
Abstract For Digitization of Swing Check Valve
Abstract For Digitization of Swing Check Valve
You might also like
- IntelliVue Information Center HL7 Programmer S Guide PDFDocument210 pagesIntelliVue Information Center HL7 Programmer S Guide PDFhugutuxNo ratings yet
- Boeing 737-300 Transit CheckDocument6 pagesBoeing 737-300 Transit CheckUmer JavedNo ratings yet
- 8 DipmeterDocument175 pages8 DipmeterStart BackNo ratings yet
- MWD Sonny ClassDocument52 pagesMWD Sonny ClassZULFAKHRIBINZAKARIA100% (1)
- Weatherford School: Alexandria University Student Chapter of The AapgDocument16 pagesWeatherford School: Alexandria University Student Chapter of The AapgSaif UL-deen ALmusawiNo ratings yet
- Oilfield Operations & Mud LoggingDocument16 pagesOilfield Operations & Mud Loggingshanujanuuu000No ratings yet
- 2.venturimeter Theory PDFDocument9 pages2.venturimeter Theory PDFSWETHANo ratings yet
- CHE241 - Lab Report Solteq Flow Over Wei PDFDocument22 pagesCHE241 - Lab Report Solteq Flow Over Wei PDFHaziq Haikal100% (1)
- Manual 2Document11 pagesManual 2Tambu GoodnessNo ratings yet
- Drilling Data SensorsDocument12 pagesDrilling Data Sensorsxiaohafu2000No ratings yet
- Flow MeasurementsDocument42 pagesFlow Measurements22-04639No ratings yet
- In Real Time Via Pressure Pulses in The Well's Mud Fluid ColumnDocument5 pagesIn Real Time Via Pressure Pulses in The Well's Mud Fluid ColumnAlexandra BitarNo ratings yet
- Geophysical Log InterpretationDocument4 pagesGeophysical Log InterpretationmakoussamaNo ratings yet
- W181 Preparation For The Wellsite DataDocument11 pagesW181 Preparation For The Wellsite Dataokeke ekeneNo ratings yet
- Fluid Mechanics-I Lab (MEEN 2217)Document8 pagesFluid Mechanics-I Lab (MEEN 2217)waqarNo ratings yet
- SVR 100 Faq enDocument5 pagesSVR 100 Faq enPredrag VojtNo ratings yet
- Venturimeter, Orificemeter & Rotameter Calibration Set-Up: Experiment No. 4Document9 pagesVenturimeter, Orificemeter & Rotameter Calibration Set-Up: Experiment No. 4Somya MaheshwariNo ratings yet
- An Indicating Tachometer For Oceanographic Use: Ocean EngngDocument3 pagesAn Indicating Tachometer For Oceanographic Use: Ocean EngngSusilo Adi PutraNo ratings yet
- Dhananjaya: UNIT-5 Advances in Well Logging Dip Meter ToolDocument16 pagesDhananjaya: UNIT-5 Advances in Well Logging Dip Meter ToolPaul AjithNo ratings yet
- Flow Meter MeasurementDocument12 pagesFlow Meter Measurementrahman75% (8)
- Venturi LabDocument11 pagesVenturi LabKate MorrisNo ratings yet
- Introduction To FlowmetersDocument4 pagesIntroduction To Flowmeterstenneti CHALAPATHY RAONo ratings yet
- Flow Meter Slection GuideDocument8 pagesFlow Meter Slection GuidesushantNo ratings yet
- Measurement While Drilling - WikipediaDocument40 pagesMeasurement While Drilling - WikipediaOnyekwere OwebeNo ratings yet
- Notes Grit RemovalDocument16 pagesNotes Grit RemovalrojanmathewNo ratings yet
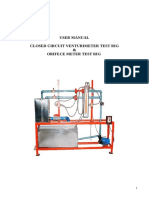
- User Manual Closed Circuit Venturimeter Test Rig & Orifece Meter Test RigDocument7 pagesUser Manual Closed Circuit Venturimeter Test Rig & Orifece Meter Test Rigrohit kumarNo ratings yet
- Lab ManualDocument11 pagesLab ManualSujith SurapaneniNo ratings yet
- Rotameter For Flow Measurement in Laboratory Based Experimental SetupDocument16 pagesRotameter For Flow Measurement in Laboratory Based Experimental SetupMuhammad FahadNo ratings yet
- Performance Test of A Hydraulic Turbine Mid Term 2Document8 pagesPerformance Test of A Hydraulic Turbine Mid Term 2jethro ganeloNo ratings yet
