
GNU/Linux and FPGA in Real-Time Control Applications: Pavel Pisa Pisa@cmp - Felk.cvut - CZ CC By-Sa
GNU/Linux and FPGA in Real-Time Control Applications: Pavel Pisa Pisa@cmp - Felk.cvut - CZ CC By-Sa
You might also like
- Construction CompaniesDocument24 pagesConstruction Companiesmanup1980100% (1)
- Encyclopedia of Chemical Processing - S Lee (Taylor and Francis, 2006) WW PDFDocument3,338 pagesEncyclopedia of Chemical Processing - S Lee (Taylor and Francis, 2006) WW PDFMahfuzur Rahman SiddikyNo ratings yet
- PGM Based Profibus - UpdatedDocument58 pagesPGM Based Profibus - UpdatedpianuelsNo ratings yet
- PLC RX3iDocument13 pagesPLC RX3iWidyaRevelation100% (1)
- 01 03 Pcie 3 1 Protocol FrozenDocument33 pages01 03 Pcie 3 1 Protocol FrozenKAJANo ratings yet
- Prototyping Advanced Control Systems On FPGADocument14 pagesPrototyping Advanced Control Systems On FPGAKhaled IsmailNo ratings yet
- Pcie-1473R Camera Link Frame Grabber With Fpga Image ProcessingDocument7 pagesPcie-1473R Camera Link Frame Grabber With Fpga Image ProcessingWatchara ToahngernNo ratings yet
- Why FPGAs Are Better Than D..Document4 pagesWhy FPGAs Are Better Than D..neuroXPTONo ratings yet
- Trends in Distributed Control Systems: Dr. G.U. Spohr Siemens A&D ST2Document22 pagesTrends in Distributed Control Systems: Dr. G.U. Spohr Siemens A&D ST2Hhaabbde SybaritzNo ratings yet
- AOS8 Influxdb GrafanaDocument66 pagesAOS8 Influxdb GrafanaYuda YudaNo ratings yet
- Xilinx XC2C512-10FTG256I - Wireless Technology - Internet of ThingsDocument5 pagesXilinx XC2C512-10FTG256I - Wireless Technology - Internet of ThingsjackNo ratings yet
- DIFC ArubaDocument553 pagesDIFC ArubaLeion UchihaNo ratings yet
- Fpga SlidesDocument20 pagesFpga Slidesankit407No ratings yet
- Spartan 3 BoardDocument22 pagesSpartan 3 Boardsureshfm1No ratings yet
- BRKRST 3067Document139 pagesBRKRST 3067Ankit SharmaNo ratings yet
- Software - Platform (Automation Builder) - ABBDocument12 pagesSoftware - Platform (Automation Builder) - ABBIrlan LeiteNo ratings yet
- PLC - BMS - Poc - Test - NTT DCDocument6 pagesPLC - BMS - Poc - Test - NTT DCUpasana Ashok PatilNo ratings yet
- What Is An FPGA?: Figure 1: FPGA Block StructureDocument10 pagesWhat Is An FPGA?: Figure 1: FPGA Block Structureacer551100% (1)
- Cours Nios AlteraDocument76 pagesCours Nios AlteraAjeeshAzeezNo ratings yet
- Documents - MX Designing With The Nios II Processor and Qsys 1day 11 0 ModifiedDocument197 pagesDocuments - MX Designing With The Nios II Processor and Qsys 1day 11 0 Modifiedrpfr0No ratings yet
- Hagen Woesner Open Source VBNG Architecture and Performance EvaluationDocument40 pagesHagen Woesner Open Source VBNG Architecture and Performance EvaluationSatyaki StudentNo ratings yet
- Where To Buy Xilinx XC18V01PC20C FPGADocument5 pagesWhere To Buy Xilinx XC18V01PC20C FPGAjackNo ratings yet
- Xilinx XC2C128-6VQG100C - 5G Technology - Cloud ComputingDocument4 pagesXilinx XC2C128-6VQG100C - 5G Technology - Cloud ComputingjackNo ratings yet
- Xilinx XC2C256-7FT256I - Internet of Things - Artificial IntelligenceDocument5 pagesXilinx XC2C256-7FT256I - Internet of Things - Artificial IntelligencejackNo ratings yet
- Xilinx XC2C64A-7QFG48I - Medical Equipment - Artificial IntelligenceDocument4 pagesXilinx XC2C64A-7QFG48I - Medical Equipment - Artificial IntelligencejackNo ratings yet
