
Undamped Free Vibration-Lab Report: Author: Muhammad Sohaib Alam
Undamped Free Vibration-Lab Report: Author: Muhammad Sohaib Alam
You might also like
- Phy 210 Experiment 1 Moment of Inertia and Angular MomentumDocument6 pagesPhy 210 Experiment 1 Moment of Inertia and Angular MomentumAkram AlRompini50% (2)
- Physics Internal AssessmentDocument14 pagesPhysics Internal AssessmentRachitNo ratings yet
- Lab Report Experiment 1 Pressure Measure-1Document6 pagesLab Report Experiment 1 Pressure Measure-1Pashew PirotNo ratings yet
- A-level Physics Revision: Cheeky Revision ShortcutsFrom EverandA-level Physics Revision: Cheeky Revision ShortcutsRating: 3 out of 5 stars3/5 (10)
- 380kV CT-VT Calculation - C4 - Rev - D 17.12.09Document137 pages380kV CT-VT Calculation - C4 - Rev - D 17.12.09siva2001eee80% (5)
- Experiment No. 4 Hooke's LawDocument4 pagesExperiment No. 4 Hooke's LawMahmoud SamahinNo ratings yet
- AP Lab Report 4Document8 pagesAP Lab Report 4Mashood AhmadNo ratings yet
- Dynamics of Machinery Report 1 12Document8 pagesDynamics of Machinery Report 1 12Sergen SerinNo ratings yet
- Lab 5 (... )Document9 pagesLab 5 (... )Zeeshan JuttNo ratings yet
- Uwi LabsDocument5 pagesUwi LabsKhaila SimmondNo ratings yet
- Lab Report: Applied PhysicsDocument7 pagesLab Report: Applied PhysicsMasoodNo ratings yet
- Combined Convection and Radiation Mechanical Engineering ThermoDocument15 pagesCombined Convection and Radiation Mechanical Engineering ThermoBhaggyaLakshanVidanarachchiNo ratings yet
- LAB 5 Job5Document5 pagesLAB 5 Job5Syed Intizar MehdiNo ratings yet
- Lab 5 (... )Document10 pagesLab 5 (... )Zeeshan JuttNo ratings yet
- Friction LabDocument3 pagesFriction LabAhmed SamirNo ratings yet
- Experiment 6 PHYS 105Document2 pagesExperiment 6 PHYS 105غالب الزبيريNo ratings yet
- LAB1 PhamTanThang s3635005Document7 pagesLAB1 PhamTanThang s3635005Terry PhamNo ratings yet
- تقارير العملي 201906672Document30 pagesتقارير العملي 201906672حسن كميت hassankomeit lNo ratings yet
- Hooke'S Law: Technical Report (Study Skill Assginment)Document10 pagesHooke'S Law: Technical Report (Study Skill Assginment)blandeye99No ratings yet
- Lab Report Phy Exp 2Document18 pagesLab Report Phy Exp 2FARHAH BATRISYIA ABDUL RAHIMNo ratings yet
- Hooke's Law PDFDocument3 pagesHooke's Law PDFAlicia’s MagicNo ratings yet
- Request 4Document5 pagesRequest 4austintanNo ratings yet
- PMPH120 - Lab 3 - SHM and Spring Constant - SolutionsDocument11 pagesPMPH120 - Lab 3 - SHM and Spring Constant - SolutionsTavonga ShokoNo ratings yet
- MDPN471 Omar MohsenDocument11 pagesMDPN471 Omar MohsenOmaroMohsenNo ratings yet
- Lab Report S1Document9 pagesLab Report S1Bart KwanNo ratings yet
- Experiment of Free Vibration: Natural Frequency of Spring-Mass System Without DampingDocument18 pagesExperiment of Free Vibration: Natural Frequency of Spring-Mass System Without DampingSuperHero JeroJeroNo ratings yet
- Lab Report Physics Hooke's LawDocument11 pagesLab Report Physics Hooke's LawAbu Huzaifah100% (1)
- Lab 6 Dakhil AlajmiDocument8 pagesLab 6 Dakhil AlajmiAshish PaliwalNo ratings yet
- IMPACTDocument10 pagesIMPACTMoses MushehenuNo ratings yet
- Labreport 2Document4 pagesLabreport 2Bertram NielsenNo ratings yet
- Experiment 105Document6 pagesExperiment 105Jasmin DionisioNo ratings yet
