Document25 pagesSikkim ENVIS-REPORT ON WED 2021CHANDER KUMAR MNo ratings yet
- Topic:: SolidsDocument8 pagesTopic:: SolidsDhanBahadurNo ratings yet
- Provincial Government of Oriental Mindoro Summary List of Office/G.O. Divisions Performance RatingsDocument3 pagesProvincial Government of Oriental Mindoro Summary List of Office/G.O. Divisions Performance RatingsZyreen Kate CataquisNo ratings yet
- Group 3 CW - Role of NGOs in Socio EconomicDocument9 pagesGroup 3 CW - Role of NGOs in Socio EconomicKisyenene JamusiNo ratings yet
- Stolzle Prestige Standards BrochureDocument9 pagesStolzle Prestige Standards BrochureTomi AkingbolagunNo ratings yet
- Herbert SpencerDocument1 pageHerbert Spencerng kamchungNo ratings yet
- Envi Cases - La VinaDocument100 pagesEnvi Cases - La VinaChristine Gel MadrilejoNo ratings yet
- Digital Communications Project ReportDocument14 pagesDigital Communications Project ReportSonal Pinto0% (1)
- Info Sheet IndivDocument2 pagesInfo Sheet IndivFRAULIEN GLINKA FANUGAONo ratings yet
- Aerodynamics of Rugby BallDocument5 pagesAerodynamics of Rugby BallChandra Harsha100% (1)
- Toxicon: Tamara Sajevic, Adrijana Leonardi, Igor Kri ZajDocument19 pagesToxicon: Tamara Sajevic, Adrijana Leonardi, Igor Kri Zajaulia rahmahNo ratings yet
- Residence Time Distribution For Chemical ReactorsDocument71 pagesResidence Time Distribution For Chemical ReactorsJuan Carlos Serrano MedranoNo ratings yet
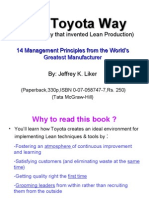
- The Toyota Way 1Document32 pagesThe Toyota Way 1kumamech100% (4)
- Father Dowling Mysteries - Wikipedia2Document11 pagesFather Dowling Mysteries - Wikipedia2Vocal Samir0% (1)
- APA PDS Supplement 1-90 Design and Fabrication of Plywood CurvedDocument24 pagesAPA PDS Supplement 1-90 Design and Fabrication of Plywood CurvedVinícius Da Cunha FerreiraNo ratings yet
- Microsoft Excel Is A Spreadsheet Developed by Microsoft For WindowsDocument9 pagesMicrosoft Excel Is A Spreadsheet Developed by Microsoft For WindowsSherryl ZamonteNo ratings yet
- Astm Specifications For Concrete Masonry Units: TEK 1-1FDocument4 pagesAstm Specifications For Concrete Masonry Units: TEK 1-1FEric HernándezNo ratings yet
- 6 TransmissionDocument81 pages6 Transmissionalexis aguirre espejoNo ratings yet
- Training Activity Matrix: Training Activities Trainees Facilities/Tools/Equip Venue Date RemarksDocument3 pagesTraining Activity Matrix: Training Activities Trainees Facilities/Tools/Equip Venue Date RemarksCharleneNo ratings yet
- VIR - Reform in TelecommunicationsDocument10 pagesVIR - Reform in TelecommunicationsNgu HoangNo ratings yet
- Tryptophan 2 PDFDocument9 pagesTryptophan 2 PDFLim Xiu XianNo ratings yet
- FORM V Abstract Under The Payment of Wages Act, 1936 (English Version)Document2 pagesFORM V Abstract Under The Payment of Wages Act, 1936 (English Version)anant nagvekarsNo ratings yet
- Power Electronic Unit For Field-Mounting (Contrac) EBN853, EBN861Document44 pagesPower Electronic Unit For Field-Mounting (Contrac) EBN853, EBN861Sad LiveNo ratings yet
- 74 20 03Document6 pages74 20 03vanmorrison69No ratings yet