- Xilinx XC2C256-7VQ100I - Consumer Electronics - Wireless TechnologyDocument5 pagesXilinx XC2C256-7VQ100I - Consumer Electronics - Wireless TechnologyjackNo ratings yet
- Fpga Motor Control Reference Design: Spartan™-3 Microblaze™Document15 pagesFpga Motor Control Reference Design: Spartan™-3 Microblaze™ASOCIACION ATECUBONo ratings yet
- Xilinx XC2C512-10PQ208I - 5G Technology - Industrial ControlDocument5 pagesXilinx XC2C512-10PQ208I - 5G Technology - Industrial ControljackNo ratings yet
- Differences Between Huawei ATCA-Based and CPCI-Based SoftSwitches ISSUE2.0Document46 pagesDifferences Between Huawei ATCA-Based and CPCI-Based SoftSwitches ISSUE2.0Syed Tassadaq100% (3)
- 3332 E Automation Technology With Siemens PLCDocument89 pages3332 E Automation Technology With Siemens PLCShamendu Roy RohitNo ratings yet
- Pico Blaze IntroDocument71 pagesPico Blaze IntroAlexNo ratings yet
- FPGA Paper PDFDocument18 pagesFPGA Paper PDFDhayanandhNo ratings yet
- Hardware in The Loop - Closed Loop - ExperimentsDocument8 pagesHardware in The Loop - Closed Loop - ExperimentsJoel LandívarNo ratings yet
- How Does FPGA Work: OutlineDocument17 pagesHow Does FPGA Work: OutlinehariharankalyanNo ratings yet
- STEP 7 V14 New Functions PDFDocument51 pagesSTEP 7 V14 New Functions PDFtrial12No ratings yet
- FPGA Lect3Document93 pagesFPGA Lect3Amit JoshiNo ratings yet
- How To Program, Architecture, and Applications of Lattice FPGADocument23 pagesHow To Program, Architecture, and Applications of Lattice FPGAjackNo ratings yet
- Xilinx XC2C256-7TQ144I - Wireless Technology - Consumer ElectronicsDocument5 pagesXilinx XC2C256-7TQ144I - Wireless Technology - Consumer ElectronicsjackNo ratings yet
- Chapter 1Document80 pagesChapter 1Praveena NeppalliNo ratings yet
- DatasheetDocument13 pagesDatasheetAshok GudivadaNo ratings yet
- Stepper Motor Implementation On FPGA (1) With 1.5 FinalDocument61 pagesStepper Motor Implementation On FPGA (1) With 1.5 Finalswati sakhare100% (1)
- Learning TargetDocument4 pagesLearning TargetTechworx ElectricNo ratings yet
- Xilinx XC2C128-7VQG100I - Medical Equipment - 5G TechnologyDocument4 pagesXilinx XC2C128-7VQG100I - Medical Equipment - 5G TechnologyjackNo ratings yet
- Xilinx XC2C256-7FTG256I - Internet of Things - 5G TechnologyDocument5 pagesXilinx XC2C256-7FTG256I - Internet of Things - 5G TechnologyjackNo ratings yet
- Ref 47 PDFDocument6 pagesRef 47 PDFAli H. NumanNo ratings yet
- Ethernet To MPI DP PPI Converter For SIMATIC S7®Document2 pagesEthernet To MPI DP PPI Converter For SIMATIC S7®SyariefNo ratings yet
- Training BrochureDocument2 pagesTraining Brochuremrbundle3129No ratings yet
- PDF 24Document3 pagesPDF 24AmonsivaisNo ratings yet
- Palladium z1 Ds PDFDocument7 pagesPalladium z1 Ds PDFSlavica DjukanovicNo ratings yet
- Xilinx XC2C256-7CP132I - Cloud Computing - Artificial IntelligenceDocument5 pagesXilinx XC2C256-7CP132I - Cloud Computing - Artificial IntelligencejackNo ratings yet
- Programming Vision Applications On Zynq Using Opencv and High-Level SynthesisDocument11 pagesProgramming Vision Applications On Zynq Using Opencv and High-Level SynthesisenockbernardNo ratings yet