- Hooke Law: Education Physics, Faculty Teacher Training and Science Education, Madura Islamic UniversityDocument6 pagesHooke Law: Education Physics, Faculty Teacher Training and Science Education, Madura Islamic UniversityDiey LNo ratings yet
- Experiment 3: Ballistic PendulumDocument11 pagesExperiment 3: Ballistic PendulumsyafNo ratings yet
- Experiment No PDFDocument14 pagesExperiment No PDFMahmoud SamahinNo ratings yet
- Experiment No. (1) : Fine Measurements Aim of The ExperimentDocument14 pagesExperiment No. (1) : Fine Measurements Aim of The ExperimentMahmoud SamahinNo ratings yet
- Physics Lab 9Document5 pagesPhysics Lab 9omario normanNo ratings yet
- Physics ExpDocument6 pagesPhysics Expezio aboudNo ratings yet
- Lab Activity - Spring Mass System: Independent Dependent ControlDocument5 pagesLab Activity - Spring Mass System: Independent Dependent ControlSamhith Reddy VNo ratings yet
- Wheels and Springs: Simple Harmonic Motion.Document7 pagesWheels and Springs: Simple Harmonic Motion.Sam DeRoseNo ratings yet
- Exp 6 Melita 06Document14 pagesExp 6 Melita 06jumanneshambiNo ratings yet
- Final Physics IADocument14 pagesFinal Physics IAjonathan_coleman_933% (3)
- Lab Report Physics 1Document18 pagesLab Report Physics 1Nisa AzrinNo ratings yet
- Force Board: ENGD1005 Mechanical PrinciplesDocument6 pagesForce Board: ENGD1005 Mechanical PrinciplesLegendaryNNo ratings yet
- Ref 111 2 Data Analysis Assignment ReportDocument7 pagesRef 111 2 Data Analysis Assignment Report楊明倫No ratings yet
- Circular Motion ExperimentDocument7 pagesCircular Motion ExperimentictStactsNo ratings yet
- Balancing of Rotating MassesDocument17 pagesBalancing of Rotating MassesHasan AL-BahraniNo ratings yet
- Rigidity Modulous-1Document5 pagesRigidity Modulous-1Md Tazrian TanasNo ratings yet
- Lab Report 6Document7 pagesLab Report 6Abdullah AnjumNo ratings yet
- Calibration of A Bourdons Gauge Connected To Dead Weight TesterDocument5 pagesCalibration of A Bourdons Gauge Connected To Dead Weight TesterAdnAnKhanNo ratings yet
- Experiment 4a: The Slinky and The Ideal Spring - Static DeflectionDocument4 pagesExperiment 4a: The Slinky and The Ideal Spring - Static DeflectionPon CatoeraNo ratings yet
- RL Series Circuit - Math Project 2Document10 pagesRL Series Circuit - Math Project 2sllhahadlNo ratings yet
- Pendulum Lab ReportDocument15 pagesPendulum Lab ReportasifNo ratings yet
- Shear Force DiagramDocument16 pagesShear Force DiagramMuhammad ImranNo ratings yet
- Experiment # 3: Transverse Vibrations of Beam With One/more Bodies AttachedDocument12 pagesExperiment # 3: Transverse Vibrations of Beam With One/more Bodies AttachedMuhammad Farooq100% (1)
- Physics Lab Report: 5. ResonanceDocument11 pagesPhysics Lab Report: 5. Resonancemartin lutherNo ratings yet
- Lab 114 - Uniform Circular MotionDocument8 pagesLab 114 - Uniform Circular Motiontransfer ioNo ratings yet
- Hooke's Law: Background InformationDocument4 pagesHooke's Law: Background InformationMaan PatelNo ratings yet
- Physic Lab Report 1 (Correction)Document16 pagesPhysic Lab Report 1 (Correction)Khairun HusnaNo ratings yet
- Práctica # 2 ElasticidadDocument7 pagesPráctica # 2 ElasticidadBoris Fernando CalleNo ratings yet
- American International University-Bangladesh (Aiub)Document9 pagesAmerican International University-Bangladesh (Aiub)Shoaib KhanNo ratings yet
- Lab Sheet Experiment 2-StrengthDocument2 pagesLab Sheet Experiment 2-Strengthfaqhrul0% (1)
- Lab Dynamics 1 - Appendix B (M3)Document4 pagesLab Dynamics 1 - Appendix B (M3)faqhrulNo ratings yet
