
Download as pdf or txt
You might also like
- Math 30-1 Review PackageDocument28 pagesMath 30-1 Review PackageMarc Lambert100% (1)
- Gear Guide1Document57 pagesGear Guide1dedemuamariskandar88No ratings yet
- Catalog English 2018 - RobotsDocument320 pagesCatalog English 2018 - RobotsRobertoAlexandreSchöpfNo ratings yet
- Gear - Introduction and ClassificationDocument4 pagesGear - Introduction and Classificationraja020No ratings yet
- Chapter 1-Gear SystemDocument28 pagesChapter 1-Gear Systemazim100% (1)
- Chapter 1-Gear SystemDocument27 pagesChapter 1-Gear SystemDanielRao100% (2)
- 1.2 Types-of-Gear TechnicalData KGSTOCKGEARSDocument5 pages1.2 Types-of-Gear TechnicalData KGSTOCKGEARSraj6062No ratings yet
- Bevel GearDocument13 pagesBevel GearADII 2701No ratings yet
- Three Wheeler Auto Tilting Vehicle PPT 17 AbhishekDocument18 pagesThree Wheeler Auto Tilting Vehicle PPT 17 AbhishekAnjali BiramaneNo ratings yet
- 2A Bevel GearDocument74 pages2A Bevel GearChetan AgroyaNo ratings yet
- An Atlas of Structures, Mechanisms, and RobotsDocument27 pagesAn Atlas of Structures, Mechanisms, and RobotsDIBUJO INDUSTRIAL100% (1)
- Controlling of A 360 Degree Rotating Vehicle With Arduino and Bluetooth Module Updated.Document19 pagesControlling of A 360 Degree Rotating Vehicle With Arduino and Bluetooth Module Updated.Aditya ChavanNo ratings yet
- Design and Fabrication of Chainless Bicy PDFDocument6 pagesDesign and Fabrication of Chainless Bicy PDFFranklin Delano JuniorNo ratings yet
- 3004lecture 9 HandoutDocument48 pages3004lecture 9 HandoutPhil SUNNo ratings yet
- Updated Mini Project Report 1Document19 pagesUpdated Mini Project Report 1AishwaryaNo ratings yet
- UME1601: Design of Mechanical Drives: Bevel, Worm and Cross Helical GearsDocument21 pagesUME1601: Design of Mechanical Drives: Bevel, Worm and Cross Helical GearsAkshay JaykrishnanNo ratings yet
- RTV-X900 SpecsDocument1 pageRTV-X900 Specsoneof38583No ratings yet
- Linear Motion Technology-Screw DriveDocument50 pagesLinear Motion Technology-Screw DriveHossein GhazinezhadNo ratings yet
- Geneva Wheel (Major Project)Document6 pagesGeneva Wheel (Major Project)Sushant SainiNo ratings yet
- Types of GearsDocument5 pagesTypes of GearsKarthikNo ratings yet
- Geneva MechanismDocument11 pagesGeneva Mechanismtarun100% (1)
- Final Project ReportDocument25 pagesFinal Project Reportmech mech1No ratings yet
- CH 08Document77 pagesCH 08abdallah ghannamNo ratings yet
- ProductOverview 2023 EN-73Document1 pageProductOverview 2023 EN-73Ismail AliNo ratings yet
- Jetline Capabilities CatalogueDocument4 pagesJetline Capabilities CatalogueJuan RodriguezNo ratings yet
- Mechanical Drives 1 Lap 6Document73 pagesMechanical Drives 1 Lap 6j.bbarnes100% (1)
- Gear BoxesDocument6 pagesGear BoxesGuru ChaudhariNo ratings yet
- Automobile: Steering Mechanisms (Ficm 207)Document6 pagesAutomobile: Steering Mechanisms (Ficm 207)Nikhil DhimanNo ratings yet
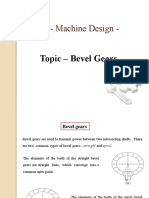
- Subject - Machine Design - : Topic - Bevel GearsDocument12 pagesSubject - Machine Design - : Topic - Bevel GearsRohit GhulanavarNo ratings yet
- Type of GearsDocument6 pagesType of Gearskamalezwan100% (1)
- Gears TypesDocument1 pageGears Typesmustafa taiforNo ratings yet
- Bevel Gear PraveenDocument23 pagesBevel Gear Praveen18WJ1A03F4 Shashank reddyNo ratings yet
- Design of Helical GearDocument58 pagesDesign of Helical Gearkyaji rautNo ratings yet
- Mecanism Pinion Cremaliera (Rack and Pinion)Document56 pagesMecanism Pinion Cremaliera (Rack and Pinion)GheorgheRazvanMarianNo ratings yet
- 07 Konik Helisel Disli Tip Reduktorlu Motorlar KatalogDocument226 pages07 Konik Helisel Disli Tip Reduktorlu Motorlar Katalogrobson2015No ratings yet