- ME356 MM Lab Manual - SampleDocument17 pagesME356 MM Lab Manual - SampleRohit KumarNo ratings yet
- Lec Two SensorsDocument37 pagesLec Two SensorsBasma EltanekhyNo ratings yet
- Environmental Engineering LabDocument36 pagesEnvironmental Engineering Labsaurav rajNo ratings yet
- 3.0 Cone Penetration TestingDocument19 pages3.0 Cone Penetration TestingdurbakulaNo ratings yet
- Flow Meter Demonstration Lab ReportDocument25 pagesFlow Meter Demonstration Lab ReportNor Elina Ahmad100% (1)
- OrificeDocument7 pagesOrificePrasillaPrisiNo ratings yet
- RotameterDocument6 pagesRotameterPremkumar HNNo ratings yet
- The Study of Laminar and Turbulent FlowDocument10 pagesThe Study of Laminar and Turbulent FlowAdner RomeroNo ratings yet
- Basic Flow MeasurementDocument50 pagesBasic Flow Measurementsuman_94103No ratings yet
- 10 Slope InstrumentationDocument28 pages10 Slope InstrumentationramamurthiNo ratings yet
- Methods and EstimationDocument31 pagesMethods and EstimationPrinceRanaNo ratings yet
- ME 309 Experimental Analysis Orifice, Venturi and Rotameter Calibration For Flow Rate MeasurementDocument5 pagesME 309 Experimental Analysis Orifice, Venturi and Rotameter Calibration For Flow Rate MeasurementAneesh Reddy VallapuNo ratings yet
- Well Logging+ CaliperDocument11 pagesWell Logging+ Caliperginozky100% (1)
- Lecture 11 - Stream Gauging - Part 2Document45 pagesLecture 11 - Stream Gauging - Part 2A RNo ratings yet
- Flow MeasurementsDocument30 pagesFlow MeasurementsGaganNo ratings yet
- Stream Flow LabDocument8 pagesStream Flow LabIrfan SyafriNo ratings yet
- Determining Fluid Velocity LabDocument19 pagesDetermining Fluid Velocity Labtk_atiqah100% (2)
- Btech4th-CE-Hydraulics & Hydraulic Machine LabDocument26 pagesBtech4th-CE-Hydraulics & Hydraulic Machine LabSri E.Maheswar Reddy Assistant ProfessorNo ratings yet
- Production Logging Tools, Principles, Limitations and ApplicationsDocument14 pagesProduction Logging Tools, Principles, Limitations and ApplicationsAP04 MAHI YTNo ratings yet
- Flow MeasurementDocument43 pagesFlow Measurementh.alipooriraniNo ratings yet
- Flow Measurement in Closed ConduitDocument65 pagesFlow Measurement in Closed ConduitjohnmayardNo ratings yet
- Prediction of Standpipe Pressure Ver 1Document6 pagesPrediction of Standpipe Pressure Ver 1Dipankar ChowdhuryNo ratings yet
- Rotameter ExperimentDocument5 pagesRotameter ExperimentMeet Mac Patel100% (1)
- 6 Orifice MeterDocument2 pages6 Orifice MeterMickey S LNo ratings yet
- Flow Measurement TechnologyDocument59 pagesFlow Measurement TechnologyIamPedroNo ratings yet
- Measuring Devices Frequently Used in Mechanical EngineeringDocument7 pagesMeasuring Devices Frequently Used in Mechanical Engineeringpugal4No ratings yet
- LogsDocument46 pagesLogsGopu ThalikunnathNo ratings yet
- Navigation & Voyage Planning Companions: Navigation, Nautical Calculation & Passage Planning CompanionsFrom EverandNavigation & Voyage Planning Companions: Navigation, Nautical Calculation & Passage Planning CompanionsNo ratings yet
- Enhanced Oil Recovery: Resonance Macro- and Micro-Mechanics of Petroleum ReservoirsFrom EverandEnhanced Oil Recovery: Resonance Macro- and Micro-Mechanics of Petroleum ReservoirsRating: 5 out of 5 stars5/5 (1)
- Sewage Disposal Works: Their Design and ConstructionFrom EverandSewage Disposal Works: Their Design and ConstructionNo ratings yet
