Download as pdf or txt
You might also like
- Austin Cars From 1932Document103 pagesAustin Cars From 1932Chris ThorleyNo ratings yet
- Principles of Econometrics 4th Edition Hill Solutions ManualDocument34 pagesPrinciples of Econometrics 4th Edition Hill Solutions Manualcourtneyriceacnmbxqiky100% (13)
- Bulk Material Handling: Practical Guidance for Mechanical EngineersFrom EverandBulk Material Handling: Practical Guidance for Mechanical EngineersRating: 5 out of 5 stars5/5 (1)
- Mine Ventilation Using CFDDocument5 pagesMine Ventilation Using CFDmitevNo ratings yet
- Case Study On Ford MotorsDocument8 pagesCase Study On Ford Motorsabhishek_awasthi_150% (2)
- Optimum Ramp Design in Open Pit MinesDocument9 pagesOptimum Ramp Design in Open Pit MinesFrancys CcoriNo ratings yet
- Access Layout Optimisation For Underground MinesDocument11 pagesAccess Layout Optimisation For Underground MinesWalter Cesar Loli MoralesNo ratings yet
- Decline Design in Underground Mines Using Constrained Path OptimisationDocument8 pagesDecline Design in Underground Mines Using Constrained Path OptimisationJhan HuayraNo ratings yet
- Measuring Dynamic Effects On Underpasses of High-Speed Railway LinesDocument16 pagesMeasuring Dynamic Effects On Underpasses of High-Speed Railway LinesAltomarNo ratings yet
- Paper 2Document4 pagesPaper 2Jonathan Alvis CjuroNo ratings yet
- Productivity of Tunnel Construction Using Road-Headers: ArticleDocument11 pagesProductivity of Tunnel Construction Using Road-Headers: ArticleRajaSekhararayudu SanaNo ratings yet
- Cost Analysis of Material Handling Systems in Open Pit MiningDocument19 pagesCost Analysis of Material Handling Systems in Open Pit MiningNikola SimicNo ratings yet
- Optimisation Tools in Underground Mine DesignDocument20 pagesOptimisation Tools in Underground Mine DesignDaniel SantanaNo ratings yet
- Relating Volume Loss and Greenfield S - 2019 - Tunnelling and Underground SpaceDocument8 pagesRelating Volume Loss and Greenfield S - 2019 - Tunnelling and Underground Spacezimbazimba75No ratings yet
- Rock Mechanics Phase - IDocument16 pagesRock Mechanics Phase - IDatalytics GlobalNo ratings yet
- (1-9) Roadway Culverts-Revisd - Copyedited-FormatDocument9 pages(1-9) Roadway Culverts-Revisd - Copyedited-FormatChandini Suman SahooNo ratings yet
- Dynamic Phase-Mining Optimization in Open-Pit Metal MinesDocument7 pagesDynamic Phase-Mining Optimization in Open-Pit Metal MinesSelamet ErçelebiNo ratings yet
- Equipment Selection For Surface MiningDocument25 pagesEquipment Selection For Surface MiningYSAGIANNo ratings yet
- 3D Modelling For Mechanized Tunnelling in Soft Ground-Influence of The Constitutive ModelDocument13 pages3D Modelling For Mechanized Tunnelling in Soft Ground-Influence of The Constitutive ModelDidaBouchNo ratings yet
- 6 Articulo - Cost Analysis of Material Handling Systems in Open Pit Mining Case Study On An Iron Ore Prefeasibility StudyDocument42 pages6 Articulo - Cost Analysis of Material Handling Systems in Open Pit Mining Case Study On An Iron Ore Prefeasibility StudyCristian Santivañez Milla100% (1)
- Daller Constr Method Ita LjubljanaDocument8 pagesDaller Constr Method Ita LjubljanaVIJAY SAI SANKURATHRINo ratings yet
- Development of SCL in UKDocument6 pagesDevelopment of SCL in UKRajesh SinghNo ratings yet