- Dynamics Lab Sheet 1 - Free Vibration Experiment - PKPDocument3 pagesDynamics Lab Sheet 1 - Free Vibration Experiment - PKPfaqhrulNo ratings yet
- Dynamics Lab Sheet 3 - Forced Vibration Experiment - PKPDocument3 pagesDynamics Lab Sheet 3 - Forced Vibration Experiment - PKPfaqhrulNo ratings yet
- Lab Dynamics 1 - Appendix B (M2)Document4 pagesLab Dynamics 1 - Appendix B (M2)faqhrulNo ratings yet
- ME 451 Mechanical Vibrations Laboratory Manual: A. G. Haddow Haddow@egr - Msu.edu Edited by G. D. RecktenwaldDocument42 pagesME 451 Mechanical Vibrations Laboratory Manual: A. G. Haddow Haddow@egr - Msu.edu Edited by G. D. RecktenwaldfaqhrulNo ratings yet
- Lab Sheet Experiment 1-StrengthDocument3 pagesLab Sheet Experiment 1-StrengthfaqhrulNo ratings yet
- Lab Sheet Experiment 3-StrengthDocument3 pagesLab Sheet Experiment 3-StrengthfaqhrulNo ratings yet
- Jominy End Quench: ENGR45 - Materials Science Laboratory Chad Philip JohnsonDocument5 pagesJominy End Quench: ENGR45 - Materials Science Laboratory Chad Philip JohnsonfaqhrulNo ratings yet
- The Jominy End Quench Test: HardenabilityDocument4 pagesThe Jominy End Quench Test: HardenabilityfaqhrulNo ratings yet
- Title: Bending Test: Materials Length Width Thickness Deflection of Beam (MM)Document2 pagesTitle: Bending Test: Materials Length Width Thickness Deflection of Beam (MM)faqhrulNo ratings yet
- DoITPoMS - TLP Library The Jominy End Quench Test - Example Test DataDocument2 pagesDoITPoMS - TLP Library The Jominy End Quench Test - Example Test DatafaqhrulNo ratings yet
- DoITPoMS - TLP Library The Jominy End Quench TestDocument12 pagesDoITPoMS - TLP Library The Jominy End Quench TestfaqhrulNo ratings yet
- Understanding The Jominy End-Quench Test - 2015-05-07 - Industrial HeatingDocument6 pagesUnderstanding The Jominy End-Quench Test - 2015-05-07 - Industrial HeatingfaqhrulNo ratings yet
- What Is A Jominy End Quench Test?Document18 pagesWhat Is A Jominy End Quench Test?faqhrulNo ratings yet
- The Jominy End Quench TestDocument6 pagesThe Jominy End Quench TestfaqhrulNo ratings yet
- Understanding The Jominy End Quench Test: Industrial Heating January 2001Document19 pagesUnderstanding The Jominy End Quench Test: Industrial Heating January 2001faqhrulNo ratings yet
- TransformerDocument30 pagesTransformerfaqhrulNo ratings yet
- 2-Lab Sheet Experiment 2 (Material) - Microstructure Study of Ferrous and Non Ferrous PDFDocument3 pages2-Lab Sheet Experiment 2 (Material) - Microstructure Study of Ferrous and Non Ferrous PDFfaqhrulNo ratings yet
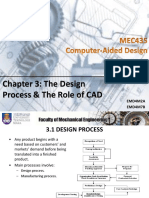
- Chapter 3: The Design Process & The Role of CAD: Emd4M2A Emd4M7BDocument59 pagesChapter 3: The Design Process & The Role of CAD: Emd4M2A Emd4M7BfaqhrulNo ratings yet
- 2-Lab Sheet Experiment 2 (Material) - Microstructure Study of Ferrous and Non Ferrous PDFDocument3 pages2-Lab Sheet Experiment 2 (Material) - Microstructure Study of Ferrous and Non Ferrous PDFfaqhrulNo ratings yet
- DC Machine-1Document37 pagesDC Machine-1faqhrulNo ratings yet
- MAT565 - Tutorial - Inverse LaplaceDocument2 pagesMAT565 - Tutorial - Inverse LaplacefaqhrulNo ratings yet
- MAT565 - Tutorial - Laplace TransformDocument3 pagesMAT565 - Tutorial - Laplace TransformfaqhrulNo ratings yet
- Atoms AssignmentDocument19 pagesAtoms AssignmentStephenNo ratings yet
