Download as docx, pdf, or txt
You might also like
- Development of Smart Blind StickDocument7 pagesDevelopment of Smart Blind StickxpeprisheyNo ratings yet
- Samsung Lcd-Monitor 941mp, 741mp Ch. Ls19doa, Ls17doaDocument91 pagesSamsung Lcd-Monitor 941mp, 741mp Ch. Ls19doa, Ls17doakernchiaNo ratings yet
- 745 PDFDocument104 pages745 PDFPeraNo ratings yet
- Synopsis 1Document7 pagesSynopsis 1ashu yadavNo ratings yet
- PBL Project ReportDocument7 pagesPBL Project ReportAhmed HassanNo ratings yet
- Project Review On Ultrasonic Distance Measurement: Prakhar Shrivastava, Praveen Kumar, Ankit TiwariDocument3 pagesProject Review On Ultrasonic Distance Measurement: Prakhar Shrivastava, Praveen Kumar, Ankit TiwarirajatpreetNo ratings yet
- Panja Mini ProjectDocument3 pagesPanja Mini ProjectLil KidNo ratings yet
- Final Notes For Ultrasonic SensorDocument13 pagesFinal Notes For Ultrasonic SensorLiado JiuNo ratings yet
- Sri Indu Institute of Engineering and TechnologyDocument21 pagesSri Indu Institute of Engineering and TechnologyMallikarjunNo ratings yet
- Automobile Prototype SensorsDocument5 pagesAutomobile Prototype SensorsIJSTENo ratings yet
- Auto-Smart Obstacle DetectionDocument5 pagesAuto-Smart Obstacle DetectionIJSTENo ratings yet
- Project Report On Obstacle Avoiding RobotDocument13 pagesProject Report On Obstacle Avoiding Robotarunraj SuresNo ratings yet
- Wall Following Robot Obstacle Avoiding RobotDocument9 pagesWall Following Robot Obstacle Avoiding RobotMuhammad FaisalNo ratings yet
- Report Mini ProjectDocument16 pagesReport Mini ProjectAbhilash Chandran JNo ratings yet
- Reverse Parking Sensor: IarjsetDocument3 pagesReverse Parking Sensor: Iarjsetعمل الخيرNo ratings yet
- Paper 26Document5 pagesPaper 26vivekgorasiya32No ratings yet
- Assistive Infrared Sensor Based Smart Stick For Blind PeopleDocument6 pagesAssistive Infrared Sensor Based Smart Stick For Blind PeopleجعفرالشموسيNo ratings yet
- Design and Development of Microcontroller Based Ultrasonic Flaw DetectorDocument7 pagesDesign and Development of Microcontroller Based Ultrasonic Flaw DetectorBagusElokNo ratings yet
- Report 151220202107Document11 pagesReport 151220202107barisozksmn06No ratings yet
- Distance Measurement Using Ultrasonic Sensor and ArduinoDocument4 pagesDistance Measurement Using Ultrasonic Sensor and ArduinoAR LAPNo ratings yet
- Collision Detection & Warning System Based On AVR Platform PresentationDocument17 pagesCollision Detection & Warning System Based On AVR Platform PresentationIrfan DanishNo ratings yet
- Software Design of Ultrasonic Ranging System in Agricultural RobotDocument4 pagesSoftware Design of Ultrasonic Ranging System in Agricultural RobotIOSRJEN : hard copy, certificates, Call for Papers 2013, publishing of journalNo ratings yet
- Exp. No.: 4 Date: Arduino Based Ultrasonic Distance Sensor AIMDocument8 pagesExp. No.: 4 Date: Arduino Based Ultrasonic Distance Sensor AIMYenigalla Kireeti SaiNo ratings yet
- Sensors Distance Measurement Using ArduinoDocument6 pagesSensors Distance Measurement Using Arduinonikna100% (2)
- Institute of Technology and Management: Department of Telecommunication EngineeringDocument7 pagesInstitute of Technology and Management: Department of Telecommunication EngineeringRohit JoshiNo ratings yet
- ANDRAWDocument6 pagesANDRAWOdoch HerbertNo ratings yet
- Distance Measuring With ULTRASONIC SENSOR WITH AURDINO ReportDocument10 pagesDistance Measuring With ULTRASONIC SENSOR WITH AURDINO ReportHassan AliNo ratings yet
- 2 - No Parking AlertDocument6 pages2 - No Parking Alertعمل الخيرNo ratings yet