- Publication 23 OMSLAG+MATERIEDocument7 pagesPublication 23 OMSLAG+MATERIEDinny Kus AndianyNo ratings yet
- Jelvez Etal A New Model For Automated Pushback SelectionDocument9 pagesJelvez Etal A New Model For Automated Pushback SelectionJhon Antony Gamboa SandovalNo ratings yet
- 2718-Article Text-11433-1-10-20180903Document10 pages2718-Article Text-11433-1-10-20180903KebedeNo ratings yet
- Open Cast Mine PlanningDocument21 pagesOpen Cast Mine PlanningMadhu GovindanNo ratings yet
- Le VernArticle ATC AnglaisDocument19 pagesLe VernArticle ATC AnglaisMilenka Uceda PuiconNo ratings yet
- Network Optimization For The Design of Underground Mines: M. Brazil and D. A. ThomasDocument11 pagesNetwork Optimization For The Design of Underground Mines: M. Brazil and D. A. ThomasSiyi LiNo ratings yet
- 10 1080@0305215X 2019 1678150Document17 pages10 1080@0305215X 2019 1678150Morteza ParichehNo ratings yet
- Estimation of Rock Load Height During deDocument11 pagesEstimation of Rock Load Height During dePawan Kumar PradhanNo ratings yet
- JMA APS FinalDocument24 pagesJMA APS FinalSoporte CGeoMinNo ratings yet
- Determination of The Optimum Crown Pillar Thickness Between OpenDocument8 pagesDetermination of The Optimum Crown Pillar Thickness Between OpenluisparedesNo ratings yet
- Proceding TeDocument7 pagesProceding TeAnonymous cncdtlNNo ratings yet
- Optimizing The Open Pit-To-underground Mining TransitionDocument13 pagesOptimizing The Open Pit-To-underground Mining TransitionChan QuangNo ratings yet
- Minerals: Open Pit Optimization Using The Floating Cone Method: A New AlgorithmDocument20 pagesMinerals: Open Pit Optimization Using The Floating Cone Method: A New AlgorithmCARLOS FABRIZIO MONTOYA VEGANo ratings yet
- Optimum Design of Pile Foundations: January 2008Document11 pagesOptimum Design of Pile Foundations: January 2008dhan singhNo ratings yet
- Unveiling Patterns in The Interaction Between Risers and SeabedDocument10 pagesUnveiling Patterns in The Interaction Between Risers and SeabedEdgar MicoloNo ratings yet
- Resource Requirements ForDocument14 pagesResource Requirements ForKevin Alexandro Ocampo RosilloNo ratings yet
- Closing The Gap Towards Super-Long Suspension Bridges Using Computational MorphogenesisDocument7 pagesClosing The Gap Towards Super-Long Suspension Bridges Using Computational MorphogenesisNicholas FeatherstonNo ratings yet
- Dynamic Response of Exible Pavement Submitted by Impulsive LoadingDocument11 pagesDynamic Response of Exible Pavement Submitted by Impulsive LoadingGuy MouakoNo ratings yet
- Optimisation Method in Shield Tunnel Construction: Bai YunDocument8 pagesOptimisation Method in Shield Tunnel Construction: Bai YunHarold TaylorNo ratings yet
- 1437 British PortsAss Port and Heavy Duty Pavement Design ManualDocument11 pages1437 British PortsAss Port and Heavy Duty Pavement Design Manualjars1999No ratings yet
- PavementDocument11 pagesPavementelcivilengNo ratings yet
- An Another Way For Open Pit Mine Design OptimizatiDocument11 pagesAn Another Way For Open Pit Mine Design OptimizatiAli SalehiNo ratings yet
- An Update On In-Pit Crushing-Conveying-Stacking Systems in Surface Metal MinesDocument11 pagesAn Update On In-Pit Crushing-Conveying-Stacking Systems in Surface Metal MinesRobert Knight0% (1)