- Water Remote Sensing: Advancements in Computer Vision Techniques for Water Remote SensingFrom EverandWater Remote Sensing: Advancements in Computer Vision Techniques for Water Remote SensingNo ratings yet
- Account Summary: Consolidated StatementDocument7 pagesAccount Summary: Consolidated StatementSrinivasan RamachandranNo ratings yet
- Ricky C. Alfon: - Individual Differences - (Prof Ed 6) Facilitating Learner-Centered TeachingDocument8 pagesRicky C. Alfon: - Individual Differences - (Prof Ed 6) Facilitating Learner-Centered TeachingMark Joseph DacubaNo ratings yet
- Secure QR Code System: Raed M. Bani-Hani Yarub A. Wahsheh Mohammad B. Al-SarhanDocument6 pagesSecure QR Code System: Raed M. Bani-Hani Yarub A. Wahsheh Mohammad B. Al-SarhanAnonymous HeroNo ratings yet
- NKK Handbook For ISM AuditsDocument29 pagesNKK Handbook For ISM Auditsbill baileyNo ratings yet
- Spe 199993 MSDocument28 pagesSpe 199993 MSHussam AgabNo ratings yet
- User Flow DiagramDocument1 pageUser Flow DiagramjimNo ratings yet
- Articulo-Watson Crick PDFDocument2 pagesArticulo-Watson Crick PDFAjedrez ItineranteNo ratings yet
- Documented Essay by Binyameen FinalDocument6 pagesDocumented Essay by Binyameen FinalMalik YameenNo ratings yet
- FC GundlachDocument17 pagesFC GundlachRodrigo PeixotoNo ratings yet
- 2021 Nqesh Mock Test Set BDocument36 pages2021 Nqesh Mock Test Set Brandolf traigo100% (3)
- Subaru - CHASSISDocument520 pagesSubaru - CHASSISIS52100% (1)
- Rex International Holding Limited Preliminary Offer DocumentDocument723 pagesRex International Holding Limited Preliminary Offer DocumentInvest StockNo ratings yet
- Kalimat Simple Present Tense Aktif Kalimat Simple Past Tense AktifDocument2 pagesKalimat Simple Present Tense Aktif Kalimat Simple Past Tense AktifRestu PamujiNo ratings yet
- Lab ManualDocument14 pagesLab Manualhak creationNo ratings yet
- Keysight U1251B and U1252B Handheld Digital Multimeter: User's and Service GuideDocument177 pagesKeysight U1251B and U1252B Handheld Digital Multimeter: User's and Service GuideAndi MulyanaNo ratings yet
- Cayuga Comm. College - New Employees AnnouncedDocument2 pagesCayuga Comm. College - New Employees AnnouncederikvsorensenNo ratings yet
- Problem SetDocument12 pagesProblem SetJohn Lade Tan NacionalNo ratings yet
- Bigmart Sales Solution MethodologyDocument5 pagesBigmart Sales Solution MethodologyArnab DeyNo ratings yet
- Lab Report 2 PhysiologyDocument9 pagesLab Report 2 PhysiologyTharashi HeshaniNo ratings yet
- SPWLA Log IntegrationDocument14 pagesSPWLA Log IntegrationpahlawankemalemanNo ratings yet
- CURVESDocument30 pagesCURVESPHULARAM PEGUNo ratings yet
- Introductory Entomology: Third Semester Lamjung CampusDocument206 pagesIntroductory Entomology: Third Semester Lamjung Campusnishan khatriNo ratings yet
- AP 5902 Liability Supporting NotesDocument6 pagesAP 5902 Liability Supporting NotesMeojh Imissu100% (1)
- Japanese Suite: Gustav HolstDocument55 pagesJapanese Suite: Gustav HolstLaTonya Hutchison 101No ratings yet
- CASO 2 - Guia EstudianteDocument5 pagesCASO 2 - Guia EstudianteMishe MontenegroNo ratings yet
- General Characteristics of Fungi. Details AbcdefDocument9 pagesGeneral Characteristics of Fungi. Details Abcdefabdul hadiNo ratings yet
- Create Request For QuotationDocument18 pagesCreate Request For QuotationAdauto PolizeliNo ratings yet
- Sepharial - The Science of Foreknowledge Cd13 Id 1928069166 Size603Document114 pagesSepharial - The Science of Foreknowledge Cd13 Id 1928069166 Size603makarandmone100% (9)






















































































