Download as pdf or txt
You might also like
- Service Manual UVENT-T Ver1.4 ENGDocument36 pagesService Manual UVENT-T Ver1.4 ENGMarco Antonio Aruquipa Quispe100% (1)
- How To Control Stepper Motor With A4988 Driver and ArduinoDocument4 pagesHow To Control Stepper Motor With A4988 Driver and ArduinoAnonymous e3XZzQNo ratings yet
- PDF Created With Pdffactory Trial VersionDocument16 pagesPDF Created With Pdffactory Trial VersionRubenNo ratings yet
- How To Control Stepper Motor With A4988 Driver and ArduinoDocument4 pagesHow To Control Stepper Motor With A4988 Driver and ArduinoAnonymous e3XZzQNo ratings yet
- Spare Parts List: Hydraulic BreakersDocument24 pagesSpare Parts List: Hydraulic BreakersJean Morales100% (2)
- Bildr Use The Easydriver Stepper Motor Driver..Document5 pagesBildr Use The Easydriver Stepper Motor Driver..fayazrashNo ratings yet
- Lecture 18Document7 pagesLecture 18Azam KhanNo ratings yet
- Afmotor Library ReferenceDocument8 pagesAfmotor Library ReferenceDanilo MochiuteNo ratings yet
- EV3 Motor GuidefdDocument6 pagesEV3 Motor GuidefdBob LobbyNo ratings yet
- SteppermotorDocument7 pagesSteppermotorFALAK FATIMANo ratings yet
- Documentation Pull LineDocument6 pagesDocumentation Pull Linejacerosiete2952No ratings yet
- Lab Report G 15-1Document12 pagesLab Report G 15-1Suleiman Abubakar AuduNo ratings yet
- Motor StepperDocument4 pagesMotor Stepperfavour ukpai100% (1)
- CPEN 100 Laboratory No. 4Document8 pagesCPEN 100 Laboratory No. 4Jiever AustriaNo ratings yet
- Stepper Motor TutorialDocument6 pagesStepper Motor TutorialengrodeNo ratings yet
- LAB Report 10Document14 pagesLAB Report 10razakhan5114No ratings yet
- Step 1: Specification, Motor DriverDocument8 pagesStep 1: Specification, Motor DriverAfriNo ratings yet
- Controlling Stepper Motor Via Arduino UnoDocument15 pagesControlling Stepper Motor Via Arduino UnoZahran TarekNo ratings yet
- 03 Circuit Schematics An4988Document3 pages03 Circuit Schematics An4988Adam Mamani100% (1)
- BASIC Stamp I Application Notes: 6: A Serial Stepper ControllerDocument4 pagesBASIC Stamp I Application Notes: 6: A Serial Stepper ControllerNguyễn HiểnNo ratings yet
- Arduino - MotorKnobDocument5 pagesArduino - MotorKnobOmar KhayyamNo ratings yet
- StepperDocument2 pagesStepperعادل هيكلNo ratings yet
- Voice Controlled Robotic VehicleDocument22 pagesVoice Controlled Robotic Vehiclemustafa shabanNo ratings yet
- Arduino Bipolar Stepper Motor Control - Imple ProjectsDocument9 pagesArduino Bipolar Stepper Motor Control - Imple ProjectsSssNo ratings yet
- How To Control Speed of Stepper Motor by PotentiometerDocument5 pagesHow To Control Speed of Stepper Motor by PotentiometerMihai Bogdan100% (1)
- TB6600 Stepper Motor Driver TutorialDocument3 pagesTB6600 Stepper Motor Driver TutorialPéter BegidsánNo ratings yet
- Eeeb371 Pic Exp6newDocument7 pagesEeeb371 Pic Exp6newSalemAbaad100% (2)
- Proyecto de Mini Dron - Desarrollo Propio de Tecnologia - Sin ArduinoDocument22 pagesProyecto de Mini Dron - Desarrollo Propio de Tecnologia - Sin ArduinoHumberto AnguloNo ratings yet
- Connect Motor Controller Pins To Arduino Digital PinsDocument5 pagesConnect Motor Controller Pins To Arduino Digital PinsMuhammadAkbarAsis100% (1)