- Stick Blind ManDocument4 pagesStick Blind ManجعفرالشموسيNo ratings yet
- Distance Measurement Using Ultrasonic Sensor and ArduinoDocument10 pagesDistance Measurement Using Ultrasonic Sensor and Arduinotejender singhNo ratings yet
- MB Sir ProjectDocument21 pagesMB Sir ProjectakshayNo ratings yet
- Microprocesser Iot ChipDocument11 pagesMicroprocesser Iot Chipsfhjxdgh83No ratings yet
- Obstacle Avoiding Smartcar Using Arduino PDFDocument21 pagesObstacle Avoiding Smartcar Using Arduino PDFJesvin tjNo ratings yet
- PBL Project ProposalDocument4 pagesPBL Project ProposalAhmed HassanNo ratings yet
- 6 II February 2018Document6 pages6 II February 2018oyukiisaacNo ratings yet
- Radar Detection Using Ultrasonic Sensor: June 2020Document6 pagesRadar Detection Using Ultrasonic Sensor: June 2020yuqqi qiNo ratings yet
- Final ReportDocument8 pagesFinal ReportAkrit YadavNo ratings yet
- Distance Measurement Using Ultrasonic Sensor and ArduinoDocument2 pagesDistance Measurement Using Ultrasonic Sensor and ArduinoAwais Zulfiqar75% (4)
- Ultrasonic Sensor Based Smart Cap As EleDocument5 pagesUltrasonic Sensor Based Smart Cap As ElerahuNo ratings yet
- IOT Exp-2Document22 pagesIOT Exp-2Download PurposeNo ratings yet
- Working With Ultrasonic Sensor Using Arduino BoardDocument6 pagesWorking With Ultrasonic Sensor Using Arduino BoardDaniel Evans100% (2)
- A Mechatronics Case Study ReportDocument11 pagesA Mechatronics Case Study ReportA run ima RudraNo ratings yet
- Ultrasonic SensorDocument6 pagesUltrasonic SensorJane100% (1)
- Research Paper-1Document5 pagesResearch Paper-1aryan7321dNo ratings yet
- CHNDDocument22 pagesCHNDchandhuNo ratings yet
- Traffic Data Vertical of Geospatial Data CenterDocument4 pagesTraffic Data Vertical of Geospatial Data CenterVIVA-TECH IJRINo ratings yet
- Cheap Parking Assist System Using 8051 Family: November 2016Document5 pagesCheap Parking Assist System Using 8051 Family: November 2016Alwan 20No ratings yet
- Solar CultivatorDocument41 pagesSolar CultivatorAnonymous ytZsBOVNo ratings yet
- Obstacle Avoiding Robot Using Arduino: AbstractDocument5 pagesObstacle Avoiding Robot Using Arduino: AbstractWarna KlasikNo ratings yet
- Exp-4 HISIDocument8 pagesExp-4 HISIShivpriya.Gupta Btech2022No ratings yet
- ENGG5024-1985 Electronic Systems Mini ProjectDocument8 pagesENGG5024-1985 Electronic Systems Mini ProjectAlfred LiNo ratings yet
- Mini ProjectDocument14 pagesMini Projecttefflon trolegdyNo ratings yet
- SM873Document12 pagesSM873Petar BajsićNo ratings yet
- Title HC SR04 Ultrasonic Distance Sensor Using ArduinoDocument4 pagesTitle HC SR04 Ultrasonic Distance Sensor Using Arduinodragh meh downNo ratings yet
- Capstone Project 2 FinalDocument35 pagesCapstone Project 2 FinalAmarjeet SinghNo ratings yet
- Ijsrp p3807Document4 pagesIjsrp p3807ekyNo ratings yet
- Implementation of Model Radar For Target Identification Using Remote Station Alert SystemDocument8 pagesImplementation of Model Radar For Target Identification Using Remote Station Alert SystemIJRASETPublicationsNo ratings yet
- Radar ReportDocument16 pagesRadar ReportMANJOSH Roy 18No ratings yet
- EF03085-HC-SR04 Ultrasonic Module User GuideDocument6 pagesEF03085-HC-SR04 Ultrasonic Module User GuideSreejith Skr100% (1)
- A Project Report On Ultrasonic RANGE FINDER Using Micrcontroller ATmel 89C2051Document56 pagesA Project Report On Ultrasonic RANGE FINDER Using Micrcontroller ATmel 89C2051Nishit Chittora47% (15)
- Microwave and Millimeter Wave Circuits and Systems: Emerging Design, Technologies and ApplicationsFrom EverandMicrowave and Millimeter Wave Circuits and Systems: Emerging Design, Technologies and ApplicationsNo ratings yet
