Download as pdf or txt
You might also like
- 100 Questões Comentadas de PO PDFDocument31 pages100 Questões Comentadas de PO PDFMag NetoNo ratings yet
- Race Driver ModelDocument14 pagesRace Driver ModelAndrea Fontana100% (1)
- English Bullseye ChartDocument1 pageEnglish Bullseye ChartBaloo Nick CastlesNo ratings yet
- Dynamic Motion Planning of Autonomous Vehicles: Zvi Shiller, and Yu-Rwei GwoDocument9 pagesDynamic Motion Planning of Autonomous Vehicles: Zvi Shiller, and Yu-Rwei GwoFestNo ratings yet
- A Path and Velocity Planning Method For Lane Changing Collision AvoidanceDocument9 pagesA Path and Velocity Planning Method For Lane Changing Collision Avoidancego.thanachotstNo ratings yet
- Smooth Obstacle Avoidance Path Planning For Autonomous VehiclesDocument6 pagesSmooth Obstacle Avoidance Path Planning For Autonomous VehiclesRubénGómezGómezNo ratings yet
- Collision Avoidence For Vehicle Following PDFDocument12 pagesCollision Avoidence For Vehicle Following PDFsuviryNo ratings yet
- Rapid Path Planning Steerable Curvature ApproachDocument12 pagesRapid Path Planning Steerable Curvature Approachvishal kumarNo ratings yet
- A Real-Time Motion Planner With Trajectory Optimization For Autonomous VehiclesDocument7 pagesA Real-Time Motion Planner With Trajectory Optimization For Autonomous Vehiclesabbas boumenjelNo ratings yet
- Autonomous Vehicle Parking Using Artificial Intelligent ApproachDocument6 pagesAutonomous Vehicle Parking Using Artificial Intelligent ApproachmihaipaulescuNo ratings yet
- Vehicle ModelDocument6 pagesVehicle ModelHattab MakerNo ratings yet
- Abraham Anikoh O. Review of Microscopic Traffic Model Using Artificial IntelligenceDocument19 pagesAbraham Anikoh O. Review of Microscopic Traffic Model Using Artificial IntelligenceAnikoh AbrahamNo ratings yet
- Accurate and Stable Mobile Robot Path Tracking Algorithm: An Integrated Solution For Off-Road and High Speed ContextDocument7 pagesAccurate and Stable Mobile Robot Path Tracking Algorithm: An Integrated Solution For Off-Road and High Speed ContextChu DucNo ratings yet
- Howard Thomas 2007 1Document20 pagesHoward Thomas 2007 1Suresh KumarNo ratings yet
- A Fuzzy-Logic-Based Approach For Mobile Robot Path TrackingDocument11 pagesA Fuzzy-Logic-Based Approach For Mobile Robot Path TrackingRajesh KumarNo ratings yet
- Velocity Profile Generation For Trajectories of A Self-Driving CARDocument18 pagesVelocity Profile Generation For Trajectories of A Self-Driving CARTJPRC PublicationsNo ratings yet
- Obstacle Detection Using Hough Transform: Elated WorkDocument4 pagesObstacle Detection Using Hough Transform: Elated WorkFloyd ClarkeNo ratings yet
- Tracking Oncoming and Turning Vehicles at Intersections: Alexander Barth and Uwe FrankeDocument8 pagesTracking Oncoming and Turning Vehicles at Intersections: Alexander Barth and Uwe Frankeshisasane2No ratings yet
- Research Article: Research On Local Dynamic Path Planning Method For Intelligent Vehicle Lane-ChangingDocument11 pagesResearch Article: Research On Local Dynamic Path Planning Method For Intelligent Vehicle Lane-Changingmmorad aamraouyNo ratings yet
- Motion Generation and Control For Parking An Autonomous VehicleDocument6 pagesMotion Generation and Control For Parking An Autonomous VehicleFaisal ur RehmanNo ratings yet
- Physica A: Sheng Jin, Dianhai Wang, Pengfei Tao, Pingfan LiDocument9 pagesPhysica A: Sheng Jin, Dianhai Wang, Pengfei Tao, Pingfan Lijohncena3No ratings yet