- Stepper Motor Interfacing With Microcontroller TutorialDocument15 pagesStepper Motor Interfacing With Microcontroller TutorialChakkaravarthiEr100% (1)
- Image Processing of Sidescan SonarDocument7 pagesImage Processing of Sidescan SonarAlex NicksonNo ratings yet
- Connect Motor Controller Pins To Arduino Digital PinsDocument5 pagesConnect Motor Controller Pins To Arduino Digital PinsMuhammadAkbarAsisNo ratings yet
- Servo MotorDocument37 pagesServo MotorKartik DaveNo ratings yet
- Lab 6 ReportDocument27 pagesLab 6 ReportIzzat AzmanNo ratings yet
- Stepper MotorDocument9 pagesStepper MotorHasan Mahmood100% (1)
- Guia Motor EsDocument26 pagesGuia Motor EsrenatocuevasanchezNo ratings yet
- StepperBee ManualDocument22 pagesStepperBee ManualGianniFisaNo ratings yet
- Interfacing Stepper Motor To 8086 Using 8255Document6 pagesInterfacing Stepper Motor To 8086 Using 8255berhe2121100% (1)
- Intelligent Stepper Motor Driver With DRV8824Document22 pagesIntelligent Stepper Motor Driver With DRV8824RintheGreatNo ratings yet
- Stepper Motor: Free !Document2 pagesStepper Motor: Free !carlos augusto do carmo braia100% (1)
- Airpax Stepper MotorDocument8 pagesAirpax Stepper MotorTiago GalloNo ratings yet
- Inverter Varispeed F7A (KAE-S616-55F)Document98 pagesInverter Varispeed F7A (KAE-S616-55F)Miguel LinaresNo ratings yet
- Driver Shields L293DDocument5 pagesDriver Shields L293DChandra NurikoNo ratings yet
- If StepDocument23 pagesIf Stepkrishna_cad28No ratings yet
- Stepper Motor ControlDocument5 pagesStepper Motor ControlKumar R Ranjan86% (7)
- Controlling Stepper Motor: Experiment #4Document9 pagesControlling Stepper Motor: Experiment #4Asaad HalayqaNo ratings yet
- Stepper ArduinoDocument6 pagesStepper ArduinoShahrim MohdNo ratings yet
- C - Tutorial 212 300Document89 pagesC - Tutorial 212 300Christophe DerenneNo ratings yet
- Controlling NEMA 17 Stepper Motor With Arduino and A4988 Stepper Driver ModuleDocument15 pagesControlling NEMA 17 Stepper Motor With Arduino and A4988 Stepper Driver Modulesanjib raiNo ratings yet
- 080544R - Stepper Motor and DriversDocument8 pages080544R - Stepper Motor and DriversAnuruddha WijerathneNo ratings yet
- Stepper Control Using The Accelstepper Library Control Stepper Speed With A PotentiometerDocument2 pagesStepper Control Using The Accelstepper Library Control Stepper Speed With A PotentiometerSalasNo ratings yet
- Tip23 e PDFDocument4 pagesTip23 e PDFThanh BaronNo ratings yet
- DC Motor Bidirectional Speed Control Using PWM PDFDocument5 pagesDC Motor Bidirectional Speed Control Using PWM PDFM Rameez Ur Rehman100% (1)
- Samsung AC Servo System 2009 4Document40 pagesSamsung AC Servo System 2009 4Frank M C100% (1)
- Eastern Mediterranean UniversityDocument24 pagesEastern Mediterranean UniversityMpu KatanaNo ratings yet
- Unit 5Document30 pagesUnit 5kruthikaNo ratings yet
- Bending WiringDocument15 pagesBending WiringBinun KasihnamaNo ratings yet
- GRBL Losing StepsDocument26 pagesGRBL Losing StepsFranciscoNo ratings yet
- Esp-2000 BSDocument6 pagesEsp-2000 BSByron LopezNo ratings yet