- Pic18 Pulse Width Modulation (PWM) DC Motor Speed Controller With The RPM Counter Project ErmicroblogDocument15 pagesPic18 Pulse Width Modulation (PWM) DC Motor Speed Controller With The RPM Counter Project Ermicroblogcreationist100% (2)
- DCS FundamentalsDocument64 pagesDCS FundamentalsLugabaluga100% (1)
- Component Based Automation: © Siemens AG 2008Document36 pagesComponent Based Automation: © Siemens AG 2008Qayyum FaizNo ratings yet
- Xilinx XC2C64A-7VQG100C - Industrial Control - Wireless TechnologyDocument4 pagesXilinx XC2C64A-7VQG100C - Industrial Control - Wireless TechnologyjackNo ratings yet
- SDN Architecture and Ecosystem (SC) IIDocument90 pagesSDN Architecture and Ecosystem (SC) IIdfssgrNo ratings yet
- Xilinx XC2C256-7VQG100I - Medical Equipment - Industrial ControlDocument5 pagesXilinx XC2C256-7VQG100I - Medical Equipment - Industrial ControljackNo ratings yet
- Altera Five Ways To Build Flexibility Into Industrial Applications With FPGAsDocument15 pagesAltera Five Ways To Build Flexibility Into Industrial Applications With FPGAskn65238859No ratings yet
- Xilinx XC2C128-7VQ100C - Artificial Intelligence - Cloud ComputingDocument4 pagesXilinx XC2C128-7VQ100C - Artificial Intelligence - Cloud ComputingjackNo ratings yet
- Unit I Embedded SystemDocument42 pagesUnit I Embedded Systemkarthick707No ratings yet
- PLC: Programmable Logic Controller – Arktika.: EXPERIMENTAL PRODUCT BASED ON CPLD.From EverandPLC: Programmable Logic Controller – Arktika.: EXPERIMENTAL PRODUCT BASED ON CPLD.No ratings yet
- CISCO PACKET TRACER LABS: Best practice of configuring or troubleshooting NetworkFrom EverandCISCO PACKET TRACER LABS: Best practice of configuring or troubleshooting NetworkNo ratings yet
- Moc SC Vtol Issue 2 12-May-2021 Shaded 0Document89 pagesMoc SC Vtol Issue 2 12-May-2021 Shaded 0VitaliyGNo ratings yet
- ENG DS 1-1773870-7 Filter-Connector 0616Document74 pagesENG DS 1-1773870-7 Filter-Connector 0616VitaliyGNo ratings yet
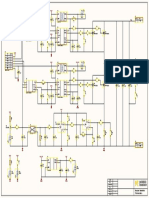
- Schematic Half-Bridge ModuleDocument1 pageSchematic Half-Bridge ModuleVitaliyGNo ratings yet
- MC13783 Buck and Boost Inductor Sizing: Application NoteDocument8 pagesMC13783 Buck and Boost Inductor Sizing: Application NoteVitaliyGNo ratings yet
- Sciencedirect: A B C A B CDocument9 pagesSciencedirect: A B C A B CVitaliyGNo ratings yet
- Application Note AN-1214: LED Buck Converter Design Using The IRS2505LDocument16 pagesApplication Note AN-1214: LED Buck Converter Design Using The IRS2505LVitaliyGNo ratings yet
- A 1 V Low-Noise CMOS Amplifier Using Autozeroing and Chopper Stabilization TechniqueDocument6 pagesA 1 V Low-Noise CMOS Amplifier Using Autozeroing and Chopper Stabilization TechniqueVitaliyGNo ratings yet
- A Low Power Low Noise Chopper-Stabilized Tow-Stage Operational Amplifier For Portable Bio-Potential Acquisition Systems Using 90 NM TechnologyDocument18 pagesA Low Power Low Noise Chopper-Stabilized Tow-Stage Operational Amplifier For Portable Bio-Potential Acquisition Systems Using 90 NM TechnologyVitaliyGNo ratings yet
- 01177a PDFDocument14 pages01177a PDFVitaliyGNo ratings yet
- 003 PDFDocument37 pages003 PDFVitaliyGNo ratings yet
- A Different Approach On Pythagorean Triangle, Which SatisfiesDocument4 pagesA Different Approach On Pythagorean Triangle, Which SatisfiesVitaliyGNo ratings yet