- Epicyclic Gear Train - Diagram, Parts, Working, Advantages, Disadvantages - 1626376441568Document9 pagesEpicyclic Gear Train - Diagram, Parts, Working, Advantages, Disadvantages - 1626376441568Arnold ChafewaNo ratings yet
- Gear ClassificationDocument13 pagesGear Classificationprkphani1984100% (1)
- Document 2 TDe9 12082018Document8 pagesDocument 2 TDe9 12082018RoshanNo ratings yet
- GAMBAR MESIN 5 MhsDocument40 pagesGAMBAR MESIN 5 Mhsoboy racunNo ratings yet
- Chapter 2-Gear SystemDocument26 pagesChapter 2-Gear SystemNui Yuhu KuwNo ratings yet
- More Space For Your Ideas: Rotative MovementDocument2 pagesMore Space For Your Ideas: Rotative MovementBhavesh ShiyaniNo ratings yet
- Problems On Epicyclical Gear TrainDocument69 pagesProblems On Epicyclical Gear TrainpadisudeepNo ratings yet
- Shaft Coupling Bolt Torque Pattern - Google SearchDocument1 pageShaft Coupling Bolt Torque Pattern - Google SearchEd OdomNo ratings yet
- Types of Bearings and Their Applications Functions in The IndustryDocument1 pageTypes of Bearings and Their Applications Functions in The IndustryNitin KumarNo ratings yet
- Chapter 02-Robot ComponentsDocument42 pagesChapter 02-Robot ComponentsHuỳnh SơnNo ratings yet
- Bosch - MiniaturaDocument24 pagesBosch - MiniaturaRubens PetrisNo ratings yet
- KinematicsDocument8 pagesKinematicsMuhammed MuhsinNo ratings yet
- Week 11 - Dynamic Motion Simulation - Lecture Presentation PDFDocument40 pagesWeek 11 - Dynamic Motion Simulation - Lecture Presentation PDFMinh Hai LuuNo ratings yet
- Gear Hobbing - Parts, Working, Diagram, Advantages, DisadvantagesDocument1 pageGear Hobbing - Parts, Working, Diagram, Advantages, DisadvantagesDhruv SutharNo ratings yet
- Adaptive Headlight System: ISSN (ONLINE) : 2250-0758, ISSN (PRINT) : 2394-6962Document3 pagesAdaptive Headlight System: ISSN (ONLINE) : 2250-0758, ISSN (PRINT) : 2394-6962AsishNo ratings yet
- RX Detailed SpecificationsDocument3 pagesRX Detailed SpecificationsChris MalloneeNo ratings yet
- ICF BogieDocument89 pagesICF Bogiekr_abhijeet72356587100% (8)
- Brakes and ClutchesDocument145 pagesBrakes and ClutchesDarrel HindoyNo ratings yet
- GEARS Types and UsesDocument9 pagesGEARS Types and UsesAllia TuboroNo ratings yet
- ME202 Lec08Document22 pagesME202 Lec08Deepansh KhatriNo ratings yet
- 2016 - 1404 - Types of Gears - BearingsDocument78 pages2016 - 1404 - Types of Gears - Bearingspranay kaduNo ratings yet
- Bevel GearDocument13 pagesBevel GearADII 2701No ratings yet
- GearsDocument10 pagesGearstanmoy04No ratings yet
- Assignment 2 Industrial Automation With NotesDocument41 pagesAssignment 2 Industrial Automation With NotesSUMIT MALUSARENo ratings yet
- Pivy GraphicsDocument136 pagesPivy GraphicsoundhakarNo ratings yet
- Algorithmic Graph Theory - David Joyner, Minh Van Nguyen, Nathann CohenDocument319 pagesAlgorithmic Graph Theory - David Joyner, Minh Van Nguyen, Nathann CohenJohnatan NaranjoNo ratings yet
- Design Examples of FIR Filters Using The Window MethodDocument21 pagesDesign Examples of FIR Filters Using The Window MethodKanza FatimaNo ratings yet
- Chapter 3 PowerpointDocument56 pagesChapter 3 PowerpointLindseyNo ratings yet
- Mathematics - The Music of Reason, Dieudonné PDFDocument292 pagesMathematics - The Music of Reason, Dieudonné PDFValencia Johan100% (1)
- GRE Center Cash Cow Quiz Question DatabaseDocument360 pagesGRE Center Cash Cow Quiz Question Databaseশাজারাতুল ইসলাম রাসেল100% (1)
- Free Download An Introduction To Management Science Quantitative Approach 15Th Edition David R Anderson Dennis J Sweeney Thomas A Williams Jeffrey D Camm James J Cochran Full Chapter PDFDocument52 pagesFree Download An Introduction To Management Science Quantitative Approach 15Th Edition David R Anderson Dennis J Sweeney Thomas A Williams Jeffrey D Camm James J Cochran Full Chapter PDFthomas.thurber398100% (17)