- Software Radio: Sampling Rate Selection, Design and SynchronizationFrom EverandSoftware Radio: Sampling Rate Selection, Design and SynchronizationNo ratings yet
- International Standard: High-Voltage Test Techniques - Definitions and Requirements For On-Site TestingDocument11 pagesInternational Standard: High-Voltage Test Techniques - Definitions and Requirements For On-Site Testinglenon chidzivaNo ratings yet
- Esp32-S2 Datasheet enDocument49 pagesEsp32-S2 Datasheet enRenato FerreiraNo ratings yet
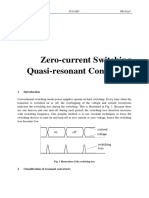
- ZCS NoteDocument20 pagesZCS NoteMohammad AbabnehNo ratings yet
- 5.111 Principles of Chemical Science: Mit OpencoursewareDocument6 pages5.111 Principles of Chemical Science: Mit OpencoursewaresarjitgaurNo ratings yet
- Technical Requirement and Guaranteee Schedule For 33/0.415 KV, 3 Phase 100 Kva Station TransformerDocument1 pageTechnical Requirement and Guaranteee Schedule For 33/0.415 KV, 3 Phase 100 Kva Station TransformerShahriar AhmedNo ratings yet
- ASHRAE - HVAC Noise and Vibration ControlDocument93 pagesASHRAE - HVAC Noise and Vibration Controlmnt6176100% (3)
- Radio Electronics December 1992Document100 pagesRadio Electronics December 1992Benjamin Dover100% (3)
- 13329-1 Bottom PDFDocument1 page13329-1 Bottom PDFIkhsan AmirudinNo ratings yet
- Optoelectronic Devices and Systems: Second EditionDocument11 pagesOptoelectronic Devices and Systems: Second EditionDEVINo ratings yet
- Definitive - Technology - Owners - Manual - bp7002-6Document13 pagesDefinitive - Technology - Owners - Manual - bp7002-6JoeNo ratings yet
- Error Codes E-FLY M25Document1 pageError Codes E-FLY M25pavlik1No ratings yet
- Fromm fv205 Orbital Wrapping MachineDocument2 pagesFromm fv205 Orbital Wrapping Machinemahmoud zregatNo ratings yet
- Panasonic HIT 240S Data Sheet-1Document2 pagesPanasonic HIT 240S Data Sheet-1Jesus David Muñoz RoblesNo ratings yet
- Semiconductor Diodes Notes FermarfajardoDocument6 pagesSemiconductor Diodes Notes Fermarfajardokuro AishiroNo ratings yet
- LC3631 6281 85Document76 pagesLC3631 6281 85bakyenikoNo ratings yet
- Compaq Presario CQ45 SchematicsDocument48 pagesCompaq Presario CQ45 Schematicsmeng798651No ratings yet
- 04 Schematic DiagramDocument48 pages04 Schematic Diagramkovan1No ratings yet
- Planificare Anuală AN SCOLAR 2019-2020 Semestrul I: ObservatiiDocument3 pagesPlanificare Anuală AN SCOLAR 2019-2020 Semestrul I: ObservatiiandreeaNo ratings yet
- Overview of Electrical Systems in Thermal Power Plant and Electrical System DesignDocument24 pagesOverview of Electrical Systems in Thermal Power Plant and Electrical System DesignAnshul TayalNo ratings yet
- Esquema Elec DanfossDocument1 pageEsquema Elec Danfossjose girotNo ratings yet
- Registers and CountersDocument47 pagesRegisters and Counterssheela lNo ratings yet
- Bill Cash CodeDocument36 pagesBill Cash CodeEdicson Rincon RamirezNo ratings yet
- UltraSonic Cleaners - CatalogDocument3 pagesUltraSonic Cleaners - Catalogdéborah_rosalesNo ratings yet
- 325 Lab 11 ReportDocument5 pages325 Lab 11 Reportapi-241454978No ratings yet
- Separadoe MagneticoDocument4 pagesSeparadoe MagneticowilsonNo ratings yet
- Iecep Compilation EsatDocument10 pagesIecep Compilation Esatjanno2101No ratings yet
- 1817LLDocument63 pages1817LLMadhvi NemaNo ratings yet
- MVH-330DAB Quickstart Manual 1270750036200 MVH-130DABpdf Quick Start Guide NL en FR de It EsDocument2 pagesMVH-330DAB Quickstart Manual 1270750036200 MVH-130DABpdf Quick Start Guide NL en FR de It EsmartnikfotoNo ratings yet