Download as pdf or txt
You might also like
- Hitachi Seiki HITEC-TURN 20 25 Maintenance ManualDocument63 pagesHitachi Seiki HITEC-TURN 20 25 Maintenance ManualsunhuynhNo ratings yet
- Miyano-BNC-34T Fanuc OT G M Codes 1Document13 pagesMiyano-BNC-34T Fanuc OT G M Codes 1Nguyễn Khắc LợiNo ratings yet
- ME8451 - Manufacturing Technology - II (Ripped From Amazon Kindle Ebooks by Sai Seena)Document598 pagesME8451 - Manufacturing Technology - II (Ripped From Amazon Kindle Ebooks by Sai Seena)NaveenNo ratings yet
- Komet2800 Ba-5174 enDocument104 pagesKomet2800 Ba-5174 enalper uzunNo ratings yet
- Selecting JFET Bias Resistors For A Schoeps Type Microphone Circuit (Scope Method)Document1 pageSelecting JFET Bias Resistors For A Schoeps Type Microphone Circuit (Scope Method)Victor PastorNo ratings yet
- Broadcom 2011 Product BrochureDocument20 pagesBroadcom 2011 Product BrochureJeremy WatsonNo ratings yet
- RCR35iB (E) 04Document2 pagesRCR35iB (E) 04pc100xohmNo ratings yet
- FANUC ROBOT - (CR 4ia 7ia 7iAL 14iAL)Document2 pagesFANUC ROBOT - (CR 4ia 7ia 7iAL 14iAL)R Dinansyah PrawirasapoetraNo ratings yet
- Plastic Section Moduli For I.S. Rolled Steel Beam Sections Zpy About Y-Y AxisDocument8 pagesPlastic Section Moduli For I.S. Rolled Steel Beam Sections Zpy About Y-Y AxisIJRASETPublicationsNo ratings yet
- Rscara (E) 08Document4 pagesRscara (E) 08pc100xohmNo ratings yet
- Milling Catalog PDFDocument335 pagesMilling Catalog PDFTuấn NguyễnNo ratings yet
- Robots and Computer Controlled MachinesDocument2 pagesRobots and Computer Controlled MachinesManish SinghNo ratings yet
- Lecture 02 - GearsDocument25 pagesLecture 02 - Gearsmohammedshaiban000No ratings yet
- FANUC-M-10iA Series - 13Document2 pagesFANUC-M-10iA Series - 13Nadir ChalinNo ratings yet
- M 10ia SeriesDocument2 pagesM 10ia Seriessenior_cor73zNo ratings yet
- P-50Ia Series: IaisaDocument2 pagesP-50Ia Series: IaisaDenilson MarinhoNo ratings yet
- Threading ManualDocument17 pagesThreading ManualGerman Lobo SNo ratings yet
- Encoder Conversor Pu210 eDocument9 pagesEncoder Conversor Pu210 eChristian JuniorNo ratings yet
- Holding Bar (Optional) : Back Plunger Type Dial Indicators Series 1Document1 pageHolding Bar (Optional) : Back Plunger Type Dial Indicators Series 1somkiat kongprasiatNo ratings yet
- WRAP 9974528-Es-130316-Optimal Design of A 2-Dof Pick-And-place Parallel Robot Mmt-2013Document10 pagesWRAP 9974528-Es-130316-Optimal Design of A 2-Dof Pick-And-place Parallel Robot Mmt-2013sarascs02No ratings yet
- AE3211-I Systems Engineering and Aerospace DesignDocument69 pagesAE3211-I Systems Engineering and Aerospace DesignfuckNo ratings yet
- Geomatry SymbolDocument1 pageGeomatry Symbolfakeharsh51No ratings yet
- FANUC ROBOT - ARC Mate 100ic 120icDocument2 pagesFANUC ROBOT - ARC Mate 100ic 120icR Dinansyah PrawirasapoetraNo ratings yet
- Foundation Failure and Instability of An Offshore Jecket Structure-Case StudyDocument13 pagesFoundation Failure and Instability of An Offshore Jecket Structure-Case StudyJaimurugan KNo ratings yet
- M 20ia SeriesDocument2 pagesM 20ia SeriesDenilson MarinhoNo ratings yet
- CNC Milling Sample ProgramDocument16 pagesCNC Milling Sample ProgramjayyadavvpcNo ratings yet
- SRS Air Bag SistemDocument7 pagesSRS Air Bag SistemAlexis ValleNo ratings yet
- Arkel AR500 Gray - Binary Converte - 1 PDFDocument1 pageArkel AR500 Gray - Binary Converte - 1 PDFHenri KleineNo ratings yet
- M-16 Series: Basic DescriptionDocument2 pagesM-16 Series: Basic DescriptiondavidNo ratings yet
- M16iB FootprintDocument2 pagesM16iB Footprintto0984903132No ratings yet
- Datasheet N 813 01-2019 WebDocument6 pagesDatasheet N 813 01-2019 WebjyNo ratings yet