- Pilot Operated Hung Diaphragm 1: Solenoid Valve 2/2 - NC (Normally Closed) G3/8Document2 pagesPilot Operated Hung Diaphragm 1: Solenoid Valve 2/2 - NC (Normally Closed) G3/8mogwai71No ratings yet
- Density (Calculation)Document28 pagesDensity (Calculation)Taufik PamisNo ratings yet
- Partial Molar Volume MeasurementDocument6 pagesPartial Molar Volume MeasurementWenzel Anne Orbase MallapreNo ratings yet
- State Biot Servat Law and Hence Obtain An Expression For The Magnetic Induction Produced by Infinite Long Current Carrying Conductor at Any Point Near ItDocument5 pagesState Biot Servat Law and Hence Obtain An Expression For The Magnetic Induction Produced by Infinite Long Current Carrying Conductor at Any Point Near ItAshok PradhanNo ratings yet
- PHY 1101 Physics1 - Course Outline (Spring 2023-2024)Document9 pagesPHY 1101 Physics1 - Course Outline (Spring 2023-2024)faisalfahim228No ratings yet
- Quantum Vehicle Propulsion: Jerry E. BaylesDocument6 pagesQuantum Vehicle Propulsion: Jerry E. BayleskokiskoNo ratings yet
- Low-Voltage Power Circuit Breakers and AC Power Circuit Protectors-Preferred Ratings, Related Requirements, and Application RecommendationsDocument29 pagesLow-Voltage Power Circuit Breakers and AC Power Circuit Protectors-Preferred Ratings, Related Requirements, and Application RecommendationsukritNo ratings yet
- Matt Visser - Traversable Wormholes: Some Simple ExamplesDocument7 pagesMatt Visser - Traversable Wormholes: Some Simple ExamplesRtpomNo ratings yet
- General Physics 1: Learning Activity Sheets TorqueDocument66 pagesGeneral Physics 1: Learning Activity Sheets TorqueUser IhmnidaNo ratings yet
- Pre-Calculus Chapter 5 Trigonometric Identities: Reciprocal Identities Even/Odd IdentitiesDocument2 pagesPre-Calculus Chapter 5 Trigonometric Identities: Reciprocal Identities Even/Odd IdentitiesDrew ClaryNo ratings yet
- LUXEN LUXPOWER SERIES 5 - N-TOPCon - BIFACIAL - 605-625 WDocument2 pagesLUXEN LUXPOWER SERIES 5 - N-TOPCon - BIFACIAL - 605-625 WBirshopulosNo ratings yet
- Halo Hook: Ammeter For Overhead Powerlines On Systems Up To 36kVDocument1 pageHalo Hook: Ammeter For Overhead Powerlines On Systems Up To 36kVsivasankarNo ratings yet
- Force Problems With AnswersDocument3 pagesForce Problems With AnswersABBY57% (7)
- Chapter 2 Examination Questions AnswersDocument5 pagesChapter 2 Examination Questions AnswersJack TerryNo ratings yet
- Projet RockyDocument19 pagesProjet RockyCassella AdrianoNo ratings yet
- Protective Device Used in Electrical InstallationDocument21 pagesProtective Device Used in Electrical Installation622 MANSI TANJILANo ratings yet
- Att. 1 - Data Sheet Temperature Sensor ATF 2-S+SDocument6 pagesAtt. 1 - Data Sheet Temperature Sensor ATF 2-S+Sjose almironNo ratings yet
- Solar Renewable EneggyDocument12 pagesSolar Renewable EneggysamyektapolNo ratings yet
- Performance Analysis and Comparison of Conventional and Interleaved DC/DC Boost Converter Using MULTISMDocument10 pagesPerformance Analysis and Comparison of Conventional and Interleaved DC/DC Boost Converter Using MULTISMIam AbdiwaliNo ratings yet
- NSEP 2014 SolutioNDocument26 pagesNSEP 2014 SolutioNTanmayNo ratings yet
- ACCUMULATORS Part-A Question and AnswersDocument10 pagesACCUMULATORS Part-A Question and Answerssar_tpgitNo ratings yet
- 3 Assignment SolutionDocument3 pages3 Assignment SolutionJohnson JohnsonNo ratings yet
- Notes in MechanicsDocument7 pagesNotes in Mechanicsjoseph.datoonNo ratings yet