- Howard Kelly 2007 Optimal Rough Terrain Trajectory Generation For Wheeled Mobile RobotsDocument26 pagesHoward Kelly 2007 Optimal Rough Terrain Trajectory Generation For Wheeled Mobile RobotsAaronNo ratings yet
- Two-Lane Traffic Simulations With A Blockage Induced by An Accident CarDocument8 pagesTwo-Lane Traffic Simulations With A Blockage Induced by An Accident CarAnatta OngNo ratings yet
- Adaptive Anytime Motion Planning For Robust Robot Navigation in Natural EnvironmentsDocument7 pagesAdaptive Anytime Motion Planning For Robust Robot Navigation in Natural EnvironmentsTales MarquesNo ratings yet
- Analysis and Experimental Verification For Dynamic Modeling of A Skid-Steered Wheeled VehicleDocument14 pagesAnalysis and Experimental Verification For Dynamic Modeling of A Skid-Steered Wheeled VehicleJuan Carlos TiqueNo ratings yet
- Art. Ackermann Ulkins GulderDocument5 pagesArt. Ackermann Ulkins GulderENIC-AITCGNo ratings yet
- Reynolds Haertle OmnibalancerDocument6 pagesReynolds Haertle OmnibalancerMithun JohnNo ratings yet
- Werling Optimal Trajectory Generationfor Dynamic Street Scenariosina Frenet FrameDocument8 pagesWerling Optimal Trajectory Generationfor Dynamic Street Scenariosina Frenet FramehugoNo ratings yet
- Iv 2012Document7 pagesIv 2012Vikas LakhmaniNo ratings yet
- Development of Semi-Active Road-Friendly Truck SuspensionsDocument10 pagesDevelopment of Semi-Active Road-Friendly Truck SuspensionsLe ThanhNo ratings yet
- IV KinematicMPC JasonDocument6 pagesIV KinematicMPC Jasonbacem hassenNo ratings yet
- A Low Order Dynamic Model of A Tracked Robot Inclusive of Non-Linear SlipDocument30 pagesA Low Order Dynamic Model of A Tracked Robot Inclusive of Non-Linear Slipgo.thanachotstNo ratings yet
- Estimation of Average Space Headway Under Heterogeneous Traffic ConditionsDocument5 pagesEstimation of Average Space Headway Under Heterogeneous Traffic Conditionsangelica butonNo ratings yet
- IMP - Automated Lane Change Controller DesignDocument10 pagesIMP - Automated Lane Change Controller Designjohncena3No ratings yet
- Zhang Yao Juan 2011Document4 pagesZhang Yao Juan 2011Gia Phạm HoàngNo ratings yet
- Detc2008 49243Document10 pagesDetc2008 49243pad abtNo ratings yet
- A Dynamic Trajectory Planning MethodDocument17 pagesA Dynamic Trajectory Planning Methodgo.thanachotstNo ratings yet
- 2hhhhhhhhhhhhhhhhhhhh018 IEEE IV SuDocument6 pages2hhhhhhhhhhhhhhhhhhhh018 IEEE IV Summorad aamraouyNo ratings yet
- An Effective Approach For Dynamic AnalysDocument27 pagesAn Effective Approach For Dynamic AnalysagmyatsanNo ratings yet
- A Survey of Path Planning Algorithms For Autonomous VehiclesDocument10 pagesA Survey of Path Planning Algorithms For Autonomous VehiclesCATIA BACKUPNo ratings yet
- A Model Based Path Planning Algorithm For Self-Driving Cars in Dynamic EnvironmentDocument6 pagesA Model Based Path Planning Algorithm For Self-Driving Cars in Dynamic EnvironmentSiddharth UNo ratings yet
- Entrenamiento de CarroDocument6 pagesEntrenamiento de CarroGerman CamposNo ratings yet
- 2012SISY Modelingandfuzzycontrolofafour WheeledmobilerobotDocument7 pages2012SISY Modelingandfuzzycontrolofafour WheeledmobilerobotAyoub El MrabetNo ratings yet
- Robust Model Predictive Control For Path TrackingDocument9 pagesRobust Model Predictive Control For Path Trackingconfess msritNo ratings yet
