Download as pdf or txt
You might also like
- CSS NC II Core 2 Set-Up Computer Networks UpdatedDocument31 pagesCSS NC II Core 2 Set-Up Computer Networks UpdatedEric Manrique Talamisan82% (57)
- Expt 1 Gunn DiodeDocument3 pagesExpt 1 Gunn DiodeSastry KalavakolanuNo ratings yet
- Thesis Report FinalDocument25 pagesThesis Report FinalThanhha Nguyen100% (2)
- ISE Pre ATP Lab Guide CombinedDocument407 pagesISE Pre ATP Lab Guide CombinedMajnu SmNo ratings yet
- CCNA 3 and 4 Companion Guide, 3rd Edition (CNAP)Document9 pagesCCNA 3 and 4 Companion Guide, 3rd Edition (CNAP)api-3826866100% (1)
- PNP TransistorDocument17 pagesPNP TransistorsuhaybNo ratings yet
- SSB ExtentionDocument2 pagesSSB ExtentionHimanshu HaldarNo ratings yet
- Report - Phase ShifterDocument8 pagesReport - Phase ShifterAmeer AliNo ratings yet
- Assignment - 2 Optical CommunicationDocument5 pagesAssignment - 2 Optical CommunicationAsha palNo ratings yet
- Final Vls I Project ReportDocument5 pagesFinal Vls I Project Reportgaurav_amuNo ratings yet
- 6.RC Phase Shift OscillatorDocument4 pages6.RC Phase Shift OscillatorManojkumarNo ratings yet
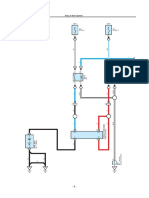
- System Circuit Engine - Hybrid System Stop - Start SystemDocument19 pagesSystem Circuit Engine - Hybrid System Stop - Start SystemEdik Bonifacio MamaniNo ratings yet
- Potentiometers: DefinitionDocument4 pagesPotentiometers: DefinitionjayNo ratings yet
- Diode Resistance & Diode Equivalent CircuitsDocument42 pagesDiode Resistance & Diode Equivalent Circuitsgirishkumardarisi254No ratings yet
- Push Andvpop Instructions in 8051 MicrocontrollerDocument6 pagesPush Andvpop Instructions in 8051 Microcontrolleree210150900103No ratings yet
- SCR ApplicationsDocument26 pagesSCR ApplicationsRodz Gier JrNo ratings yet
- Laboratory 2 OscilloscopeDocument9 pagesLaboratory 2 Oscilloscopenurhafiqah100% (1)
- Electrical Symbols & Electronic SymbolsDocument17 pagesElectrical Symbols & Electronic SymbolsMuhammad SajedNo ratings yet
- Measure of Angular VelocityDocument12 pagesMeasure of Angular VelocityAshley_Rulzzzzzzz100% (2)
- Experiment No - 04 To Study DC MachineDocument4 pagesExperiment No - 04 To Study DC MachineRaviNo ratings yet
- Zero Crossing Detector-Using 741 ICDocument4 pagesZero Crossing Detector-Using 741 ICPritam SirpotdarNo ratings yet
- Digital Communications: Bajibabu MutteDocument24 pagesDigital Communications: Bajibabu MutteBaji BabuNo ratings yet
- Presentation 1Document15 pagesPresentation 1Ajay Talajiya0% (1)
- Electrical Properties of Mos DeviceDocument28 pagesElectrical Properties of Mos Devicemayamohan7250% (1)
- Multistage Transistor AmplifiersDocument8 pagesMultistage Transistor Amplifiersbree789No ratings yet
- Ece 3323 Experiment 1Document11 pagesEce 3323 Experiment 1TANQUERO_WW20% (1)
- Crystal Oscillator Circuit and Its WorkingDocument5 pagesCrystal Oscillator Circuit and Its WorkingJilly ArasuNo ratings yet
- Speed Control of DC Motor by Various MethodsDocument5 pagesSpeed Control of DC Motor by Various MethodsVIVA-TECH IJRINo ratings yet
- Eca Lab ManualDocument78 pagesEca Lab ManualNageswariah.MNo ratings yet
- PPTDocument21 pagesPPTNikunj AgarwalNo ratings yet
