Download as pdf or txt
You might also like
- Bookings Assignment PDFDocument38 pagesBookings Assignment PDFMas Pan0% (1)
- Elliott Wave Timing Beyond Ordinary Fibonacci MethodsFrom EverandElliott Wave Timing Beyond Ordinary Fibonacci MethodsRating: 4 out of 5 stars4/5 (21)
- MDG - Financials Config PDFDocument128 pagesMDG - Financials Config PDFMohan KrishnaNo ratings yet
- B1-Preliminary-Posters 2020 PDFDocument3 pagesB1-Preliminary-Posters 2020 PDFalbertoygemmaNo ratings yet
- GM OBDII Manufacturer Specific Trouble Codes For GMDocument30 pagesGM OBDII Manufacturer Specific Trouble Codes For GMheartofdixie100% (1)
- Lec 27Document26 pagesLec 27Shailza SinghNo ratings yet
- PipeliningDocument25 pagesPipeliningAditya PrakashNo ratings yet
- Lec 15Document11 pagesLec 15Elisée NdjabuNo ratings yet
- Lec6 PDFDocument22 pagesLec6 PDFElisée NdjabuNo ratings yet
- Lec 5Document26 pagesLec 5Raquel CervigónNo ratings yet
- Lec 4Document28 pagesLec 4rafi skNo ratings yet
- Lec7 PDFDocument19 pagesLec7 PDFElisée NdjabuNo ratings yet
- Today We Start With Introduction To State Space in This We Will Cover Why There Is Need For State Space Representation. (Refer Slide Time: 00:34)Document11 pagesToday We Start With Introduction To State Space in This We Will Cover Why There Is Need For State Space Representation. (Refer Slide Time: 00:34)GASHU MESFINNo ratings yet
- VLSI Design RAZAVIDocument20 pagesVLSI Design RAZAVIabm999No ratings yet
- Lec5 PDFDocument23 pagesLec5 PDFElisée NdjabuNo ratings yet
- Lec 25Document20 pagesLec 25Shailza SinghNo ratings yet
- Digital Computer OrganizationDocument13 pagesDigital Computer OrganizationIndrajeet KumarNo ratings yet
- Fast Adder NptelDocument23 pagesFast Adder NptelSolleti Suresh4No ratings yet
- Lec52 PDFDocument15 pagesLec52 PDFabm999100% (1)
- Digital VLSI System Design Prof. Dr. S. Ramachandran Department of Electrical Engineering Indian Institute of Technology, MadrasDocument30 pagesDigital VLSI System Design Prof. Dr. S. Ramachandran Department of Electrical Engineering Indian Institute of Technology, MadrasPronadeep BoraNo ratings yet
- Lec28 PDFDocument17 pagesLec28 PDFItsy BitsyNo ratings yet
- CA AssignmentDocument8 pagesCA Assignmentrida faizNo ratings yet
- Refer Slide Time: 01:50Document28 pagesRefer Slide Time: 01:50Elisée NdjabuNo ratings yet
- Lec 5Document14 pagesLec 5Hawk MrNo ratings yet
- Pipeline Concepts - Collision AvoidanceDocument9 pagesPipeline Concepts - Collision AvoidancePrabakaran EllaiyappanNo ratings yet
- Computer Architecture Prof. Madhu Mutyam Department of Computer Science and Engineering Indian Institute of Technology, MadrasDocument14 pagesComputer Architecture Prof. Madhu Mutyam Department of Computer Science and Engineering Indian Institute of Technology, MadrasElisée NdjabuNo ratings yet
- Prof. Ajit Pal Department of Computer Science and Engineering Indian Institute of Technology, Kharagpur Lecture - 16 Branch PredictionDocument26 pagesProf. Ajit Pal Department of Computer Science and Engineering Indian Institute of Technology, Kharagpur Lecture - 16 Branch Predictionurjashah3No ratings yet
- Computer Architecture Prof. Madhu Mutyam Department of Computer Science and Engineering Indian Institute of Technology, MadrasDocument15 pagesComputer Architecture Prof. Madhu Mutyam Department of Computer Science and Engineering Indian Institute of Technology, MadrasElisée Ndjabu100% (1)
- Lec 36Document14 pagesLec 36Yellasiri SureshNo ratings yet