- Anderson Distribution of The Correlation CoefficientDocument14 pagesAnderson Distribution of The Correlation Coefficientdauren_pcNo ratings yet
- FSM 2000Document52 pagesFSM 2000aram_hNo ratings yet
- 12life Saving RulesDocument33 pages12life Saving RulesLakshmi Kanth P100% (1)
- Envisci Revised FloodingDocument5 pagesEnvisci Revised Floodingrjosephine529No ratings yet
- 2003 Nissan Maxima NaviDocument167 pages2003 Nissan Maxima NaviMarco OchoaNo ratings yet
- GRP 3 Keesha & Marie Faye Abdellah Power Point FINALDocument10 pagesGRP 3 Keesha & Marie Faye Abdellah Power Point FINALevangelo22656No ratings yet
- Digital Business Strategy:: Harnessing Our Digital FutureDocument9 pagesDigital Business Strategy:: Harnessing Our Digital FutureAndyBarredaMoscosoNo ratings yet
- Clinical Pharmacology ReviewerDocument12 pagesClinical Pharmacology ReviewerSister RislyNo ratings yet
- Geotechnical Properties of Dublin Boulder ClayDocument18 pagesGeotechnical Properties of Dublin Boulder ClayBLPgalwayNo ratings yet
- A Court Case On Letters of Credit & UCP600Document2 pagesA Court Case On Letters of Credit & UCP600gmat1287No ratings yet
- Edwin Maturino - Benchmark Reviving The Professional CultureDocument9 pagesEdwin Maturino - Benchmark Reviving The Professional Cultureapi-693631580No ratings yet
- The Vivekanand School: Annual Exam Session: 2022-2023Document6 pagesThe Vivekanand School: Annual Exam Session: 2022-2023chaitanya goyalNo ratings yet
- Eng/Npd Girish Comprehen Sive Charan Marketing: Internal Quality Audit Schedule No:Qms Ia-1Document1 pageEng/Npd Girish Comprehen Sive Charan Marketing: Internal Quality Audit Schedule No:Qms Ia-1DhinakaranNo ratings yet
- Emflon PFRW Filter Cartridges: For Sterile Filtration of GasesDocument3 pagesEmflon PFRW Filter Cartridges: For Sterile Filtration of GasesRichard BakerNo ratings yet
- Fitel S199M24 Spec SheetDocument1 pageFitel S199M24 Spec SheetcolinyNo ratings yet
- OPM Costing Fundamentals - ActualDocument21 pagesOPM Costing Fundamentals - Actualkhaled_ghrbia100% (1)
- Mycoplasma Infection PDFDocument3 pagesMycoplasma Infection PDFPrirodna Kozmetika Brem100% (1)
- Um Ugm2006 BinggDocument3 pagesUm Ugm2006 BinggZanaNiswahNabilaNo ratings yet
- CMP 1 1 CDPDocument11 pagesCMP 1 1 CDPSachin NakadeNo ratings yet
- Atalla A10160Document4 pagesAtalla A10160FERNANDO JOSE GARCIA FIGUEROANo ratings yet
- Bluetooth 4.2 SpecificationDocument2,772 pagesBluetooth 4.2 SpecificationScott PooleNo ratings yet
- Curso de Ingles Units 9 To 19 2012Document58 pagesCurso de Ingles Units 9 To 19 2012David AntonioNo ratings yet
- MFI 2 - Unit 3 - SB - L+SDocument10 pagesMFI 2 - Unit 3 - SB - L+SHoan HoàngNo ratings yet
- Countries and Diplomas Diploma Requirements Wageningen University 2023/2024Document11 pagesCountries and Diplomas Diploma Requirements Wageningen University 2023/2024JuliaNo ratings yet
- Intoxicación Alimentaria Por Consumo de Atún Rojo Del Pacífico-Caso ClínicoDocument3 pagesIntoxicación Alimentaria Por Consumo de Atún Rojo Del Pacífico-Caso ClínicoJose MuñozNo ratings yet
- Questionnaire For Tourist Satisfaction in Taiwanese Hot Springs TourismDocument2 pagesQuestionnaire For Tourist Satisfaction in Taiwanese Hot Springs TourismAmeer Akram100% (5)
- Bulletin Low Res 2Document19 pagesBulletin Low Res 2Аксана ГатауллинаNo ratings yet