- LIC Manual NewDocument84 pagesLIC Manual NewVandhana PramodhanNo ratings yet
- CH 8 AC BridgesDocument21 pagesCH 8 AC BridgesVikasNo ratings yet
- Basic Superheterodyne Block Diagram and FunctionalityDocument4 pagesBasic Superheterodyne Block Diagram and FunctionalityibrahimNo ratings yet
- Comparison TableDocument3 pagesComparison TableRodriguez Villalobos NelsonNo ratings yet
- Experiment No.02 To Observe The Characteristics of A Half Wave RectifierDocument4 pagesExperiment No.02 To Observe The Characteristics of A Half Wave RectifierWaqas MughalNo ratings yet
- Experiment 6 Zener DiodeDocument8 pagesExperiment 6 Zener DiodeAyeshaNo ratings yet
- Unit1-Numerical Based ProblemsDocument11 pagesUnit1-Numerical Based ProblemsWowskinNo ratings yet
- Digital Storage OscilloscopeDocument9 pagesDigital Storage OscilloscopeamrithaNo ratings yet
- D 01Document209 pagesD 01Raj Boda0% (1)
- Applications of Balanced ModulatorDocument5 pagesApplications of Balanced ModulatorSomeshwar GaddalaNo ratings yet
- Power Electronics Important QuestionsDocument4 pagesPower Electronics Important QuestionsShuvamSarkar50% (2)
- Difference Between Photodiode & Phototransistor: Comparison ChartDocument5 pagesDifference Between Photodiode & Phototransistor: Comparison ChartCladyNo ratings yet
- MeseretDocument278 pagesMeseretmeseret sisayNo ratings yet
- Experiment Name-Study of Phase Shift OscillatorDocument2 pagesExperiment Name-Study of Phase Shift Oscillatormrana_56100% (2)
- Dreaming of Seeing Atoms.....Document35 pagesDreaming of Seeing Atoms.....Maaz ZafarNo ratings yet
- Lab 5 Report PDFDocument13 pagesLab 5 Report PDFTamilinbaaNo ratings yet
- BHEL Model Question Paper (Answers Updated) Senthil4u's WeblogDocument81 pagesBHEL Model Question Paper (Answers Updated) Senthil4u's Webloganjanikuma100% (1)
- System Losses in RadarDocument4 pagesSystem Losses in Radargantayat100% (1)
- 8051 CH2Document89 pages8051 CH2Amardeep PotdarNo ratings yet
- Chap4 LED 2jfvjkfkjdjdjkDocument26 pagesChap4 LED 2jfvjkfkjdjdjkBhushan KumarNo ratings yet
- Lecture 4 - Wattmeter & Bridge CircuitsDocument47 pagesLecture 4 - Wattmeter & Bridge CircuitsAbel OmweriNo ratings yet
- Circuit Theory: Unit 3 Resonant CircuitsDocument36 pagesCircuit Theory: Unit 3 Resonant CircuitsSuganthi ShanmugasundarNo ratings yet
- Build A Simple Electronic Mosquito Repeller CircuitDocument3 pagesBuild A Simple Electronic Mosquito Repeller Circuitbhanuka2009100% (1)
- Handling of Sensor Bridge OffsetDocument6 pagesHandling of Sensor Bridge OffsetAsdrubale Mancupacapa ArrivoNo ratings yet
- Analog Circuits II Lab ManualDocument47 pagesAnalog Circuits II Lab ManualParesh SawantNo ratings yet
- Act 17300Document371 pagesAct 17300muhammad abdussalamNo ratings yet
- Basic ElectronicsDocument1 pageBasic Electronicsvishwanath81100% (1)
- PhotodetectorsDocument46 pagesPhotodetectorsShivam AgarwalNo ratings yet
- LM 733Document11 pagesLM 733Bharavi K SNo ratings yet
- Extracted Pages From RADAR SYSTEMS - Unit-4Document17 pagesExtracted Pages From RADAR SYSTEMS - Unit-4ChintuNo ratings yet
- RT-CH 5 - Tracking RadarDocument13 pagesRT-CH 5 - Tracking RadarHemant YadavNo ratings yet