Download as pdf or txt
You might also like
- IntelliVue Information Center HL7 Programmer S Guide PDFDocument210 pagesIntelliVue Information Center HL7 Programmer S Guide PDFhugutuxNo ratings yet
- Boeing 737-300 Transit CheckDocument6 pagesBoeing 737-300 Transit CheckUmer JavedNo ratings yet
- 8 DipmeterDocument175 pages8 DipmeterStart BackNo ratings yet
- MWD Sonny ClassDocument52 pagesMWD Sonny ClassZULFAKHRIBINZAKARIA100% (1)
- Weatherford School: Alexandria University Student Chapter of The AapgDocument16 pagesWeatherford School: Alexandria University Student Chapter of The AapgSaif UL-deen ALmusawiNo ratings yet
- Oilfield Operations & Mud LoggingDocument16 pagesOilfield Operations & Mud Loggingshanujanuuu000No ratings yet
- 2.venturimeter Theory PDFDocument9 pages2.venturimeter Theory PDFSWETHANo ratings yet
- CHE241 - Lab Report Solteq Flow Over Wei PDFDocument22 pagesCHE241 - Lab Report Solteq Flow Over Wei PDFHaziq Haikal100% (1)
- Manual 2Document11 pagesManual 2Tambu GoodnessNo ratings yet
- Drilling Data SensorsDocument12 pagesDrilling Data Sensorsxiaohafu2000No ratings yet
- Flow MeasurementsDocument42 pagesFlow Measurements22-04639No ratings yet
- In Real Time Via Pressure Pulses in The Well's Mud Fluid ColumnDocument5 pagesIn Real Time Via Pressure Pulses in The Well's Mud Fluid ColumnAlexandra BitarNo ratings yet
- Geophysical Log InterpretationDocument4 pagesGeophysical Log InterpretationmakoussamaNo ratings yet
- W181 Preparation For The Wellsite DataDocument11 pagesW181 Preparation For The Wellsite Dataokeke ekeneNo ratings yet
- Fluid Mechanics-I Lab (MEEN 2217)Document8 pagesFluid Mechanics-I Lab (MEEN 2217)waqarNo ratings yet
- SVR 100 Faq enDocument5 pagesSVR 100 Faq enPredrag VojtNo ratings yet
- Venturimeter, Orificemeter & Rotameter Calibration Set-Up: Experiment No. 4Document9 pagesVenturimeter, Orificemeter & Rotameter Calibration Set-Up: Experiment No. 4Somya MaheshwariNo ratings yet
- An Indicating Tachometer For Oceanographic Use: Ocean EngngDocument3 pagesAn Indicating Tachometer For Oceanographic Use: Ocean EngngSusilo Adi PutraNo ratings yet
- Dhananjaya: UNIT-5 Advances in Well Logging Dip Meter ToolDocument16 pagesDhananjaya: UNIT-5 Advances in Well Logging Dip Meter ToolPaul AjithNo ratings yet
- Flow Meter MeasurementDocument12 pagesFlow Meter Measurementrahman75% (8)
- Venturi LabDocument11 pagesVenturi LabKate MorrisNo ratings yet
- Introduction To FlowmetersDocument4 pagesIntroduction To Flowmeterstenneti CHALAPATHY RAONo ratings yet
- Flow Meter Slection GuideDocument8 pagesFlow Meter Slection GuidesushantNo ratings yet
- Measurement While Drilling - WikipediaDocument40 pagesMeasurement While Drilling - WikipediaOnyekwere OwebeNo ratings yet
- Notes Grit RemovalDocument16 pagesNotes Grit RemovalrojanmathewNo ratings yet
- User Manual Closed Circuit Venturimeter Test Rig & Orifece Meter Test RigDocument7 pagesUser Manual Closed Circuit Venturimeter Test Rig & Orifece Meter Test Rigrohit kumarNo ratings yet
- Lab ManualDocument11 pagesLab ManualSujith SurapaneniNo ratings yet
- Rotameter For Flow Measurement in Laboratory Based Experimental SetupDocument16 pagesRotameter For Flow Measurement in Laboratory Based Experimental SetupMuhammad FahadNo ratings yet
- Performance Test of A Hydraulic Turbine Mid Term 2Document8 pagesPerformance Test of A Hydraulic Turbine Mid Term 2jethro ganeloNo ratings yet