- Assignment 1 - 2020 PDFDocument2 pagesAssignment 1 - 2020 PDFLusambo SimpasaNo ratings yet


































































































Download as pdf or txt
You might also like
- Construction CompaniesDocument24 pagesConstruction Companiesmanup1980100% (1)
- Encyclopedia of Chemical Processing - S Lee (Taylor and Francis, 2006) WW PDFDocument3,338 pagesEncyclopedia of Chemical Processing - S Lee (Taylor and Francis, 2006) WW PDFMahfuzur Rahman SiddikyNo ratings yet
- PGM Based Profibus - UpdatedDocument58 pagesPGM Based Profibus - UpdatedpianuelsNo ratings yet
- PLC RX3iDocument13 pagesPLC RX3iWidyaRevelation100% (1)
- 01 03 Pcie 3 1 Protocol FrozenDocument33 pages01 03 Pcie 3 1 Protocol FrozenKAJANo ratings yet
- Prototyping Advanced Control Systems On FPGADocument14 pagesPrototyping Advanced Control Systems On FPGAKhaled IsmailNo ratings yet
- Pcie-1473R Camera Link Frame Grabber With Fpga Image ProcessingDocument7 pagesPcie-1473R Camera Link Frame Grabber With Fpga Image ProcessingWatchara ToahngernNo ratings yet
- Why FPGAs Are Better Than D..Document4 pagesWhy FPGAs Are Better Than D..neuroXPTONo ratings yet
- Trends in Distributed Control Systems: Dr. G.U. Spohr Siemens A&D ST2Document22 pagesTrends in Distributed Control Systems: Dr. G.U. Spohr Siemens A&D ST2Hhaabbde SybaritzNo ratings yet
- AOS8 Influxdb GrafanaDocument66 pagesAOS8 Influxdb GrafanaYuda YudaNo ratings yet
- Xilinx XC2C512-10FTG256I - Wireless Technology - Internet of ThingsDocument5 pagesXilinx XC2C512-10FTG256I - Wireless Technology - Internet of ThingsjackNo ratings yet
- DIFC ArubaDocument553 pagesDIFC ArubaLeion UchihaNo ratings yet
- Fpga SlidesDocument20 pagesFpga Slidesankit407No ratings yet
- Spartan 3 BoardDocument22 pagesSpartan 3 Boardsureshfm1No ratings yet
- BRKRST 3067Document139 pagesBRKRST 3067Ankit SharmaNo ratings yet
- Software - Platform (Automation Builder) - ABBDocument12 pagesSoftware - Platform (Automation Builder) - ABBIrlan LeiteNo ratings yet
- PLC - BMS - Poc - Test - NTT DCDocument6 pagesPLC - BMS - Poc - Test - NTT DCUpasana Ashok PatilNo ratings yet
- What Is An FPGA?: Figure 1: FPGA Block StructureDocument10 pagesWhat Is An FPGA?: Figure 1: FPGA Block Structureacer551100% (1)
- Cours Nios AlteraDocument76 pagesCours Nios AlteraAjeeshAzeezNo ratings yet
- Documents - MX Designing With The Nios II Processor and Qsys 1day 11 0 ModifiedDocument197 pagesDocuments - MX Designing With The Nios II Processor and Qsys 1day 11 0 Modifiedrpfr0No ratings yet
- Hagen Woesner Open Source VBNG Architecture and Performance EvaluationDocument40 pagesHagen Woesner Open Source VBNG Architecture and Performance EvaluationSatyaki StudentNo ratings yet
- Where To Buy Xilinx XC18V01PC20C FPGADocument5 pagesWhere To Buy Xilinx XC18V01PC20C FPGAjackNo ratings yet
- Xilinx XC2C128-6VQG100C - 5G Technology - Cloud ComputingDocument4 pagesXilinx XC2C128-6VQG100C - 5G Technology - Cloud ComputingjackNo ratings yet
- Xilinx XC2C256-7FT256I - Internet of Things - Artificial IntelligenceDocument5 pagesXilinx XC2C256-7FT256I - Internet of Things - Artificial IntelligencejackNo ratings yet
- Xilinx XC2C64A-7QFG48I - Medical Equipment - Artificial IntelligenceDocument4 pagesXilinx XC2C64A-7QFG48I - Medical Equipment - Artificial IntelligencejackNo ratings yet