- Electrical-Engineering Engineering Microcontroller Interfacing-And-Applications NotesDocument27 pagesElectrical-Engineering Engineering Microcontroller Interfacing-And-Applications NotesUtkarsh Krishn SG21547No ratings yet
- Half StepDocument7 pagesHalf StepMahmud ShaadNo ratings yet
- Control of DC Motor Using Different Control StrategiesFrom EverandControl of DC Motor Using Different Control StrategiesNo ratings yet
- Powermos Transistor Buk101-50Gl Logic Level Topfet: Description Quick Reference DataDocument11 pagesPowermos Transistor Buk101-50Gl Logic Level Topfet: Description Quick Reference DataAnonymous e3XZzQNo ratings yet
- Zvs Llc-Resonant Push-Pull DC-DC Converter: Yogeshkumar M.H Dr. V. SatyanagakumarDocument5 pagesZvs Llc-Resonant Push-Pull DC-DC Converter: Yogeshkumar M.H Dr. V. SatyanagakumarAnonymous e3XZzQNo ratings yet
- Bode Plots: Appendix BDocument3 pagesBode Plots: Appendix BAnonymous e3XZzQNo ratings yet
- 12V DC To 220V AC Inverter CircuitDocument6 pages12V DC To 220V AC Inverter CircuitAnonymous e3XZzQ100% (1)
- Variable Frequency PWM (Pulse Width Modulation) Signal Generation Using Timers of Arduino (Atmega328p Microcontroller) - Arduino Fast PWMDocument5 pagesVariable Frequency PWM (Pulse Width Modulation) Signal Generation Using Timers of Arduino (Atmega328p Microcontroller) - Arduino Fast PWMAnonymous e3XZzQ0% (1)
- TFM AsselZhaksylykDocument101 pagesTFM AsselZhaksylykAnonymous e3XZzQNo ratings yet
- Ucx52Xa Regulating Pulse Width Modulators: 1 Features 3 DescriptionDocument23 pagesUcx52Xa Regulating Pulse Width Modulators: 1 Features 3 DescriptionAnonymous e3XZzQNo ratings yet
- High Frequency Pulse Width Modulator With ResistanDocument6 pagesHigh Frequency Pulse Width Modulator With ResistanAnonymous e3XZzQNo ratings yet
- MOS IRFP150 IRFP240 IRFP250 IRFP254 IRFP260 IRFP350 IRFP360 IRFP450 IRFP460 - IRFP460 IRFP450 - IR VISHAY (Hong Kong Manufacturer) - Diode &Document6 pagesMOS IRFP150 IRFP240 IRFP250 IRFP254 IRFP260 IRFP350 IRFP360 IRFP450 IRFP460 - IRFP460 IRFP450 - IR VISHAY (Hong Kong Manufacturer) - Diode &Anonymous e3XZzQNo ratings yet
- AccelStepper - Class MembersDocument1 pageAccelStepper - Class MembersAnonymous e3XZzQNo ratings yet
- Comparison of DC Push Pull and Modified Tibc For Solar Water Pumping System in Matlab SimulinkDocument4 pagesComparison of DC Push Pull and Modified Tibc For Solar Water Pumping System in Matlab SimulinkAnonymous e3XZzQNo ratings yet
- Aduino Stepper Motor Acceleration and Rotary Encoder Control - Süleyman CananDocument1 pageAduino Stepper Motor Acceleration and Rotary Encoder Control - Süleyman CananAnonymous e3XZzQNo ratings yet
- Dimensions: (A) (B) (C) (D) (E) (F) G H JDocument1 pageDimensions: (A) (B) (C) (D) (E) (F) G H JAnonymous e3XZzQNo ratings yet
- Electric WeldingDocument19 pagesElectric WeldingAnonymous e3XZzQNo ratings yet
- Arc Welding Equipment Selection: "So You're The New Welding Engineer" AWS SeminarDocument39 pagesArc Welding Equipment Selection: "So You're The New Welding Engineer" AWS SeminarAnonymous e3XZzQNo ratings yet
- Interfas CNC Wire Edm 2 SimpleDocument1 pageInterfas CNC Wire Edm 2 SimpleAnonymous e3XZzQNo ratings yet
