Download as pdf or txt
You might also like
- Chapter8 SolutionsDocument7 pagesChapter8 SolutionsLan HươngNo ratings yet
- Quantitative Finance Problems and SolutionsDocument2 pagesQuantitative Finance Problems and SolutionsJosiah KhorNo ratings yet
- Timeseries PresentationDocument34 pagesTimeseries PresentationMalavika ChandranNo ratings yet
- Non-Seasonal Box-Jenkins ModelsDocument50 pagesNon-Seasonal Box-Jenkins ModelsCarl AlbNo ratings yet
- Partial Autocorrelations: Timotheus Darikwa SSTA031: Time Series AnalysisDocument26 pagesPartial Autocorrelations: Timotheus Darikwa SSTA031: Time Series AnalysisMaggie Kalembo100% (1)
- Module 1 PDFDocument37 pagesModule 1 PDFSruti SuhasariaNo ratings yet
- Non-Seasonal Box-Jenkins ModelsDocument75 pagesNon-Seasonal Box-Jenkins ModelsCarl AlbNo ratings yet
- Stationary ProcessesDocument20 pagesStationary ProcessesGeneral MasterNo ratings yet
- Module 2 - ARIMA PDFDocument15 pagesModule 2 - ARIMA PDFSruti SuhasariaNo ratings yet
- Arma Models NewDocument66 pagesArma Models NewHIMANSHI HIMANSHINo ratings yet
- Handout Time Series For Sem II 2020 PDFDocument24 pagesHandout Time Series For Sem II 2020 PDFAkanksha DeyNo ratings yet
- Univariate Time Series Models: Gianluca CubaddaDocument75 pagesUnivariate Time Series Models: Gianluca CubaddaAntonio VeronicoNo ratings yet
- Ch6 Slides Ed3 Feb2021Document63 pagesCh6 Slides Ed3 Feb2021Phuc Hong PhamNo ratings yet
- Module 3 PDFDocument39 pagesModule 3 PDFSruti SuhasariaNo ratings yet
- Chapter 2. Time-Series Properties: See Also The Related ExercisesDocument23 pagesChapter 2. Time-Series Properties: See Also The Related ExercisesyuyuNo ratings yet
- Timeseries PresentationDocument34 pagesTimeseries PresentationJms008No ratings yet
- Y .C, YA,: Yt Yy y YsDocument24 pagesY .C, YA,: Yt Yy y YsGeneral MasterNo ratings yet
- ARMA ProcessesDocument29 pagesARMA ProcessesVidaup40No ratings yet
- Scientific Computing: Gopalakrishnan E. ADocument44 pagesScientific Computing: Gopalakrishnan E. AMurthy PolisettyNo ratings yet
- Time Series Lecture Notes-Ch-6Document35 pagesTime Series Lecture Notes-Ch-6yonasante2121No ratings yet
- Stat 520 CH 4 SlidesDocument28 pagesStat 520 CH 4 SlidesrheatrishasantosNo ratings yet
- Time Series-Ch02Document16 pagesTime Series-Ch02Abdul Rehman AzmatNo ratings yet
- Time-Series Note September 2022Document9 pagesTime-Series Note September 2022aayush.5.parasharNo ratings yet
- M475 - c2 - L4 - Z TransformDocument8 pagesM475 - c2 - L4 - Z TransformAli AlmakhmariNo ratings yet
- Chapter 4. ARIMA - SVDocument49 pagesChapter 4. ARIMA - SVthucnhi.2003hnntNo ratings yet
- f13hw2 SolutionsDocument13 pagesf13hw2 SolutionssafaNo ratings yet
- Propaganda MediaDocument42 pagesPropaganda MediaAbdullah ShahNo ratings yet
- Control System Engineering: Prof. Amitkumar B. Panchal, Assistant ProfessorDocument76 pagesControl System Engineering: Prof. Amitkumar B. Panchal, Assistant ProfessorSudhanshu Singh0% (1)
- Chapter 6 SRDocument137 pagesChapter 6 SRMadhusmita BarikNo ratings yet
- 24.3.6 - Variation of Parameters Second OrderDocument11 pages24.3.6 - Variation of Parameters Second Orderanon_422073337No ratings yet
- Stock Watson 3U ExerciseSolutions Chapter16 StudentsDocument6 pagesStock Watson 3U ExerciseSolutions Chapter16 Studentssimao_sabrosa7794No ratings yet
- Control - System - Chapter 6 - 8EDocument51 pagesControl - System - Chapter 6 - 8EE24089046林雯琪No ratings yet
- 351 - 27435 - EE419 - 2020 - 1 - 2 - 1 - 0 5 EE419 Lec9 Solution of State EquationsDocument15 pages351 - 27435 - EE419 - 2020 - 1 - 2 - 1 - 0 5 EE419 Lec9 Solution of State Equationsyoussef hossamNo ratings yet
- Stat 153 HW1Document1 pageStat 153 HW1DreamerNo ratings yet
- Dynamical SystemsDocument18 pagesDynamical Systemshung kungNo ratings yet
