Download as pdf or txt
You might also like
- Solution Manual Modern General Relativity by Guidry PDFDocument125 pagesSolution Manual Modern General Relativity by Guidry PDFEzz Hassan100% (3)
- Applied Partial Differential Equations With Fourier Series and Boundary Value Problems 5th Edition Richard Haberman Solutions ManualDocument14 pagesApplied Partial Differential Equations With Fourier Series and Boundary Value Problems 5th Edition Richard Haberman Solutions Manualolwengwynfqm6rdNo ratings yet
- Bs Greek Derivation!!!!Document13 pagesBs Greek Derivation!!!!fincalNo ratings yet
- Design Concept For Jib CraneDocument12 pagesDesign Concept For Jib Cranevish5610100% (3)
- Jose Saletan Classical DynamicsDocument3 pagesJose Saletan Classical DynamicsShuX13No ratings yet
- 7D162B Pressure Drop For Double Pipe Heat Exchanger SiDocument4 pages7D162B Pressure Drop For Double Pipe Heat Exchanger SiparagmhamunkarNo ratings yet
- Orowan 1943Document29 pagesOrowan 1943Cristian Cornejo AguileraNo ratings yet
- Radial Functions and The Fourier Transform: 1 Area of A SphereDocument4 pagesRadial Functions and The Fourier Transform: 1 Area of A SphereLeonardo BossiNo ratings yet
- Phys. 3341 Homework Solution Set #3: 1 Reif 2.2Document5 pagesPhys. 3341 Homework Solution Set #3: 1 Reif 2.2Daiver JuarezNo ratings yet
- Bent Surfaces 2Document21 pagesBent Surfaces 2tackyjcNo ratings yet
- Derivation of Gamma (N Over 2)Document18 pagesDerivation of Gamma (N Over 2)Frank Waabu O'Brien (Dr. Francis J. O'Brien Jr.)100% (2)
- Chapter 2. Electrostatic II: NotesDocument29 pagesChapter 2. Electrostatic II: NotesreflectiondarkNo ratings yet
- Physics, General Relativity: Homework Due Wednesday, NovemberDocument5 pagesPhysics, General Relativity: Homework Due Wednesday, NovemberMaci CostaNo ratings yet
- Article 4Document7 pagesArticle 4pratiksharma2828No ratings yet
- Part III String Theory (Lent 2012) : Example Sheet 1 SolutionsDocument13 pagesPart III String Theory (Lent 2012) : Example Sheet 1 SolutionsΕύα ΠολίτουNo ratings yet
- 5744 Prakash Pant Solution SSMJDocument3 pages5744 Prakash Pant Solution SSMJmrr.pant92No ratings yet
- Example 21.12: Field of A Uniformly Charged DiskDocument3 pagesExample 21.12: Field of A Uniformly Charged Diskعبدالرحمن التميميNo ratings yet
- 1 Notes On Brownian Motion: 1.1 Normal DistributionDocument15 pages1 Notes On Brownian Motion: 1.1 Normal DistributionnormanNo ratings yet
- Mixed Crack PropagateDocument13 pagesMixed Crack PropagateMohammad Suriyaidulman RianseNo ratings yet
- BEC ProbeDocument3 pagesBEC ProbeThilina SenaviratneNo ratings yet
- Applied Partial Differential Equations With Fourier Series and Boundary Value Problems 5Th Edition Richard Haberman Solutions Manual Full Chapter PDFDocument36 pagesApplied Partial Differential Equations With Fourier Series and Boundary Value Problems 5Th Edition Richard Haberman Solutions Manual Full Chapter PDFgenaro.stevens426100% (15)
- Problem Set 9 Solutions: Problem 1: Griffiths Problem 8.12 (P. 362)Document6 pagesProblem Set 9 Solutions: Problem 1: Griffiths Problem 8.12 (P. 362)EniNo ratings yet
- Schrodinger FDTDDocument5 pagesSchrodinger FDTDHoussam OubahaNo ratings yet
- 2 Point Function PDFDocument1 page2 Point Function PDFKevin ChenNo ratings yet
- SML Guozhang3Document3 pagesSML Guozhang3aye pyoneNo ratings yet
- Applied Math Lecture NotesDocument20 pagesApplied Math Lecture NotesserhanNo ratings yet
- Zuber CFT LecturesDocument36 pagesZuber CFT LecturesguilleasilvaNo ratings yet
- Pol Chin SkiDocument3 pagesPol Chin SkiKevin ChenNo ratings yet
- Point Particle QuantizationDocument11 pagesPoint Particle QuantizationSarthak0% (1)