- Camden 120TX Data SheetDocument2 pagesCamden 120TX Data SheetJMAC SupplyNo ratings yet
- Water-Cooled Refrigerant Recovery and Recycling Units: Operation & MaintenanceDocument54 pagesWater-Cooled Refrigerant Recovery and Recycling Units: Operation & MaintenanceUmar MajeedNo ratings yet
- Mercedes-Benz (Eu) Actros Actros 1835 (4X2) L/LL/S/LS/MLS/LLS (Midi/Lowliner)Document5 pagesMercedes-Benz (Eu) Actros Actros 1835 (4X2) L/LL/S/LS/MLS/LLS (Midi/Lowliner)عبدالغني القباطيNo ratings yet
- Tmsa - Specifications Suggested Division 15 SpecificationsDocument1 pageTmsa - Specifications Suggested Division 15 SpecificationshimajcpNo ratings yet
- Transmission Control Valve (#15001-)Document2 pagesTransmission Control Valve (#15001-)munh100% (2)
- Joints and FittingsDocument19 pagesJoints and FittingsniezajanepatnaNo ratings yet
- A123 Battery CellsDocument9 pagesA123 Battery CellshenryNo ratings yet
- CAT 3500B Generator Electrical SystemDocument4 pagesCAT 3500B Generator Electrical Systemedcoo100% (7)
- Cableado QCDocument341 pagesCableado QCCarlosNo ratings yet
- Fuel Transfer Pump Check c6.6Document10 pagesFuel Transfer Pump Check c6.6Anonymous V9fdC6No ratings yet
- RX 3302DDocument9 pagesRX 3302DAndrewerNo ratings yet
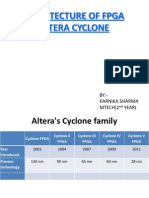
- Architecture of Fpga Altera Cyclone: BY:-Karnika Sharma Mtech (2 Year)Document29 pagesArchitecture of Fpga Altera Cyclone: BY:-Karnika Sharma Mtech (2 Year)karnika143100% (1)
- Catalogue Nxplus C enDocument72 pagesCatalogue Nxplus C enSheik HussainNo ratings yet
- Corentyne Comprehensive High School: Name: Lynacia Daly Grade: 10G Topic: Computer UnitDocument9 pagesCorentyne Comprehensive High School: Name: Lynacia Daly Grade: 10G Topic: Computer UnitZossia TiexeiraNo ratings yet
- Tonepad Dod280compDocument1 pageTonepad Dod280compDiego Obetko100% (1)
- Pxa-H800 Installation ManualDocument21 pagesPxa-H800 Installation ManualPetronilo11No ratings yet
- Clevo P65xRP6 Service ManualDocument134 pagesClevo P65xRP6 Service ManualDayamLauthOliveiraNo ratings yet
- ACKS010Document5 pagesACKS010kallatisNo ratings yet
- Electrical Safe Working SopDocument6 pagesElectrical Safe Working SopaceNo ratings yet
- Towbar Manual 15F-2511Document9 pagesTowbar Manual 15F-2511Leo EnriquezNo ratings yet
- Assignment 2 CodeDocument26 pagesAssignment 2 Codeshivakalyan yadavNo ratings yet
- 385C Cat Vs ZX850H HitachiDocument73 pages385C Cat Vs ZX850H HitachiKolo BenduNo ratings yet
- Lexco PresentationDocument66 pagesLexco PresentationEr Sundeep RachakondaNo ratings yet
- A Pic Real Time Clock Ic RTC Using The ds1307 - Compress PDFDocument6 pagesA Pic Real Time Clock Ic RTC Using The ds1307 - Compress PDFabbas ahmedNo ratings yet
- BN68-05100C-01 Un5000m Asia Eng 180409.1Document36 pagesBN68-05100C-01 Un5000m Asia Eng 180409.1muhammad0umar-4No ratings yet
- SAKO Company&Products IntroductionDocument24 pagesSAKO Company&Products IntroductionHilina MedferNo ratings yet
- Boiler OverhaulDocument9 pagesBoiler OverhaulHemant PatilNo ratings yet
- A New Dual Boost DC/DC Converter With A Voltage Conversion GainDocument6 pagesA New Dual Boost DC/DC Converter With A Voltage Conversion GainNiharika DeshpandeNo ratings yet