- Unit-4 Tracking RadarDocument58 pagesUnit-4 Tracking RadarMani Prince100% (1)
- Communication System II: SS7 (Protocol)Document55 pagesCommunication System II: SS7 (Protocol)Rao Saif HussainNo ratings yet
- AMAG - multiNODE-2 Installation ManualDocument64 pagesAMAG - multiNODE-2 Installation Manualadela sampayoNo ratings yet
- Class 5 TCP Reliable Data TransportDocument3 pagesClass 5 TCP Reliable Data TransportNurhanNo ratings yet
- EEE 360 Communications Systems I Lecture Presentation 1Document6 pagesEEE 360 Communications Systems I Lecture Presentation 1Edmond NurellariNo ratings yet
- 40G FaqDocument11 pages40G FaqNguyen Hoang AnhNo ratings yet
- Bus Stop Detection Using RFIDDocument19 pagesBus Stop Detection Using RFIDVishnuNo ratings yet
- DSS05 Manage Security ServicesDocument28 pagesDSS05 Manage Security Servicesnyamsuren.mncertNo ratings yet
- Propagation Path Loss Models For 5G Urban Micro-And Macro-Cellular ScenariosDocument6 pagesPropagation Path Loss Models For 5G Urban Micro-And Macro-Cellular ScenariosTommy AsselinNo ratings yet
- If GPS Signal Simulator Development and Verification - 03.20184.LeiDongDocument182 pagesIf GPS Signal Simulator Development and Verification - 03.20184.LeiDongA. VillaNo ratings yet
- IJCRT1813479Document2 pagesIJCRT1813479Rohan J EEE-2019-23No ratings yet
- Product Guide v2Document23 pagesProduct Guide v2api-3709327100% (2)
- GGSN Monitoring First Layer Handling PDFDocument24 pagesGGSN Monitoring First Layer Handling PDFJose D RevueltaNo ratings yet
- Fatos Peci ResumeDocument3 pagesFatos Peci ResumefapeciNo ratings yet
- Ericsson Network Slicing Value PotentialDocument12 pagesEricsson Network Slicing Value Potentialnashafi949No ratings yet
- Excel Based Vendor Registration-1Document4 pagesExcel Based Vendor Registration-1Satya PrakashNo ratings yet
- RGWenceslao Resume Aug2011Document2 pagesRGWenceslao Resume Aug2011Ronald Patrick WenceslaoNo ratings yet
- HICA Datacom 02Document10 pagesHICA Datacom 02Asma ElmangoushNo ratings yet
- DME Lecture NotesDocument20 pagesDME Lecture NotesMuhammad HaziqNo ratings yet
- WSN Unit 2Document27 pagesWSN Unit 2RizwanaNo ratings yet
- CCNA 1 v7.0 Modules 16 - 17: Building and Securing A Small Network Exam Answers 2020Document25 pagesCCNA 1 v7.0 Modules 16 - 17: Building and Securing A Small Network Exam Answers 2020Apolo GreenNo ratings yet
- Data Preparation StepsDocument6 pagesData Preparation StepsJames IshakuNo ratings yet
- FW3010 19.0v1 Configuring SSL Site-To-Site VPNs On Sophos FirewallDocument15 pagesFW3010 19.0v1 Configuring SSL Site-To-Site VPNs On Sophos FirewallAndré MouraNo ratings yet
- G-Tech Manual PBX-printDocument20 pagesG-Tech Manual PBX-printSuwarno SuwarnoNo ratings yet
- Aws Certified Solutions Architect Associate Saa c02 PDFDocument7 pagesAws Certified Solutions Architect Associate Saa c02 PDFPavan Kumar SrestyNo ratings yet
- ParaListForUMTS (3G)Document6,965 pagesParaListForUMTS (3G)Kiko EsguerraNo ratings yet
- Troubleshooting and Maintenace For CS CoreDocument29 pagesTroubleshooting and Maintenace For CS CoreGheePhotobotz100% (1)
- HoTT-SUMD-Spec REV01 12062012 PDFDocument6 pagesHoTT-SUMD-Spec REV01 12062012 PDFslimline33No ratings yet