- Fourier Transforms More Dirty Tricks An Unattractive But Highly Useful ExampleDocument6 pagesFourier Transforms More Dirty Tricks An Unattractive But Highly Useful ExampleAhmedEl-MenshawiNo ratings yet
- 1 The Integral As An AntiderivativeDocument10 pages1 The Integral As An AntiderivativemrtfkhangNo ratings yet
- Gaussian IntegralDocument15 pagesGaussian Integral595250651No ratings yet
- Gaussian IntegralDocument15 pagesGaussian IntegralJuani RorNo ratings yet
- Applied Partial Differential Equations With Fourier Series and Boundary Value Problems 5th Edition Richard Haberman Solutions ManualDocument14 pagesApplied Partial Differential Equations With Fourier Series and Boundary Value Problems 5th Edition Richard Haberman Solutions Manualgeldable.abjugate84rbl100% (18)
- Mathematical Modeling and Computation in FinanceDocument4 pagesMathematical Modeling and Computation in FinanceĐạo Ninh ViệtNo ratings yet
- Robert J. Lemke OliverDocument6 pagesRobert J. Lemke OliverDipendranath MahatoNo ratings yet
- Appendix D - Gaussian StatisticsDocument2 pagesAppendix D - Gaussian StatisticsLuís Henrique AmorinNo ratings yet
- Gaussian IntegralDocument15 pagesGaussian IntegralTarun RahejaNo ratings yet
- Physics 361 Solutions To Problem Sets 3,4: 1 Typical Compressibilities and FrequenciesDocument4 pagesPhysics 361 Solutions To Problem Sets 3,4: 1 Typical Compressibilities and FrequenciessfdafNo ratings yet
- Lecture 9Document5 pagesLecture 9Jitesh HemjiNo ratings yet
- Some Basic Concepts: 1.1 Newtons Law and Inertial FramesDocument16 pagesSome Basic Concepts: 1.1 Newtons Law and Inertial Framestbrackman99No ratings yet
- Section A: Tutorial 1: Solutions: 28th February 2014Document4 pagesSection A: Tutorial 1: Solutions: 28th February 2014Kaushik NathNo ratings yet
- Lec Week7Document4 pagesLec Week7taekondoNo ratings yet
- Tut Soln WhiteDocument95 pagesTut Soln WhiteShravani KodeNo ratings yet
- Class Notes For Modern Physics Part 3Document91 pagesClass Notes For Modern Physics Part 3api-26870484No ratings yet
- Non Central Chi Square DistributionDocument16 pagesNon Central Chi Square Distributionbhavya.stats5006No ratings yet
- Hundertmark 2000Document12 pagesHundertmark 2000chemistpl420No ratings yet
- MIT16 55F14 Lecture6-7Document19 pagesMIT16 55F14 Lecture6-7Bikram RoutNo ratings yet
- Ch11 12Document21 pagesCh11 12SundarNo ratings yet
- hw2 Sol PDFDocument3 pageshw2 Sol PDFMohan BistaNo ratings yet
- 10 Lagrange Eqautions MDOFDocument3 pages10 Lagrange Eqautions MDOFsaeed al-zahraniNo ratings yet
- Error Estimates For Approximate Approximations With Gaussian Kernels On Compact IntervalsDocument11 pagesError Estimates For Approximate Approximations With Gaussian Kernels On Compact IntervalsYuanfei HuangNo ratings yet
- Dirac Delta Function As Limit of A GaussianDocument2 pagesDirac Delta Function As Limit of A Gaussianrmoliveira17No ratings yet
- Lec 14Document13 pagesLec 14semabayNo ratings yet
- 1 (A) Diameter of Single Rod D : D D L L R RDocument6 pages1 (A) Diameter of Single Rod D : D D L L R RAmbrieshKarthikNo ratings yet
- Prin EquivDocument10 pagesPrin EquivgsamsabNo ratings yet
- Lab Report #2: KeywordsDocument8 pagesLab Report #2: KeywordsIjaz AhmadNo ratings yet
- hw8 Sol PDFDocument5 pageshw8 Sol PDFBabasrinivas GuduruNo ratings yet
- 104 Spring 06 AnswDocument5 pages104 Spring 06 AnswJanry GarciaNo ratings yet
- General Solution Procedure: D W DDDocument6 pagesGeneral Solution Procedure: D W DDDilip KumarNo ratings yet
- 2021micro Hw2 AnsDocument4 pages2021micro Hw2 AnsDiana CarilloNo ratings yet
- Ashoksen SSB AhDocument19 pagesAshoksen SSB AhSarthakNo ratings yet
- Point Particle QuantizationDocument11 pagesPoint Particle QuantizationSarthak0% (1)