- Automatic Control 5 (State Variable Analysis)Document75 pagesAutomatic Control 5 (State Variable Analysis)J JJNo ratings yet
- ECN302E ProblemSet07 IntroductionToTSRAndForecastingPart1 SolutionsDocument5 pagesECN302E ProblemSet07 IntroductionToTSRAndForecastingPart1 SolutionsluluNo ratings yet
- Discrete Random Variables and Probability DistributionsDocument36 pagesDiscrete Random Variables and Probability DistributionsBeverly PamanNo ratings yet
- Discrete Approximation of Continuous Systems: CSE 421 Digital ControlDocument15 pagesDiscrete Approximation of Continuous Systems: CSE 421 Digital ControlAhmed YounisNo ratings yet
- Dougherty C12G06 2016 05 22Document31 pagesDougherty C12G06 2016 05 22rachmanmustafaNo ratings yet
- Introduction To Time Series Analysis: Gloria González-Rivera and Jesús Gonzalo U. Carlos III de MadridDocument25 pagesIntroduction To Time Series Analysis: Gloria González-Rivera and Jesús Gonzalo U. Carlos III de MadridTiliksew Wudie AssabeNo ratings yet
- 25.4.4 - The Method of Variation of Parameters Higher OrderDocument10 pages25.4.4 - The Method of Variation of Parameters Higher Orderanon_422073337No ratings yet
- DraftDocument3 pagesDraftChinh XuanNo ratings yet
- Proposed Solutions (A) Introduce Exogenous Variables: (I) Anderson-HsiaoDocument11 pagesProposed Solutions (A) Introduce Exogenous Variables: (I) Anderson-HsiaoSERGIO REQUENANo ratings yet
- ANN - Ch2-Adaline and MadalineDocument29 pagesANN - Ch2-Adaline and MadalineMuhanad Al-khalisy100% (1)
- 2 The Zero-Order Hold and The DAC Model: 2.1 Transfer Function of The ZOHDocument4 pages2 The Zero-Order Hold and The DAC Model: 2.1 Transfer Function of The ZOHYassine DjillaliNo ratings yet
- References: Economics CXIII, 315-34Document11 pagesReferences: Economics CXIII, 315-34mpc.9315970No ratings yet
- TSNotes 2Document28 pagesTSNotes 2YANGYUXINNo ratings yet
- Krolzig Macroeconometrics IDocument48 pagesKrolzig Macroeconometrics INaresh SrikakolapuNo ratings yet
- Chem 542 Spring2010 Lecture 6Document52 pagesChem 542 Spring2010 Lecture 6Omoshalewa AjayiNo ratings yet
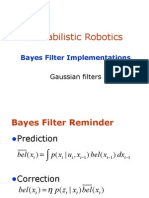
- Probabilistic Robotics: Bayes Filter ImplementationsDocument61 pagesProbabilistic Robotics: Bayes Filter ImplementationsMatt Brian CapangpanganNo ratings yet
- 1.applications of One-Dimensional ProblemsDocument78 pages1.applications of One-Dimensional ProblemsMICHEL RAJNo ratings yet
- E370Stat TimeDocument35 pagesE370Stat Timelia hibiscusNo ratings yet
- Frequency Domain Analysis Using Bode Plot: Swagat Kumar July 11, 2005Document57 pagesFrequency Domain Analysis Using Bode Plot: Swagat Kumar July 11, 2005ishann123No ratings yet
- EP 5511 - Lecture 09Document23 pagesEP 5511 - Lecture 09Solomon Tadesse AthlawNo ratings yet
- Tutorial 2 - SolDocument2 pagesTutorial 2 - SolVidaup40No ratings yet
- Models For Stationary Time Series: T T T PTP TDocument24 pagesModels For Stationary Time Series: T T T PTP TGeneral MasterNo ratings yet
- Solution of Discrete Time State Equations: EE-601: Linear System TheoryDocument42 pagesSolution of Discrete Time State Equations: EE-601: Linear System TheorysunilsahadevanNo ratings yet
- Multivariate Time Series ModelsDocument28 pagesMultivariate Time Series ModelsMd parvezsharifNo ratings yet
- Graphs and Tables of the Mathieu Functions and Their First DerivativesFrom EverandGraphs and Tables of the Mathieu Functions and Their First DerivativesNo ratings yet
- Stationarity and Unit Root TestingDocument21 pagesStationarity and Unit Root TestingAwAtef LHNo ratings yet
- Time Series AnalysisDocument58 pagesTime Series Analysistanishq kansalNo ratings yet
- Master Thesis v2 4Document53 pagesMaster Thesis v2 4Thomas AndersonNo ratings yet
- FORTRAN Programs For Space-Time Modeling: L. de Cesare, D.E. Myers, D. PosaDocument8 pagesFORTRAN Programs For Space-Time Modeling: L. de Cesare, D.E. Myers, D. PosaJonathan Nogales PimentelNo ratings yet