- Lec 4Document16 pagesLec 4Aya abu nadaNo ratings yet
- Lec11 PDFDocument19 pagesLec11 PDFyfiamataimNo ratings yet
- Lec 21Document16 pagesLec 21Tshering Sangmoo SherpaNo ratings yet
- Let's Start Learning The PLC Programming: Vlada MarkovicDocument4 pagesLet's Start Learning The PLC Programming: Vlada MarkovicManuel Henríquez SantanaNo ratings yet
- Lec29 PDFDocument12 pagesLec29 PDFItsy BitsyNo ratings yet
- Lec 2Document15 pagesLec 2Aya abu nadaNo ratings yet
- Fluid LectDocument5 pagesFluid LectghulamhabibscmeNo ratings yet
- Lec 9Document12 pagesLec 9Raj singhNo ratings yet
- Lec12 2Document12 pagesLec12 2Yellasiri SureshNo ratings yet
- Lec 6Document17 pagesLec 6Dolly SinghNo ratings yet
- MyDocument12 pagesMyK. ogareNo ratings yet
- Lec 3Document13 pagesLec 3Rahatul RifatNo ratings yet
- Advanced Control System Design Prof. Radhakant Padhi Department of Aerospace Engineering Indian Institute of Science, BangaloreDocument38 pagesAdvanced Control System Design Prof. Radhakant Padhi Department of Aerospace Engineering Indian Institute of Science, BangaloreJai SebastianNo ratings yet
- Lec 6Document17 pagesLec 6Nahin AminNo ratings yet
- Lec 34Document15 pagesLec 34Yellasiri SureshNo ratings yet
- Lec 4Document18 pagesLec 4rahulpikaleNo ratings yet
- Lecture 12 - FAULT TREE ANALYSIS (FTA) - ConstructionDocument25 pagesLecture 12 - FAULT TREE ANALYSIS (FTA) - ConstructionBalamurugan ThirunavukkarasuNo ratings yet
- Computer Architecture Prof. Madhu Mutyam Department of Computer Science and Engineering Indian Institute of Technology, MadrasDocument11 pagesComputer Architecture Prof. Madhu Mutyam Department of Computer Science and Engineering Indian Institute of Technology, MadrasElisée NdjabuNo ratings yet
- Chip Design Flow and Hardware ModellingDocument39 pagesChip Design Flow and Hardware Modellingskarthikpriya100% (1)
- Lec22 PDFDocument15 pagesLec22 PDFRaviNo ratings yet
- Lec 23Document13 pagesLec 23sixfacerajNo ratings yet
- Lec 2Document18 pagesLec 219l31a1918No ratings yet
- VLSI Physical Design Prof. Indranil Sengupta Department of Computer Science and Engineering Indian Institute of Technology, Kharagpur Lecture - 02 Design RepresentationDocument20 pagesVLSI Physical Design Prof. Indranil Sengupta Department of Computer Science and Engineering Indian Institute of Technology, Kharagpur Lecture - 02 Design RepresentationKhyatiNo ratings yet
- Lec 2Document18 pagesLec 2Nahin AminNo ratings yet
- Cpu Sched MLFQDocument12 pagesCpu Sched MLFQadithya604No ratings yet
- Lec 12Document18 pagesLec 12gabbup13No ratings yet
- Power System Analysis Prof. S.N. Singh Department of Electrical Engineering Indian Institute of Technology, Kanpur Lecture - 17Document30 pagesPower System Analysis Prof. S.N. Singh Department of Electrical Engineering Indian Institute of Technology, Kanpur Lecture - 17Engr Fahimuddin QureshiNo ratings yet
- Instruction Cycle Time PDFDocument6 pagesInstruction Cycle Time PDFOcbit LowbyteNo ratings yet
- Lect 4Document17 pagesLect 4Adeoti OladapoNo ratings yet
- Cpu Sched MLFQDocument12 pagesCpu Sched MLFQPutu Eka WahyudiNo ratings yet
- System Design Example 38Document20 pagesSystem Design Example 38Yellasiri SureshNo ratings yet
- Lec 60Document21 pagesLec 60Elisée NdjabuNo ratings yet
- Sequential Function ChartDocument6 pagesSequential Function ChartLuciano Cardoso Vasconcelos100% (1)
- Lec30 PDFDocument13 pagesLec30 PDFItsy BitsyNo ratings yet