- SPE-188138-MS Application of Geomechanics and Hybrid Metaheuristics in Designing An Optimized Well PathDocument19 pagesSPE-188138-MS Application of Geomechanics and Hybrid Metaheuristics in Designing An Optimized Well PathehsanNo ratings yet
- Analysis of A Bridge Failure Due To Fire Using Computational Fluid Dynamics and Finite Element ModelsDocument15 pagesAnalysis of A Bridge Failure Due To Fire Using Computational Fluid Dynamics and Finite Element ModelsItuknowNo ratings yet
- Surface Mine Development (Hartman)Document7 pagesSurface Mine Development (Hartman)maringanlamhot100% (1)
- MNP - APCOM2017!!! RampaDocument8 pagesMNP - APCOM2017!!! RampaSoporte CGeoMinNo ratings yet
- In-Pit Crushing and Conveying (IPCC) - A Tried and Tested Alternative To TrucksDocument8 pagesIn-Pit Crushing and Conveying (IPCC) - A Tried and Tested Alternative To TrucksbamigdimNo ratings yet
- Structural Design of Block Pavements For PortsDocument9 pagesStructural Design of Block Pavements For PortsDavid ReyesNo ratings yet
- ISCSM 2018 KapageridisI - Etal.Document17 pagesISCSM 2018 KapageridisI - Etal.Sondang BerlianNo ratings yet
- Buna Bak Muhakkak Asphalt Kıyas3Document18 pagesBuna Bak Muhakkak Asphalt Kıyas3Mücahit AtalanNo ratings yet
- Dynamic Modelling of Bridge Approach Slabs Under Moving LoadsDocument7 pagesDynamic Modelling of Bridge Approach Slabs Under Moving LoadsBasrawi ManNo ratings yet
- Tunnel Blast Design Using Artificial Neural Network A Case Study Dsyndr 20110603064345d PDFDocument7 pagesTunnel Blast Design Using Artificial Neural Network A Case Study Dsyndr 20110603064345d PDFferpasierraNo ratings yet
- EJFRSpatial Variability 2006Document15 pagesEJFRSpatial Variability 2006Soraph DiscoveriesNo ratings yet
- Use of Finite Element Method in Optimization of Quay Crane's GrabDocument6 pagesUse of Finite Element Method in Optimization of Quay Crane's GrabCarlos CarvNo ratings yet
- Motor Truck Logging Methods Engineering Experiment Station Series, Bulletin No. 12From EverandMotor Truck Logging Methods Engineering Experiment Station Series, Bulletin No. 12No ratings yet
- A Practical Course in Wooden Boat and Ship BuildingFrom EverandA Practical Course in Wooden Boat and Ship BuildingRating: 4 out of 5 stars4/5 (1)
- Geohazards and Pipelines: State-of-the-Art Design Using Experimental, Numerical and Analytical MethodologiesFrom EverandGeohazards and Pipelines: State-of-the-Art Design Using Experimental, Numerical and Analytical MethodologiesNo ratings yet
- Timeline Dan Rencana Kerja PT SCEDocument1 pageTimeline Dan Rencana Kerja PT SCEAndre AlistinNo ratings yet
- Buku Rekening Halaman DepanDocument1 pageBuku Rekening Halaman DepanAndre AlistinNo ratings yet
- Buku Rekening KeseluruhanDocument5 pagesBuku Rekening KeseluruhanAndre AlistinNo ratings yet
- Education: Education: Diploma Quantity Surveyor Gpa / Ipk: 3,97 TOEFEL Score: 680Document1 pageEducation: Education: Diploma Quantity Surveyor Gpa / Ipk: 3,97 TOEFEL Score: 680Andre AlistinNo ratings yet
- Slope Stability Analysis1Document26 pagesSlope Stability Analysis1Andre AlistinNo ratings yet
- Drawing by Approved By: Pit Design ParametersDocument1 pageDrawing by Approved By: Pit Design ParametersAndre AlistinNo ratings yet