- Xilinx XC2C256-7VQ100I - Consumer Electronics - Wireless TechnologyDocument5 pagesXilinx XC2C256-7VQ100I - Consumer Electronics - Wireless TechnologyjackNo ratings yet
- Fpga Motor Control Reference Design: Spartan™-3 Microblaze™Document15 pagesFpga Motor Control Reference Design: Spartan™-3 Microblaze™ASOCIACION ATECUBONo ratings yet
- Xilinx XC2C512-10PQ208I - 5G Technology - Industrial ControlDocument5 pagesXilinx XC2C512-10PQ208I - 5G Technology - Industrial ControljackNo ratings yet
- Differences Between Huawei ATCA-Based and CPCI-Based SoftSwitches ISSUE2.0Document46 pagesDifferences Between Huawei ATCA-Based and CPCI-Based SoftSwitches ISSUE2.0Syed Tassadaq100% (3)
- 3332 E Automation Technology With Siemens PLCDocument89 pages3332 E Automation Technology With Siemens PLCShamendu Roy RohitNo ratings yet
- Pico Blaze IntroDocument71 pagesPico Blaze IntroAlexNo ratings yet
- FPGA Paper PDFDocument18 pagesFPGA Paper PDFDhayanandhNo ratings yet
- Hardware in The Loop - Closed Loop - ExperimentsDocument8 pagesHardware in The Loop - Closed Loop - ExperimentsJoel LandívarNo ratings yet
- How Does FPGA Work: OutlineDocument17 pagesHow Does FPGA Work: OutlinehariharankalyanNo ratings yet
- STEP 7 V14 New Functions PDFDocument51 pagesSTEP 7 V14 New Functions PDFtrial12No ratings yet
- FPGA Lect3Document93 pagesFPGA Lect3Amit JoshiNo ratings yet
- How To Program, Architecture, and Applications of Lattice FPGADocument23 pagesHow To Program, Architecture, and Applications of Lattice FPGAjackNo ratings yet
- Xilinx XC2C256-7TQ144I - Wireless Technology - Consumer ElectronicsDocument5 pagesXilinx XC2C256-7TQ144I - Wireless Technology - Consumer ElectronicsjackNo ratings yet
- Chapter 1Document80 pagesChapter 1Praveena NeppalliNo ratings yet
- DatasheetDocument13 pagesDatasheetAshok GudivadaNo ratings yet
- Stepper Motor Implementation On FPGA (1) With 1.5 FinalDocument61 pagesStepper Motor Implementation On FPGA (1) With 1.5 Finalswati sakhare100% (1)
- Learning TargetDocument4 pagesLearning TargetTechworx ElectricNo ratings yet
- Xilinx XC2C128-7VQG100I - Medical Equipment - 5G TechnologyDocument4 pagesXilinx XC2C128-7VQG100I - Medical Equipment - 5G TechnologyjackNo ratings yet
- Xilinx XC2C256-7FTG256I - Internet of Things - 5G TechnologyDocument5 pagesXilinx XC2C256-7FTG256I - Internet of Things - 5G TechnologyjackNo ratings yet
- Ref 47 PDFDocument6 pagesRef 47 PDFAli H. NumanNo ratings yet
- Ethernet To MPI DP PPI Converter For SIMATIC S7®Document2 pagesEthernet To MPI DP PPI Converter For SIMATIC S7®SyariefNo ratings yet
- Training BrochureDocument2 pagesTraining Brochuremrbundle3129No ratings yet
- PDF 24Document3 pagesPDF 24AmonsivaisNo ratings yet
- Palladium z1 Ds PDFDocument7 pagesPalladium z1 Ds PDFSlavica DjukanovicNo ratings yet
- Xilinx XC2C256-7CP132I - Cloud Computing - Artificial IntelligenceDocument5 pagesXilinx XC2C256-7CP132I - Cloud Computing - Artificial IntelligencejackNo ratings yet
- Programming Vision Applications On Zynq Using Opencv and High-Level SynthesisDocument11 pagesProgramming Vision Applications On Zynq Using Opencv and High-Level SynthesisenockbernardNo ratings yet
- Pic18 Pulse Width Modulation (PWM) DC Motor Speed Controller With The RPM Counter Project ErmicroblogDocument15 pagesPic18 Pulse Width Modulation (PWM) DC Motor Speed Controller With The RPM Counter Project Ermicroblogcreationist100% (2)