- A Heuristic Search Algorithm For Vehicle Routing Problems and GIS-based Vehicle Routing System OnboardDocument6 pagesA Heuristic Search Algorithm For Vehicle Routing Problems and GIS-based Vehicle Routing System OnboardemperorcNo ratings yet
- Vehicle Modeling With Nonlinear Tyres For Vehicle Stability AnalysisDocument6 pagesVehicle Modeling With Nonlinear Tyres For Vehicle Stability AnalysisAngulumaNo ratings yet
- Ahmed 2013Document17 pagesAhmed 2013Ho Huu VinhNo ratings yet
- A New Method For Smooth Trajectory Planning of Robot ManipulatorsDocument17 pagesA New Method For Smooth Trajectory Planning of Robot Manipulatorswanglei2112221990No ratings yet
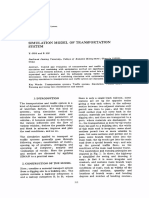
- Simulation Model of Transportation SystemDocument5 pagesSimulation Model of Transportation SystemBrian GnorldanNo ratings yet
- Monitoring Bridge Dynamic Behaviour Using An Instrumented Two Axle Vehicle P.J. Mcgetrick, A. González & E.J.ObrienDocument8 pagesMonitoring Bridge Dynamic Behaviour Using An Instrumented Two Axle Vehicle P.J. Mcgetrick, A. González & E.J.ObrienArturo GonzalezNo ratings yet
- SUMO Lane Change Model Template SUMO2014Document13 pagesSUMO Lane Change Model Template SUMO2014Cla sher cocNo ratings yet
- Curvature Based Velocity Control System For Mobile Robot: Pengfei Wang and Kosuke SekiyamaDocument6 pagesCurvature Based Velocity Control System For Mobile Robot: Pengfei Wang and Kosuke SekiyamaRavi RanjanNo ratings yet
- An Analysis of Rollover Stability MeasurementDocument6 pagesAn Analysis of Rollover Stability MeasurementLuis VelascoNo ratings yet
- An Online Coverage Path Planning Method For Sweeper Trucks in Dynamic EnvironmentsDocument8 pagesAn Online Coverage Path Planning Method For Sweeper Trucks in Dynamic EnvironmentsBo ChenNo ratings yet
- Tire Road Surface Conditions and 2D Curve Analysis Based Development of Surrogate Safety MeasuresDocument8 pagesTire Road Surface Conditions and 2D Curve Analysis Based Development of Surrogate Safety MeasuresbijejournalNo ratings yet
- Taehyung LEE, Choonsoo PARK, Sunghoon CHOI, Kihwan KIM Taehyung LEE, Choonsoo PARK, Sunghoon CHOI, Kihwan KIM Taehyung LEE, Choonsoo PARK, Sunghoon CHOI, Kihwan KIMDocument6 pagesTaehyung LEE, Choonsoo PARK, Sunghoon CHOI, Kihwan KIM Taehyung LEE, Choonsoo PARK, Sunghoon CHOI, Kihwan KIM Taehyung LEE, Choonsoo PARK, Sunghoon CHOI, Kihwan KIMRyu ReyhanNo ratings yet
- 2012SISY Modelingandfuzzycontrolofafour WheeledmobilerobotDocument6 pages2012SISY Modelingandfuzzycontrolofafour WheeledmobilerobotgadaNo ratings yet
- G2 Continuity Smooth Path Planning Using Cubic Polynomial Interpolation With Membership FunctionDocument13 pagesG2 Continuity Smooth Path Planning Using Cubic Polynomial Interpolation With Membership FunctionSố ĐenNo ratings yet
- Continuous Curvature Control of Mobile Robots WithDocument6 pagesContinuous Curvature Control of Mobile Robots WithPEDRO JESUS GONZALEZ TEBARNo ratings yet
- Planar Linkage Synthesis: A modern CAD based approachFrom EverandPlanar Linkage Synthesis: A modern CAD based approachNo ratings yet
- Neues verkehrswissenschaftliches Journal - Ausgabe 16: Capacity Research in Urban Rail-Bound Transportation with Special Consideration of Mixed TrafficFrom EverandNeues verkehrswissenschaftliches Journal - Ausgabe 16: Capacity Research in Urban Rail-Bound Transportation with Special Consideration of Mixed TrafficNo ratings yet
- Bharat Heavy Electricals LimitedDocument4 pagesBharat Heavy Electricals LimitedkmbkrisNo ratings yet