- Desain Pit Tambang Air Laya Barat Untuk Memenuhi Target Produksi Tahun 2018 Pt. Bukit Asam (Persero) TBK Sumatera SelatanDocument14 pagesDesain Pit Tambang Air Laya Barat Untuk Memenuhi Target Produksi Tahun 2018 Pt. Bukit Asam (Persero) TBK Sumatera SelatanAndre AlistinNo ratings yet
- Geofisika TambangDocument1 pageGeofisika TambangAndre AlistinNo ratings yet
- Manuale Tecnico-Iconadeco EngDocument28 pagesManuale Tecnico-Iconadeco EngjoaoNo ratings yet
- Made By:-Shrish Ojha and Aryaman Singh MarjaraDocument34 pagesMade By:-Shrish Ojha and Aryaman Singh MarjaraSanskriti JoshiNo ratings yet
- Tools Earl LowDocument22 pagesTools Earl Lowjaimecam85No ratings yet
- Research ArticleDocument9 pagesResearch ArticleElla Gita SilvianaNo ratings yet
- BX-Y08 User ManualDocument57 pagesBX-Y08 User Manualghatevinod9360No ratings yet
- DIY Smart Phone Microscope Biology Performance TaskDocument3 pagesDIY Smart Phone Microscope Biology Performance TaskArvie QuijanoNo ratings yet
- Apspdcl HT BillDocument2 pagesApspdcl HT BilltallurikesavadasNo ratings yet
- Method Statement FOR Waste Polymer Slurry Disposal: PT Bauer Pratama IndonesiaDocument4 pagesMethod Statement FOR Waste Polymer Slurry Disposal: PT Bauer Pratama IndonesiaFendi Rang TigorNo ratings yet
- Adopted Nymtc Ffy 2020-2024 TipDocument349 pagesAdopted Nymtc Ffy 2020-2024 TipShu YUNo ratings yet
- The Restoration of Degraded Lands by Local Communities and Indigenous Peoples.Document8 pagesThe Restoration of Degraded Lands by Local Communities and Indigenous Peoples.Nadia SantiniNo ratings yet
- Study Guide STH Edition: Clinical LaboratoryDocument30 pagesStudy Guide STH Edition: Clinical LaboratoryMendoza, Richelle A.No ratings yet
- Application of Quadratic Functions GroupDocument8 pagesApplication of Quadratic Functions GroupMalik IbrahimNo ratings yet
- Lecture 3-2Document9 pagesLecture 3-2Juan LupetNo ratings yet
- HVAC FundamentalDocument192 pagesHVAC FundamentalMyo Kyaw Kyaw100% (1)
- Design and Implementation of Automatic Aquarium System Using IOTDocument3 pagesDesign and Implementation of Automatic Aquarium System Using IOTJayshree ShindeNo ratings yet
- RMP v065 p0413Document93 pagesRMP v065 p0413buddy72No ratings yet
- Moeller df51 Manual PDFDocument241 pagesMoeller df51 Manual PDFpraetorianbl0% (2)
- Finallist 2012Document147 pagesFinallist 2012tracker1234No ratings yet
- RRL DamsDocument7 pagesRRL DamsJamesNo ratings yet
- BS en 13480-8-2012Document42 pagesBS en 13480-8-2012A.A0% (1)
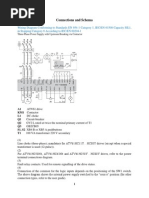
- Connections and SchemaDocument7 pagesConnections and SchemaKukuh WidodoNo ratings yet
- Admisie Aer-En 2013Document8 pagesAdmisie Aer-En 2013ionut2007No ratings yet
- 31 Questions To Define A CultureDocument2 pages31 Questions To Define A Cultureexoduschj9858No ratings yet
- The 4 Types of Innovation and The Problems They Solve - Satell, 2007Document7 pagesThe 4 Types of Innovation and The Problems They Solve - Satell, 2007FabioDeOliveiraVasquesNo ratings yet
- 8257 DMA Controller:: To Fetch The Instruction To Decode The Instruction and To Execute The InstructionDocument25 pages8257 DMA Controller:: To Fetch The Instruction To Decode The Instruction and To Execute The Instructionsatyanarayana12No ratings yet
- BP Vs BTH Eff: BTE BP Diesel B10 B20 B30Document6 pagesBP Vs BTH Eff: BTE BP Diesel B10 B20 B30Babu JonnalagaddaNo ratings yet