- 08 Chapter 2Document29 pages08 Chapter 2Jason LimNo ratings yet
- A New Method Based On Machine Learning To Forecast Fruit Yield Using Spectrometric Data: Analysis in A Fruit Supply Chain ContextDocument27 pagesA New Method Based On Machine Learning To Forecast Fruit Yield Using Spectrometric Data: Analysis in A Fruit Supply Chain ContextJavier GómezNo ratings yet
- Mathematics Stage 3 Sample Paper 1Document14 pagesMathematics Stage 3 Sample Paper 1es.chakrovorty100% (2)
- QUARTER: 2/ SEMESTER: First (Week 1-3) :: Concept Notes With Formative ActivitiesDocument15 pagesQUARTER: 2/ SEMESTER: First (Week 1-3) :: Concept Notes With Formative ActivitiesMonica SolomonNo ratings yet
- Me FirmDocument124 pagesMe Firmrf_1238No ratings yet
- Mid Term ArticlesDocument1 pageMid Term ArticlesRajat GulatiNo ratings yet
- Edr Designguidelines Hvac Simulation 2edDocument64 pagesEdr Designguidelines Hvac Simulation 2edDavid O. AlmeidaNo ratings yet
- Robust Motion Control of Oscillatory-Base ManipullatorsDocument153 pagesRobust Motion Control of Oscillatory-Base ManipullatorsRubén de los Santos ReyesNo ratings yet
- Calculating The RMS Energy of The FFT PDFDocument17 pagesCalculating The RMS Energy of The FFT PDFJim Bohni100% (1)
- M HurdleDocument41 pagesM Hurdlequaidian06No ratings yet
- Analysis GF, Algorithms: DesignDocument3 pagesAnalysis GF, Algorithms: Designpankaja_ssu3506No ratings yet
- Euramet PDFDocument23 pagesEuramet PDFIgor GrujićNo ratings yet
- UNIT1 Lesson 6 and 7list - Set - Tuple - Dictionaries - Type ConversionDocument32 pagesUNIT1 Lesson 6 and 7list - Set - Tuple - Dictionaries - Type ConversionSAURABH KUMARNo ratings yet
- [Download pdf] Structural Information And Communication Complexity 25Th International Colloquium Sirocco 2018 Maale Hahamisha Israel June 18 21 2018 Revised Selected Papers Zvi Lotker online ebook all chapter pdfDocument53 pages[Download pdf] Structural Information And Communication Complexity 25Th International Colloquium Sirocco 2018 Maale Hahamisha Israel June 18 21 2018 Revised Selected Papers Zvi Lotker online ebook all chapter pdfrudy.brown928100% (12)
- 7 - Monte-Carlo-Simulation With XL STAT - English GuidelineDocument8 pages7 - Monte-Carlo-Simulation With XL STAT - English GuidelineGauravShelkeNo ratings yet
- Important Thumb Rules Used in Construction by Civil EngineersDocument5 pagesImportant Thumb Rules Used in Construction by Civil Engineersramesh_hinukaleNo ratings yet
- ANSI and ISO Geometric Tolerancing Symbols1Document5 pagesANSI and ISO Geometric Tolerancing Symbols1Mahender KumarNo ratings yet
- Chapter 2 Intellectual RevolutionsDocument41 pagesChapter 2 Intellectual RevolutionsMelody DacanayNo ratings yet
- Shift RegistersDocument8 pagesShift RegistersJohn Arman ArcayaNo ratings yet
- NBKHHDocument41 pagesNBKHHSneha SruthiNo ratings yet
- Log BBADocument7 pagesLog BBASourav RoyNo ratings yet
- 3d Numerical Analysis of Bearing Capacity of Square Foundations On Geogrid Reinforced SoilDocument9 pages3d Numerical Analysis of Bearing Capacity of Square Foundations On Geogrid Reinforced SoilAmin MojiriNo ratings yet















































































![[Download pdf] Structural Information And Communication Complexity 25Th International Colloquium Sirocco 2018 Maale Hahamisha Israel June 18 21 2018 Revised Selected Papers Zvi Lotker online ebook all chapter pdf](https://imgv2-1-f.scribdassets.com/img/document/733399252/149x198/dd5863fae5/1721117909?v=1)