- Hydraulics - Lecture 5 - DamsDocument22 pagesHydraulics - Lecture 5 - Damsmeh mehNo ratings yet
- IP-16-11-01 Neutral Grounding ResistorsDocument1 pageIP-16-11-01 Neutral Grounding ResistorsHarold Gutierrez MartinezNo ratings yet
- Important People - Exercises 2 PDFDocument2 pagesImportant People - Exercises 2 PDFDiana BerariNo ratings yet
- VT572 Microwave Radar Motion Movement Sensor Detector Datasheet (Vutlan)Document16 pagesVT572 Microwave Radar Motion Movement Sensor Detector Datasheet (Vutlan)gm4984371No ratings yet
- Risk Management in The Outdoors 1Document13 pagesRisk Management in The Outdoors 1api-278802103No ratings yet
- NIT 1 4 7040 Lecture 1 VLSI EC601Document26 pagesNIT 1 4 7040 Lecture 1 VLSI EC601SANDIP PODDARNo ratings yet
- Alkyl PolyglucosidesDocument44 pagesAlkyl PolyglucosidesctmasdeNo ratings yet
- WBC Histogram - Interpretations of 3-Part Differentiation (Sysmex) PDFDocument5 pagesWBC Histogram - Interpretations of 3-Part Differentiation (Sysmex) PDFRuxandra Mesaros100% (1)
- Polycab Solar PDFDocument6 pagesPolycab Solar PDFVivek RamachandranNo ratings yet
- Comandos de ScilabDocument11 pagesComandos de ScilabAlejandro Galindo Vega0% (1)
- Values and Ethics - Key Definitions NotesDocument20 pagesValues and Ethics - Key Definitions NotesDHANASEKAR K IV A 9023No ratings yet
- Reduced Graphene Oxide Filled Cellulose Films For Flexible Temperature SensorDocument8 pagesReduced Graphene Oxide Filled Cellulose Films For Flexible Temperature SensorMicu CristiNo ratings yet
- Spear 4 Module 3Document4 pagesSpear 4 Module 3Cherry Mae AlvaricoNo ratings yet
- MatrixDocument30 pagesMatrixauras2065No ratings yet
- Foma NDT System PDFDocument16 pagesFoma NDT System PDFPP043No ratings yet
- Rose Water OintmentDocument1 pageRose Water OintmentThomas Niccolo Filamor ReyesNo ratings yet
- Assessment 1 IMINT Exercise BRAVODocument6 pagesAssessment 1 IMINT Exercise BRAVOYousef Al HashemiNo ratings yet
- Chapter 2 Creating and Editing Screens: 2.1 Scredit (Screen Editor) SetupDocument4 pagesChapter 2 Creating and Editing Screens: 2.1 Scredit (Screen Editor) SetupryoNo ratings yet
- FMEADocument5 pagesFMEAmz007No ratings yet
- Production of Xylitol From Corn Cob Hydrolysate - Mardawati - 2018 - IOP - Conf. - Ser. - Earth - Environ. - Sci. - 141 - 012019Document12 pagesProduction of Xylitol From Corn Cob Hydrolysate - Mardawati - 2018 - IOP - Conf. - Ser. - Earth - Environ. - Sci. - 141 - 012019RosalinaIlmiAmaliaNo ratings yet
- March of The Metro Gnome Lesson PlanDocument2 pagesMarch of The Metro Gnome Lesson Planapi-607297153No ratings yet
- Hank Kolb 3Document3 pagesHank Kolb 3gr8_amaraNo ratings yet
- ECG-Based Biometric Schemes For Healthcare: A Systematic ReviewDocument23 pagesECG-Based Biometric Schemes For Healthcare: A Systematic ReviewInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- 2046 - Decorative Synthetic Bonded Laminated SheetsDocument53 pages2046 - Decorative Synthetic Bonded Laminated SheetsKaushik SenguptaNo ratings yet
- Kindergarten Writing Lesson PlanDocument7 pagesKindergarten Writing Lesson Planapi-332051194No ratings yet
- The Ascent and Decline of A Great Balneological Resort: PucioasaDocument6 pagesThe Ascent and Decline of A Great Balneological Resort: PucioasaStefan RaduNo ratings yet
- Pinelands National ReserveDocument2 pagesPinelands National ReservesallyNo ratings yet