- Workenergyandpowerppt 131208202046 Phpapp02Document26 pagesWorkenergyandpowerppt 131208202046 Phpapp02joyNo ratings yet
- 1FL6032 2AF21 1LB1 Datasheet enDocument1 page1FL6032 2AF21 1LB1 Datasheet enRamesh PeddagoudNo ratings yet
- Fisa Tehnica AHU-01Document9 pagesFisa Tehnica AHU-01Liviu ToaderNo ratings yet
- Room Checksums: by Gulf Consult 1St-Extra Bedroom Heating Coil Peak CLG Space Peak Cooling Coil Peak TemperaturesDocument50 pagesRoom Checksums: by Gulf Consult 1St-Extra Bedroom Heating Coil Peak CLG Space Peak Cooling Coil Peak TemperaturesSajidNo ratings yet
- Appendix A: Examination ReferenceDocument23 pagesAppendix A: Examination ReferenceRehan hassan janjuaNo ratings yet















































































































Download as pdf or txt
You might also like
- Phy 210 Experiment 1 Moment of Inertia and Angular MomentumDocument6 pagesPhy 210 Experiment 1 Moment of Inertia and Angular MomentumAkram AlRompini50% (2)
- Physics Internal AssessmentDocument14 pagesPhysics Internal AssessmentRachitNo ratings yet
- Lab Report Experiment 1 Pressure Measure-1Document6 pagesLab Report Experiment 1 Pressure Measure-1Pashew PirotNo ratings yet
- A-level Physics Revision: Cheeky Revision ShortcutsFrom EverandA-level Physics Revision: Cheeky Revision ShortcutsRating: 3 out of 5 stars3/5 (10)
- 380kV CT-VT Calculation - C4 - Rev - D 17.12.09Document137 pages380kV CT-VT Calculation - C4 - Rev - D 17.12.09siva2001eee80% (5)
- Experiment No. 4 Hooke's LawDocument4 pagesExperiment No. 4 Hooke's LawMahmoud SamahinNo ratings yet
- AP Lab Report 4Document8 pagesAP Lab Report 4Mashood AhmadNo ratings yet
- Dynamics of Machinery Report 1 12Document8 pagesDynamics of Machinery Report 1 12Sergen SerinNo ratings yet
- Lab 5 (... )Document9 pagesLab 5 (... )Zeeshan JuttNo ratings yet
- Uwi LabsDocument5 pagesUwi LabsKhaila SimmondNo ratings yet
- Lab Report: Applied PhysicsDocument7 pagesLab Report: Applied PhysicsMasoodNo ratings yet
- Combined Convection and Radiation Mechanical Engineering ThermoDocument15 pagesCombined Convection and Radiation Mechanical Engineering ThermoBhaggyaLakshanVidanarachchiNo ratings yet
- LAB 5 Job5Document5 pagesLAB 5 Job5Syed Intizar MehdiNo ratings yet
- Lab 5 (... )Document10 pagesLab 5 (... )Zeeshan JuttNo ratings yet
- Friction LabDocument3 pagesFriction LabAhmed SamirNo ratings yet
- Experiment 6 PHYS 105Document2 pagesExperiment 6 PHYS 105غالب الزبيريNo ratings yet
- LAB1 PhamTanThang s3635005Document7 pagesLAB1 PhamTanThang s3635005Terry PhamNo ratings yet
- تقارير العملي 201906672Document30 pagesتقارير العملي 201906672حسن كميت hassankomeit lNo ratings yet
- Hooke'S Law: Technical Report (Study Skill Assginment)Document10 pagesHooke'S Law: Technical Report (Study Skill Assginment)blandeye99No ratings yet
- Lab Report Phy Exp 2Document18 pagesLab Report Phy Exp 2FARHAH BATRISYIA ABDUL RAHIMNo ratings yet
- Hooke's Law PDFDocument3 pagesHooke's Law PDFAlicia’s MagicNo ratings yet
- Request 4Document5 pagesRequest 4austintanNo ratings yet
- PMPH120 - Lab 3 - SHM and Spring Constant - SolutionsDocument11 pagesPMPH120 - Lab 3 - SHM and Spring Constant - SolutionsTavonga ShokoNo ratings yet
- MDPN471 Omar MohsenDocument11 pagesMDPN471 Omar MohsenOmaroMohsenNo ratings yet
- Lab Report S1Document9 pagesLab Report S1Bart KwanNo ratings yet