- (A Chapman & Hall Book) Masanobu Taniguchi, Hiroshi Shiraishi, Junichi Hirukawa, Hiroko Kato Solvang, Takashi Yamashita-Statistical Portfolio Estimation-CRC Press - Chapman and Hall - CRC (2018)Document389 pages(A Chapman & Hall Book) Masanobu Taniguchi, Hiroshi Shiraishi, Junichi Hirukawa, Hiroko Kato Solvang, Takashi Yamashita-Statistical Portfolio Estimation-CRC Press - Chapman and Hall - CRC (2018)Franklin feelNo ratings yet
- TS PartIIDocument50 pagesTS PartIIأبوسوار هندسة100% (1)
- 20EC3305 - PTRP - Assignment 2 Questions - 2022-23Document2 pages20EC3305 - PTRP - Assignment 2 Questions - 2022-23Krishna Sandilya JandhyalaNo ratings yet
- Unit I: Probability and Random VariablesDocument26 pagesUnit I: Probability and Random VariablesAndres Gonzalez CamachoNo ratings yet
- Journal 6 (Current Account Deficit) PDFDocument24 pagesJournal 6 (Current Account Deficit) PDFdaniswara 2No ratings yet
- Ma2262 1 2 &16 Mark Q&a (002-022)Document21 pagesMa2262 1 2 &16 Mark Q&a (002-022)Rajalakshmi NandhakumarNo ratings yet
- Job Matching and Wage DistributionDocument29 pagesJob Matching and Wage Distribution杨诗琪No ratings yet
- Exley Mehta SmithDocument32 pagesExley Mehta SmithRohit GuptaNo ratings yet
- Arima Modeling With R ListendataDocument12 pagesArima Modeling With R ListendataHarshalKolhatkarNo ratings yet
- Time Series Analysis Univariate and Multivariate Methods by William Wei PDF Pages 30 35Document6 pagesTime Series Analysis Univariate and Multivariate Methods by William Wei PDF Pages 30 35drs akmlNo ratings yet
- A S I P O T N S E O I: Tudy of Nitial Ublic Fferings On HE Ational Tock Xchange F NdiaDocument33 pagesA S I P O T N S E O I: Tudy of Nitial Ublic Fferings On HE Ational Tock Xchange F NdiarhtmhrNo ratings yet
- D 57 W 14 MtsolDocument8 pagesD 57 W 14 MtsolInstantRamenNo ratings yet
- Ardl 1Document166 pagesArdl 1sunil kumarNo ratings yet
- Rossmann Sales Prediction: Computing For Data Sciences-Final ProjectDocument46 pagesRossmann Sales Prediction: Computing For Data Sciences-Final Projectsai100% (1)
- Full Download Ebook PDF Introductory Econometrics For Finance 4th Edition PDFDocument41 pagesFull Download Ebook PDF Introductory Econometrics For Finance 4th Edition PDFtimothy.mees274100% (46)
- The Influence of Debit Card, Credit Card, and E-Money Transactions Toward Currency Demand in IndonesiaDocument8 pagesThe Influence of Debit Card, Credit Card, and E-Money Transactions Toward Currency Demand in IndonesiaLyris MerylNo ratings yet
- Datta - 1999 - Seismic Response of Buried Pipelines A State-Of-The-Art ReviewDocument14 pagesDatta - 1999 - Seismic Response of Buried Pipelines A State-Of-The-Art ReviewAnonymous wWOWz9UnWNo ratings yet
- Forecasting Energy Consumption of Turkey by ArimaDocument10 pagesForecasting Energy Consumption of Turkey by ArimaMuhammad Sajid AfridiNo ratings yet
- Random Processes: Saravanan Vijayakumaran Sarva@ee - Iitb.ac - inDocument12 pagesRandom Processes: Saravanan Vijayakumaran Sarva@ee - Iitb.ac - inShonNo ratings yet
- Markov Vs ArimaDocument93 pagesMarkov Vs ArimaDenBagoesNo ratings yet
- STAT0010 Introductory SlidesDocument67 pagesSTAT0010 Introductory SlidesMusa AsadNo ratings yet
- PQT Question BankDocument16 pagesPQT Question BankBalasubramani SrinivasanNo ratings yet
- GSLIB - Geostatistical Software Library and User's Guide (Applied Geostatistics Series)Document189 pagesGSLIB - Geostatistical Software Library and User's Guide (Applied Geostatistics Series)Fredy HCNo ratings yet
- Vector QuantizationDocument26 pagesVector QuantizationRafael AndradeNo ratings yet
- AStudyonAnalysisofStockPricesofSelectedIndustries-research GateDocument51 pagesAStudyonAnalysisofStockPricesofSelectedIndustries-research GateAvicena Ilham GhifarieNo ratings yet