- ME356 MM Lab Manual - SampleDocument17 pagesME356 MM Lab Manual - SampleRohit KumarNo ratings yet
- Lec Two SensorsDocument37 pagesLec Two SensorsBasma EltanekhyNo ratings yet
- Environmental Engineering LabDocument36 pagesEnvironmental Engineering Labsaurav rajNo ratings yet
- 3.0 Cone Penetration TestingDocument19 pages3.0 Cone Penetration TestingdurbakulaNo ratings yet
- Flow Meter Demonstration Lab ReportDocument25 pagesFlow Meter Demonstration Lab ReportNor Elina Ahmad100% (1)
- OrificeDocument7 pagesOrificePrasillaPrisiNo ratings yet
- RotameterDocument6 pagesRotameterPremkumar HNNo ratings yet
- The Study of Laminar and Turbulent FlowDocument10 pagesThe Study of Laminar and Turbulent FlowAdner RomeroNo ratings yet
- Basic Flow MeasurementDocument50 pagesBasic Flow Measurementsuman_94103No ratings yet
- 10 Slope InstrumentationDocument28 pages10 Slope InstrumentationramamurthiNo ratings yet
- Methods and EstimationDocument31 pagesMethods and EstimationPrinceRanaNo ratings yet
- ME 309 Experimental Analysis Orifice, Venturi and Rotameter Calibration For Flow Rate MeasurementDocument5 pagesME 309 Experimental Analysis Orifice, Venturi and Rotameter Calibration For Flow Rate MeasurementAneesh Reddy VallapuNo ratings yet
- Well Logging+ CaliperDocument11 pagesWell Logging+ Caliperginozky100% (1)
- Lecture 11 - Stream Gauging - Part 2Document45 pagesLecture 11 - Stream Gauging - Part 2A RNo ratings yet
- Flow MeasurementsDocument30 pagesFlow MeasurementsGaganNo ratings yet
- Stream Flow LabDocument8 pagesStream Flow LabIrfan SyafriNo ratings yet
- Determining Fluid Velocity LabDocument19 pagesDetermining Fluid Velocity Labtk_atiqah100% (2)
- Btech4th-CE-Hydraulics & Hydraulic Machine LabDocument26 pagesBtech4th-CE-Hydraulics & Hydraulic Machine LabSri E.Maheswar Reddy Assistant ProfessorNo ratings yet
- Production Logging Tools, Principles, Limitations and ApplicationsDocument14 pagesProduction Logging Tools, Principles, Limitations and ApplicationsAP04 MAHI YTNo ratings yet
- Flow MeasurementDocument43 pagesFlow Measurementh.alipooriraniNo ratings yet
- Flow Measurement in Closed ConduitDocument65 pagesFlow Measurement in Closed ConduitjohnmayardNo ratings yet
- Prediction of Standpipe Pressure Ver 1Document6 pagesPrediction of Standpipe Pressure Ver 1Dipankar ChowdhuryNo ratings yet
- Rotameter ExperimentDocument5 pagesRotameter ExperimentMeet Mac Patel100% (1)
- 6 Orifice MeterDocument2 pages6 Orifice MeterMickey S LNo ratings yet
- Flow Measurement TechnologyDocument59 pagesFlow Measurement TechnologyIamPedroNo ratings yet
- Measuring Devices Frequently Used in Mechanical EngineeringDocument7 pagesMeasuring Devices Frequently Used in Mechanical Engineeringpugal4No ratings yet
- LogsDocument46 pagesLogsGopu ThalikunnathNo ratings yet
- Navigation & Voyage Planning Companions: Navigation, Nautical Calculation & Passage Planning CompanionsFrom EverandNavigation & Voyage Planning Companions: Navigation, Nautical Calculation & Passage Planning CompanionsNo ratings yet
- Enhanced Oil Recovery: Resonance Macro- and Micro-Mechanics of Petroleum ReservoirsFrom EverandEnhanced Oil Recovery: Resonance Macro- and Micro-Mechanics of Petroleum ReservoirsRating: 5 out of 5 stars5/5 (1)
- Sewage Disposal Works: Their Design and ConstructionFrom EverandSewage Disposal Works: Their Design and ConstructionNo ratings yet