- Experiment of Free Vibration: Natural Frequency of Spring-Mass System Without DampingDocument18 pagesExperiment of Free Vibration: Natural Frequency of Spring-Mass System Without DampingSuperHero JeroJeroNo ratings yet
- Lab Report Physics Hooke's LawDocument11 pagesLab Report Physics Hooke's LawAbu Huzaifah100% (1)
- Lab 6 Dakhil AlajmiDocument8 pagesLab 6 Dakhil AlajmiAshish PaliwalNo ratings yet
- IMPACTDocument10 pagesIMPACTMoses MushehenuNo ratings yet
- Labreport 2Document4 pagesLabreport 2Bertram NielsenNo ratings yet
- Experiment 105Document6 pagesExperiment 105Jasmin DionisioNo ratings yet
- Hooke Law: Education Physics, Faculty Teacher Training and Science Education, Madura Islamic UniversityDocument6 pagesHooke Law: Education Physics, Faculty Teacher Training and Science Education, Madura Islamic UniversityDiey LNo ratings yet
- Experiment 3: Ballistic PendulumDocument11 pagesExperiment 3: Ballistic PendulumsyafNo ratings yet
- Experiment No PDFDocument14 pagesExperiment No PDFMahmoud SamahinNo ratings yet
- Experiment No. (1) : Fine Measurements Aim of The ExperimentDocument14 pagesExperiment No. (1) : Fine Measurements Aim of The ExperimentMahmoud SamahinNo ratings yet
- Physics Lab 9Document5 pagesPhysics Lab 9omario normanNo ratings yet
- Physics ExpDocument6 pagesPhysics Expezio aboudNo ratings yet
- Lab Activity - Spring Mass System: Independent Dependent ControlDocument5 pagesLab Activity - Spring Mass System: Independent Dependent ControlSamhith Reddy VNo ratings yet
- Wheels and Springs: Simple Harmonic Motion.Document7 pagesWheels and Springs: Simple Harmonic Motion.Sam DeRoseNo ratings yet
- Exp 6 Melita 06Document14 pagesExp 6 Melita 06jumanneshambiNo ratings yet
- Final Physics IADocument14 pagesFinal Physics IAjonathan_coleman_933% (3)
- Lab Report Physics 1Document18 pagesLab Report Physics 1Nisa AzrinNo ratings yet
- Force Board: ENGD1005 Mechanical PrinciplesDocument6 pagesForce Board: ENGD1005 Mechanical PrinciplesLegendaryNNo ratings yet
- Ref 111 2 Data Analysis Assignment ReportDocument7 pagesRef 111 2 Data Analysis Assignment Report楊明倫No ratings yet
- Circular Motion ExperimentDocument7 pagesCircular Motion ExperimentictStactsNo ratings yet
- Balancing of Rotating MassesDocument17 pagesBalancing of Rotating MassesHasan AL-BahraniNo ratings yet
- Rigidity Modulous-1Document5 pagesRigidity Modulous-1Md Tazrian TanasNo ratings yet
- Lab Report 6Document7 pagesLab Report 6Abdullah AnjumNo ratings yet
- Calibration of A Bourdons Gauge Connected To Dead Weight TesterDocument5 pagesCalibration of A Bourdons Gauge Connected To Dead Weight TesterAdnAnKhanNo ratings yet
- Experiment 4a: The Slinky and The Ideal Spring - Static DeflectionDocument4 pagesExperiment 4a: The Slinky and The Ideal Spring - Static DeflectionPon CatoeraNo ratings yet
- RL Series Circuit - Math Project 2Document10 pagesRL Series Circuit - Math Project 2sllhahadlNo ratings yet
- Pendulum Lab ReportDocument15 pagesPendulum Lab ReportasifNo ratings yet
- Shear Force DiagramDocument16 pagesShear Force DiagramMuhammad ImranNo ratings yet
- Experiment # 3: Transverse Vibrations of Beam With One/more Bodies AttachedDocument12 pagesExperiment # 3: Transverse Vibrations of Beam With One/more Bodies AttachedMuhammad Farooq100% (1)
- Physics Lab Report: 5. ResonanceDocument11 pagesPhysics Lab Report: 5. Resonancemartin lutherNo ratings yet
- Lab 114 - Uniform Circular MotionDocument8 pagesLab 114 - Uniform Circular Motiontransfer ioNo ratings yet