- AM120Document2 pagesAM120Anonymous S8SGcPucNo ratings yet
- A Testable Design of Programmable Logic Arrays With Universal Control A N D Minimal OverheadDocument15 pagesA Testable Design of Programmable Logic Arrays With Universal Control A N D Minimal Overheadgangasani lavanya reddyNo ratings yet
- Activity 2Document6 pagesActivity 2api-492104888No ratings yet
- R-2000iB Series - 316 PDFDocument4 pagesR-2000iB Series - 316 PDFSalvador BarrónNo ratings yet
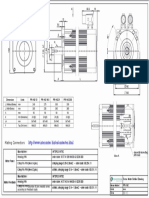
- Mating Connectors: Connector Mounting ReferenceDocument1 pageMating Connectors: Connector Mounting ReferenceBITS Controls systemNo ratings yet
- DHKJHDJKHDDDocument4 pagesDHKJHDJKHDDRavindra PawarkarNo ratings yet
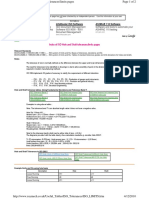
- Info ROD400 - ERN400 2003Document6 pagesInfo ROD400 - ERN400 2003trung vothaiNo ratings yet
- P-205-05 Current Transformers For Special ApplicationDocument16 pagesP-205-05 Current Transformers For Special ApplicationSarmad HussainNo ratings yet
- Project 2.3.3a G&M Codes (Absolute)Document12 pagesProject 2.3.3a G&M Codes (Absolute)Ethan SextonNo ratings yet
- Robot Kinematics: Dr.S.Kalaimagal Ceg Campus Anna University ChennaiDocument84 pagesRobot Kinematics: Dr.S.Kalaimagal Ceg Campus Anna University ChennaiKarnataka TourNo ratings yet
- Series: Corrosion Resistant Centrifugal FanDocument8 pagesSeries: Corrosion Resistant Centrifugal Fansuan170No ratings yet
- Hy-2208017 Hec12l3-40e3n-25k7-24p6-0025Document9 pagesHy-2208017 Hec12l3-40e3n-25k7-24p6-0025Ananatha KarthikNo ratings yet
- Rotor Evaluation Regarding RunoutDocument7 pagesRotor Evaluation Regarding Runoutdm mNo ratings yet
- Innovative Automation Solutions For Your Machine Tool: High Dynamic Systems From CNC Control To Motor SpindleDocument5 pagesInnovative Automation Solutions For Your Machine Tool: High Dynamic Systems From CNC Control To Motor SpindlesobheysaidNo ratings yet
- B.Tech II Year II Semester (R15) Regular Examinations May/June 2017Document2 pagesB.Tech II Year II Semester (R15) Regular Examinations May/June 2017sssssNo ratings yet
- Datasheet LRMate-200iDDocument1 pageDatasheet LRMate-200iDROBERTO CAMARGONo ratings yet
- Sixth-Generation V-Series IGBT Module Application Note - Basic Concept and FeaturesDocument11 pagesSixth-Generation V-Series IGBT Module Application Note - Basic Concept and FeaturesNA MENo ratings yet
- CW20T G Code222Document48 pagesCW20T G Code222Leo LeoNo ratings yet
- Alp For 7 Segment DisplayDocument9 pagesAlp For 7 Segment DisplayRajalakshmi SNo ratings yet
- Machine Design Practice July 2019 Assignment IIT MadrasDocument39 pagesMachine Design Practice July 2019 Assignment IIT MadrasVishwajit HegdeNo ratings yet
- TNC 370Document333 pagesTNC 370Олександр СапаровNo ratings yet
- E60H Series: Rotary EncoderDocument1 pageE60H Series: Rotary EncoderkopihitammorningbakeryNo ratings yet
- Yasnac I80m AppendixDocument339 pagesYasnac I80m AppendixsunhuynhNo ratings yet
- Yasnac I80m CNC System Appendix PDFDocument339 pagesYasnac I80m CNC System Appendix PDFobsidianghost100% (1)
- AE832: Introduction To Robotics Lab: Round 2 Experiments Experiment 1: MTAB Mini Robot Subject: Batch 8, MTAB Mini RobotDocument5 pagesAE832: Introduction To Robotics Lab: Round 2 Experiments Experiment 1: MTAB Mini Robot Subject: Batch 8, MTAB Mini RobotPravallika Yadav100% (1)
- To Switch ON Compensating Network: Input OutputDocument2 pagesTo Switch ON Compensating Network: Input OutputPiara SinghNo ratings yet
- ISO Tolerances 1Document2 pagesISO Tolerances 1Ngoc BangNo ratings yet
- Op AmpDocument17 pagesOp AmpHarvizan AlfirkiNo ratings yet
- Cylindrical Compression Helix Springs For Suspension SystemsFrom EverandCylindrical Compression Helix Springs For Suspension SystemsNo ratings yet