- Lec 31Document33 pagesLec 31zateenNo ratings yet
- Keystroke Dynamics Support For Authentication Mechanism: Presentation OnDocument37 pagesKeystroke Dynamics Support For Authentication Mechanism: Presentation OnShailza SinghNo ratings yet
- Lec 27Document26 pagesLec 27Shailza SinghNo ratings yet
- Lec 25Document20 pagesLec 25Shailza SinghNo ratings yet
- Lec 15Document37 pagesLec 15Shailza SinghNo ratings yet
- Terminology: Engin Ingenious Siege Engines Cotton GinDocument1 pageTerminology: Engin Ingenious Siege Engines Cotton GinlahiruNo ratings yet
- Multi-Fuel Mobile Power GenerationDocument4 pagesMulti-Fuel Mobile Power Generationjpablop12No ratings yet
- iDRAC Service Module 2.3 Installation GuideDocument36 pagesiDRAC Service Module 2.3 Installation Guideraagini malaNo ratings yet
- Manufacturing of Helical Gears by Using Fused Deposite Modelling-An Additive Manufacturing ApproachDocument22 pagesManufacturing of Helical Gears by Using Fused Deposite Modelling-An Additive Manufacturing ApproachSri Nadh PadavalaNo ratings yet
- BTech 4-1 R07Document6 pagesBTech 4-1 R07Sai SiddhuNo ratings yet
- Six Sigma - Six Sigma and Lean Manufacturing PDFDocument2 pagesSix Sigma - Six Sigma and Lean Manufacturing PDFFaress RabiNo ratings yet
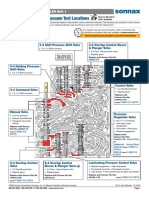
- 722 6 VacTestGuideDocument4 pages722 6 VacTestGuideFab Faby FabienNo ratings yet
- Injection Pump Test SpecificationsDocument2 pagesInjection Pump Test SpecificationsKevin TtitoNo ratings yet
- Installation Manual EM-303/EM-304/EM-305: I. Accessory Parts II. Installation ProceduresDocument3 pagesInstallation Manual EM-303/EM-304/EM-305: I. Accessory Parts II. Installation ProceduresHoussein KachmarNo ratings yet
- Azure Virtual Desktop - User Guide - v1.2Document61 pagesAzure Virtual Desktop - User Guide - v1.2Carlos CelisNo ratings yet
- 4.2 List of Faults and Alarms: F01000 Internal Software ErrorDocument94 pages4.2 List of Faults and Alarms: F01000 Internal Software ErrorMario RibeiroNo ratings yet
- Computer Aided InstructionDocument22 pagesComputer Aided InstructionIsrael Anthony AlmascoNo ratings yet
- VBA Lession 2Document10 pagesVBA Lession 2mc killoNo ratings yet
- DNG Specification Ver. 1.6Document109 pagesDNG Specification Ver. 1.6Russell ZhangNo ratings yet
- Jomy John ResumeDocument3 pagesJomy John ResumeJomy JohnNo ratings yet
- Operational Checks For STPDocument5 pagesOperational Checks For STPAshish A ArbaleNo ratings yet
- Mpi Assignment Solution3Document25 pagesMpi Assignment Solution3alkesh.engNo ratings yet
- Caillau Visa ToolDocument14 pagesCaillau Visa ToolLady MenaNo ratings yet
- 04 Oracle Big Data Appliance Deep DiveDocument49 pages04 Oracle Big Data Appliance Deep DiveShiva RokaNo ratings yet
- FXN32N55T: General Description FeaturesDocument5 pagesFXN32N55T: General Description Featurescharly36No ratings yet
- Sap RouterDocument3 pagesSap RouterRamesh KanakalaNo ratings yet
- Activity 5-Cac, Jessa Mae A,-StsDocument2 pagesActivity 5-Cac, Jessa Mae A,-StsJessa Mae CacNo ratings yet
- Autoclave Validation GuideDocument6 pagesAutoclave Validation Guidejibin100% (1)
- Powerscreen Trakpactor 320 Brochure EN2018Document1 pagePowerscreen Trakpactor 320 Brochure EN2018DCNo ratings yet
- Vingcard Classic Rfid: Technical ManualDocument34 pagesVingcard Classic Rfid: Technical ManualRoger ChungNo ratings yet
- M4 - PseudocodeDocument38 pagesM4 - PseudocodeVemas SatriaNo ratings yet