- The Light-Cone ApproachDocument38 pagesThe Light-Cone ApproachSarthakNo ratings yet
- Pathintegral in Quantum MechanicsDocument5 pagesPathintegral in Quantum MechanicsSarthakNo ratings yet
- QFT Notes: Sarthak DuaryDocument7 pagesQFT Notes: Sarthak DuarySarthakNo ratings yet
- 1c Energy ContourDocument4 pages1c Energy ContourSarthakNo ratings yet
- Ready Triple Pendulum Under ApproximationDocument4 pagesReady Triple Pendulum Under ApproximationSarthakNo ratings yet
- EM2019 Pset 1 VectorsFormsDocument3 pagesEM2019 Pset 1 VectorsFormsSarthakNo ratings yet
- Program Kejuruteraan Awam (2020-2021)Document82 pagesProgram Kejuruteraan Awam (2020-2021)UMMI HUMAIRAH BINTI RASHIDI MoeNo ratings yet
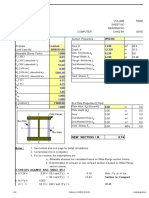
- Beam Design As Per AISC - ASD - 9thED - ModifiedDocument6 pagesBeam Design As Per AISC - ASD - 9thED - ModifiedArif RusyanaNo ratings yet
- Unit 2 Fluid Dynamics:: Dr. Naveen G Patil Assistant Professor Ajeenkya Dy Patil UniversityDocument85 pagesUnit 2 Fluid Dynamics:: Dr. Naveen G Patil Assistant Professor Ajeenkya Dy Patil UniversityShreeyash JadhavNo ratings yet
- TMH 6000 II 22Document12 pagesTMH 6000 II 22Carlos PolancoNo ratings yet
- Speed and Velocity PDFDocument17 pagesSpeed and Velocity PDFWalterVia100% (1)
- Shiv - Seenu Use NewDocument12 pagesShiv - Seenu Use NewShiv Kumar RathoreNo ratings yet
- Corrosion Fatigue - WikipediaDocument17 pagesCorrosion Fatigue - Wikipediasoumitra BanerjeeNo ratings yet
- Singularity Functions To Determine Slope and DeflectionDocument8 pagesSingularity Functions To Determine Slope and DeflectionSandipan NaskarNo ratings yet
- Force and Motion Study Guide GRADE 5Document5 pagesForce and Motion Study Guide GRADE 5Clarisse Yimyr De GuzmanNo ratings yet
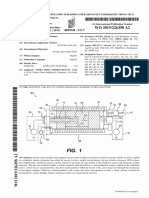
- Alpha Ring Patent WO2019226358A2Document56 pagesAlpha Ring Patent WO2019226358A2Justin FozzardNo ratings yet
- ELMS Task Weeks 12 13 Dancing Oobleck A Non Newtonian Fluid ExperimentationDocument3 pagesELMS Task Weeks 12 13 Dancing Oobleck A Non Newtonian Fluid ExperimentationLead CanadaNo ratings yet
- Spring Cont PDFDocument7 pagesSpring Cont PDFphooolNo ratings yet
- p121 RWB CombinedDocument278 pagesp121 RWB CombinedeiufjojNo ratings yet
- D6641 1166550-1Document11 pagesD6641 1166550-1khudhayer1970100% (1)
- Reciprocating: Slider-Crank Mechanism, Arrangement of Mechanical PartsDocument3 pagesReciprocating: Slider-Crank Mechanism, Arrangement of Mechanical PartsHanzlah NaseerNo ratings yet
- Chapter 3 PDFDocument46 pagesChapter 3 PDFRG RAJNo ratings yet
- Birla Institute of Technology and Science, Pilani: Pilani Campus AUGS/ AGSR DivisionDocument2 pagesBirla Institute of Technology and Science, Pilani: Pilani Campus AUGS/ AGSR DivisionParth PolNo ratings yet
- Kelompok - 03 - Modul - 2 - Laporan - IPE - 2023Document21 pagesKelompok - 03 - Modul - 2 - Laporan - IPE - 2023MichiNo ratings yet
- Sos Mdcat Test Session - 2020Document10 pagesSos Mdcat Test Session - 2020Hamza Ihsan100% (1)
- Plastic Analysis (LAB SHEET)Document7 pagesPlastic Analysis (LAB SHEET)Zulhaizat ZulkafeliNo ratings yet
- Chapter#18Document18 pagesChapter#18ShahZaib AnwarNo ratings yet
- Cirsoc Wind LoadDocument1 pageCirsoc Wind LoadTarun VermaNo ratings yet
- Mechanics of Solids 1: Engr. M.Waqas Malik 1Document43 pagesMechanics of Solids 1: Engr. M.Waqas Malik 1Ayaz AhmedNo ratings yet
- Plastic Analysis LectureDocument20 pagesPlastic Analysis LecturemartrantNo ratings yet
- Corre CeDocument29 pagesCorre CeKim VeneracionNo ratings yet
- Flow Chart AISC 358-11Document3 pagesFlow Chart AISC 358-11Willy SetiawanNo ratings yet
- (9-25) Performance Graded Bitumen SpecificationsDocument10 pages(9-25) Performance Graded Bitumen Specificationshasif21No ratings yet