- List HP BaruDocument8 pagesList HP BaruCV. ARRODAH AdvertisingNo ratings yet
- Connecting To Busecure With Windows 7 Screenshot VersionDocument5 pagesConnecting To Busecure With Windows 7 Screenshot VersionAnonymous EMAJZz90No ratings yet
- Sequence Alignment: InterpretationDocument8 pagesSequence Alignment: InterpretationdahiyatejNo ratings yet
- ProfessionalismDocument2 pagesProfessionalismsamirNo ratings yet
- Calculus Self Taught Well Summarized Lecture Notes With Relevant Examples For BetterDocument31 pagesCalculus Self Taught Well Summarized Lecture Notes With Relevant Examples For BetterApril IngramNo ratings yet
- Computer Networks Ultra Short NotesDocument11 pagesComputer Networks Ultra Short NotesVishnu ShashankNo ratings yet
- Graphic Design - Lesson 1 - Webinar SlidesDocument62 pagesGraphic Design - Lesson 1 - Webinar SlidesMadhu sudarshan ReddyNo ratings yet
- 06-Fc1117auto Power Lost Without Ignition Off - Data Erratic, Intermittent, or IncorrectDocument3 pages06-Fc1117auto Power Lost Without Ignition Off - Data Erratic, Intermittent, or IncorrectSuryadiNo ratings yet
- 8-6-16-8 Update The BIOS Time (Continued) : Replacement ProceduresDocument7 pages8-6-16-8 Update The BIOS Time (Continued) : Replacement ProceduresnatnaelNo ratings yet
- Manual XLDocument45 pagesManual XLdan popNo ratings yet
- Block ModelingDocument18 pagesBlock ModelingMphNo ratings yet
- CueClub - Manual - PCDocument13 pagesCueClub - Manual - PCJames Yu100% (1)
- Hara-Kiri Muerte de Un Samurai (2011)Document2 pagesHara-Kiri Muerte de Un Samurai (2011)anon_193827573No ratings yet
- ITraffic - SAT Test Execution Tracker (03-Feb-2022)Document67 pagesITraffic - SAT Test Execution Tracker (03-Feb-2022)sweetsailu19No ratings yet
- TR225 PDFDocument2 pagesTR225 PDFErick Brandon Quintanar MartinezNo ratings yet
- Lotus Notes Tips and TricksDocument3 pagesLotus Notes Tips and TricksAshokNo ratings yet
- Apex MCQ Question1Document2 pagesApex MCQ Question1rajan251221No ratings yet
- QUIZ Answer MergedDocument31 pagesQUIZ Answer MergedPiyush GuptaNo ratings yet
- Basic Functional Safety Engineering - Pratama DipayanaDocument52 pagesBasic Functional Safety Engineering - Pratama DipayanaTim Duncan100% (1)
- Cellusys Signalling Firewall v6.7Document4 pagesCellusys Signalling Firewall v6.7Lucky AmaanNo ratings yet
- Application of Micro Controller in Vehicle Monitoring and Security SystemDocument6 pagesApplication of Micro Controller in Vehicle Monitoring and Security SystemEditor IJTSRDNo ratings yet
- Specification FOR Approval: 15.4" Wxga TFT LCD TitleDocument31 pagesSpecification FOR Approval: 15.4" Wxga TFT LCD TitleDaniel GómezNo ratings yet
- Chapter 6 Part 2Document26 pagesChapter 6 Part 2Khalid Abdirashid AbubakarNo ratings yet
- Sound Bar: Owner'S ManualDocument30 pagesSound Bar: Owner'S ManualAdmir VukovicNo ratings yet
- EEK ATA Lance: P2/V1/SWG2 TY C++ in 21 Days 31240-9 Marcia 7.9.98 FM LP#2Document15 pagesEEK ATA Lance: P2/V1/SWG2 TY C++ in 21 Days 31240-9 Marcia 7.9.98 FM LP#2Abdulganiyu TeslimNo ratings yet
- Oracle Erp Cloud Implementation Leading Practices WPDocument35 pagesOracle Erp Cloud Implementation Leading Practices WPMiguel Felicio100% (1)
- Tanveer - Sr. Linux EngineerDocument5 pagesTanveer - Sr. Linux EngineerChilly07No ratings yet
- Case Study: Honeywell Video Technology Helps Protect Largest Privately-Funded Construction Project in U.S. HistoryDocument2 pagesCase Study: Honeywell Video Technology Helps Protect Largest Privately-Funded Construction Project in U.S. History0 HourNo ratings yet
- Reference of LFSR AesDocument21 pagesReference of LFSR AesK.KALAISELVI HICET STAFF ECENo ratings yet