- DCS FundamentalsDocument64 pagesDCS FundamentalsLugabaluga100% (1)
- Component Based Automation: © Siemens AG 2008Document36 pagesComponent Based Automation: © Siemens AG 2008Qayyum FaizNo ratings yet
- Xilinx XC2C64A-7VQG100C - Industrial Control - Wireless TechnologyDocument4 pagesXilinx XC2C64A-7VQG100C - Industrial Control - Wireless TechnologyjackNo ratings yet
- SDN Architecture and Ecosystem (SC) IIDocument90 pagesSDN Architecture and Ecosystem (SC) IIdfssgrNo ratings yet
- Xilinx XC2C256-7VQG100I - Medical Equipment - Industrial ControlDocument5 pagesXilinx XC2C256-7VQG100I - Medical Equipment - Industrial ControljackNo ratings yet
- Altera Five Ways To Build Flexibility Into Industrial Applications With FPGAsDocument15 pagesAltera Five Ways To Build Flexibility Into Industrial Applications With FPGAskn65238859No ratings yet
- Xilinx XC2C128-7VQ100C - Artificial Intelligence - Cloud ComputingDocument4 pagesXilinx XC2C128-7VQ100C - Artificial Intelligence - Cloud ComputingjackNo ratings yet
- Unit I Embedded SystemDocument42 pagesUnit I Embedded Systemkarthick707No ratings yet
- PLC: Programmable Logic Controller – Arktika.: EXPERIMENTAL PRODUCT BASED ON CPLD.From EverandPLC: Programmable Logic Controller – Arktika.: EXPERIMENTAL PRODUCT BASED ON CPLD.No ratings yet
- CISCO PACKET TRACER LABS: Best practice of configuring or troubleshooting NetworkFrom EverandCISCO PACKET TRACER LABS: Best practice of configuring or troubleshooting NetworkNo ratings yet
- Moc SC Vtol Issue 2 12-May-2021 Shaded 0Document89 pagesMoc SC Vtol Issue 2 12-May-2021 Shaded 0VitaliyGNo ratings yet
- ENG DS 1-1773870-7 Filter-Connector 0616Document74 pagesENG DS 1-1773870-7 Filter-Connector 0616VitaliyGNo ratings yet
- Schematic Half-Bridge ModuleDocument1 pageSchematic Half-Bridge ModuleVitaliyGNo ratings yet
- MC13783 Buck and Boost Inductor Sizing: Application NoteDocument8 pagesMC13783 Buck and Boost Inductor Sizing: Application NoteVitaliyGNo ratings yet
- Sciencedirect: A B C A B CDocument9 pagesSciencedirect: A B C A B CVitaliyGNo ratings yet
- Application Note AN-1214: LED Buck Converter Design Using The IRS2505LDocument16 pagesApplication Note AN-1214: LED Buck Converter Design Using The IRS2505LVitaliyGNo ratings yet
- A 1 V Low-Noise CMOS Amplifier Using Autozeroing and Chopper Stabilization TechniqueDocument6 pagesA 1 V Low-Noise CMOS Amplifier Using Autozeroing and Chopper Stabilization TechniqueVitaliyGNo ratings yet
- A Low Power Low Noise Chopper-Stabilized Tow-Stage Operational Amplifier For Portable Bio-Potential Acquisition Systems Using 90 NM TechnologyDocument18 pagesA Low Power Low Noise Chopper-Stabilized Tow-Stage Operational Amplifier For Portable Bio-Potential Acquisition Systems Using 90 NM TechnologyVitaliyGNo ratings yet
- 01177a PDFDocument14 pages01177a PDFVitaliyGNo ratings yet
- 003 PDFDocument37 pages003 PDFVitaliyGNo ratings yet
- A Different Approach On Pythagorean Triangle, Which SatisfiesDocument4 pagesA Different Approach On Pythagorean Triangle, Which SatisfiesVitaliyGNo ratings yet
- Anderson Distribution of The Correlation CoefficientDocument14 pagesAnderson Distribution of The Correlation Coefficientdauren_pcNo ratings yet