- Water Remote Sensing: Advancements in Computer Vision Techniques for Water Remote SensingFrom EverandWater Remote Sensing: Advancements in Computer Vision Techniques for Water Remote SensingNo ratings yet
- Account Summary: Consolidated StatementDocument7 pagesAccount Summary: Consolidated StatementSrinivasan RamachandranNo ratings yet
- Ricky C. Alfon: - Individual Differences - (Prof Ed 6) Facilitating Learner-Centered TeachingDocument8 pagesRicky C. Alfon: - Individual Differences - (Prof Ed 6) Facilitating Learner-Centered TeachingMark Joseph DacubaNo ratings yet
- Secure QR Code System: Raed M. Bani-Hani Yarub A. Wahsheh Mohammad B. Al-SarhanDocument6 pagesSecure QR Code System: Raed M. Bani-Hani Yarub A. Wahsheh Mohammad B. Al-SarhanAnonymous HeroNo ratings yet
- NKK Handbook For ISM AuditsDocument29 pagesNKK Handbook For ISM Auditsbill baileyNo ratings yet
- Spe 199993 MSDocument28 pagesSpe 199993 MSHussam AgabNo ratings yet
- User Flow DiagramDocument1 pageUser Flow DiagramjimNo ratings yet
- Articulo-Watson Crick PDFDocument2 pagesArticulo-Watson Crick PDFAjedrez ItineranteNo ratings yet
- Documented Essay by Binyameen FinalDocument6 pagesDocumented Essay by Binyameen FinalMalik YameenNo ratings yet
- FC GundlachDocument17 pagesFC GundlachRodrigo PeixotoNo ratings yet
- 2021 Nqesh Mock Test Set BDocument36 pages2021 Nqesh Mock Test Set Brandolf traigo100% (3)
- Subaru - CHASSISDocument520 pagesSubaru - CHASSISIS52100% (1)
- Rex International Holding Limited Preliminary Offer DocumentDocument723 pagesRex International Holding Limited Preliminary Offer DocumentInvest StockNo ratings yet
- Kalimat Simple Present Tense Aktif Kalimat Simple Past Tense AktifDocument2 pagesKalimat Simple Present Tense Aktif Kalimat Simple Past Tense AktifRestu PamujiNo ratings yet
- Lab ManualDocument14 pagesLab Manualhak creationNo ratings yet
- Keysight U1251B and U1252B Handheld Digital Multimeter: User's and Service GuideDocument177 pagesKeysight U1251B and U1252B Handheld Digital Multimeter: User's and Service GuideAndi MulyanaNo ratings yet
- Cayuga Comm. College - New Employees AnnouncedDocument2 pagesCayuga Comm. College - New Employees AnnouncederikvsorensenNo ratings yet
- Problem SetDocument12 pagesProblem SetJohn Lade Tan NacionalNo ratings yet
- Bigmart Sales Solution MethodologyDocument5 pagesBigmart Sales Solution MethodologyArnab DeyNo ratings yet
- Lab Report 2 PhysiologyDocument9 pagesLab Report 2 PhysiologyTharashi HeshaniNo ratings yet
- SPWLA Log IntegrationDocument14 pagesSPWLA Log IntegrationpahlawankemalemanNo ratings yet
- CURVESDocument30 pagesCURVESPHULARAM PEGUNo ratings yet
- Introductory Entomology: Third Semester Lamjung CampusDocument206 pagesIntroductory Entomology: Third Semester Lamjung Campusnishan khatriNo ratings yet
- AP 5902 Liability Supporting NotesDocument6 pagesAP 5902 Liability Supporting NotesMeojh Imissu100% (1)
- Japanese Suite: Gustav HolstDocument55 pagesJapanese Suite: Gustav HolstLaTonya Hutchison 101No ratings yet
- CASO 2 - Guia EstudianteDocument5 pagesCASO 2 - Guia EstudianteMishe MontenegroNo ratings yet
- General Characteristics of Fungi. Details AbcdefDocument9 pagesGeneral Characteristics of Fungi. Details Abcdefabdul hadiNo ratings yet
- Create Request For QuotationDocument18 pagesCreate Request For QuotationAdauto PolizeliNo ratings yet
- Sepharial - The Science of Foreknowledge Cd13 Id 1928069166 Size603Document114 pagesSepharial - The Science of Foreknowledge Cd13 Id 1928069166 Size603makarandmone100% (9)