- FSM 2000Document52 pagesFSM 2000aram_hNo ratings yet
- 12life Saving RulesDocument33 pages12life Saving RulesLakshmi Kanth P100% (1)
- Envisci Revised FloodingDocument5 pagesEnvisci Revised Floodingrjosephine529No ratings yet
- 2003 Nissan Maxima NaviDocument167 pages2003 Nissan Maxima NaviMarco OchoaNo ratings yet
- GRP 3 Keesha & Marie Faye Abdellah Power Point FINALDocument10 pagesGRP 3 Keesha & Marie Faye Abdellah Power Point FINALevangelo22656No ratings yet
- Digital Business Strategy:: Harnessing Our Digital FutureDocument9 pagesDigital Business Strategy:: Harnessing Our Digital FutureAndyBarredaMoscosoNo ratings yet
- Clinical Pharmacology ReviewerDocument12 pagesClinical Pharmacology ReviewerSister RislyNo ratings yet
- Geotechnical Properties of Dublin Boulder ClayDocument18 pagesGeotechnical Properties of Dublin Boulder ClayBLPgalwayNo ratings yet
- A Court Case On Letters of Credit & UCP600Document2 pagesA Court Case On Letters of Credit & UCP600gmat1287No ratings yet
- Edwin Maturino - Benchmark Reviving The Professional CultureDocument9 pagesEdwin Maturino - Benchmark Reviving The Professional Cultureapi-693631580No ratings yet
- The Vivekanand School: Annual Exam Session: 2022-2023Document6 pagesThe Vivekanand School: Annual Exam Session: 2022-2023chaitanya goyalNo ratings yet
- Eng/Npd Girish Comprehen Sive Charan Marketing: Internal Quality Audit Schedule No:Qms Ia-1Document1 pageEng/Npd Girish Comprehen Sive Charan Marketing: Internal Quality Audit Schedule No:Qms Ia-1DhinakaranNo ratings yet
- Emflon PFRW Filter Cartridges: For Sterile Filtration of GasesDocument3 pagesEmflon PFRW Filter Cartridges: For Sterile Filtration of GasesRichard BakerNo ratings yet
- Fitel S199M24 Spec SheetDocument1 pageFitel S199M24 Spec SheetcolinyNo ratings yet
- OPM Costing Fundamentals - ActualDocument21 pagesOPM Costing Fundamentals - Actualkhaled_ghrbia100% (1)
- Mycoplasma Infection PDFDocument3 pagesMycoplasma Infection PDFPrirodna Kozmetika Brem100% (1)
- Um Ugm2006 BinggDocument3 pagesUm Ugm2006 BinggZanaNiswahNabilaNo ratings yet
- CMP 1 1 CDPDocument11 pagesCMP 1 1 CDPSachin NakadeNo ratings yet
- Atalla A10160Document4 pagesAtalla A10160FERNANDO JOSE GARCIA FIGUEROANo ratings yet
- Bluetooth 4.2 SpecificationDocument2,772 pagesBluetooth 4.2 SpecificationScott PooleNo ratings yet
- Curso de Ingles Units 9 To 19 2012Document58 pagesCurso de Ingles Units 9 To 19 2012David AntonioNo ratings yet
- MFI 2 - Unit 3 - SB - L+SDocument10 pagesMFI 2 - Unit 3 - SB - L+SHoan HoàngNo ratings yet
- Countries and Diplomas Diploma Requirements Wageningen University 2023/2024Document11 pagesCountries and Diplomas Diploma Requirements Wageningen University 2023/2024JuliaNo ratings yet
- Intoxicación Alimentaria Por Consumo de Atún Rojo Del Pacífico-Caso ClínicoDocument3 pagesIntoxicación Alimentaria Por Consumo de Atún Rojo Del Pacífico-Caso ClínicoJose MuñozNo ratings yet
- Questionnaire For Tourist Satisfaction in Taiwanese Hot Springs TourismDocument2 pagesQuestionnaire For Tourist Satisfaction in Taiwanese Hot Springs TourismAmeer Akram100% (5)
- Bulletin Low Res 2Document19 pagesBulletin Low Res 2Аксана ГатауллинаNo ratings yet
- Assignment 1 - 2020 PDFDocument2 pagesAssignment 1 - 2020 PDFLusambo SimpasaNo ratings yet