- Hooke's Law: Background InformationDocument4 pagesHooke's Law: Background InformationMaan PatelNo ratings yet
- Physic Lab Report 1 (Correction)Document16 pagesPhysic Lab Report 1 (Correction)Khairun HusnaNo ratings yet
- Práctica # 2 ElasticidadDocument7 pagesPráctica # 2 ElasticidadBoris Fernando CalleNo ratings yet
- American International University-Bangladesh (Aiub)Document9 pagesAmerican International University-Bangladesh (Aiub)Shoaib KhanNo ratings yet
- Lab Sheet Experiment 2-StrengthDocument2 pagesLab Sheet Experiment 2-Strengthfaqhrul0% (1)
- Lab Dynamics 1 - Appendix B (M3)Document4 pagesLab Dynamics 1 - Appendix B (M3)faqhrulNo ratings yet
- Dynamics Lab Sheet 1 - Free Vibration Experiment - PKPDocument3 pagesDynamics Lab Sheet 1 - Free Vibration Experiment - PKPfaqhrulNo ratings yet
- Dynamics Lab Sheet 3 - Forced Vibration Experiment - PKPDocument3 pagesDynamics Lab Sheet 3 - Forced Vibration Experiment - PKPfaqhrulNo ratings yet
- Lab Dynamics 1 - Appendix B (M2)Document4 pagesLab Dynamics 1 - Appendix B (M2)faqhrulNo ratings yet
- ME 451 Mechanical Vibrations Laboratory Manual: A. G. Haddow Haddow@egr - Msu.edu Edited by G. D. RecktenwaldDocument42 pagesME 451 Mechanical Vibrations Laboratory Manual: A. G. Haddow Haddow@egr - Msu.edu Edited by G. D. RecktenwaldfaqhrulNo ratings yet
- Lab Sheet Experiment 1-StrengthDocument3 pagesLab Sheet Experiment 1-StrengthfaqhrulNo ratings yet
- Lab Sheet Experiment 3-StrengthDocument3 pagesLab Sheet Experiment 3-StrengthfaqhrulNo ratings yet
- Jominy End Quench: ENGR45 - Materials Science Laboratory Chad Philip JohnsonDocument5 pagesJominy End Quench: ENGR45 - Materials Science Laboratory Chad Philip JohnsonfaqhrulNo ratings yet
- The Jominy End Quench Test: HardenabilityDocument4 pagesThe Jominy End Quench Test: HardenabilityfaqhrulNo ratings yet
- Title: Bending Test: Materials Length Width Thickness Deflection of Beam (MM)Document2 pagesTitle: Bending Test: Materials Length Width Thickness Deflection of Beam (MM)faqhrulNo ratings yet
- DoITPoMS - TLP Library The Jominy End Quench Test - Example Test DataDocument2 pagesDoITPoMS - TLP Library The Jominy End Quench Test - Example Test DatafaqhrulNo ratings yet
- DoITPoMS - TLP Library The Jominy End Quench TestDocument12 pagesDoITPoMS - TLP Library The Jominy End Quench TestfaqhrulNo ratings yet
- Understanding The Jominy End-Quench Test - 2015-05-07 - Industrial HeatingDocument6 pagesUnderstanding The Jominy End-Quench Test - 2015-05-07 - Industrial HeatingfaqhrulNo ratings yet
- What Is A Jominy End Quench Test?Document18 pagesWhat Is A Jominy End Quench Test?faqhrulNo ratings yet
- The Jominy End Quench TestDocument6 pagesThe Jominy End Quench TestfaqhrulNo ratings yet
- Understanding The Jominy End Quench Test: Industrial Heating January 2001Document19 pagesUnderstanding The Jominy End Quench Test: Industrial Heating January 2001faqhrulNo ratings yet
- TransformerDocument30 pagesTransformerfaqhrulNo ratings yet
- 2-Lab Sheet Experiment 2 (Material) - Microstructure Study of Ferrous and Non Ferrous PDFDocument3 pages2-Lab Sheet Experiment 2 (Material) - Microstructure Study of Ferrous and Non Ferrous PDFfaqhrulNo ratings yet
- Chapter 3: The Design Process & The Role of CAD: Emd4M2A Emd4M7BDocument59 pagesChapter 3: The Design Process & The Role of CAD: Emd4M2A Emd4M7BfaqhrulNo ratings yet
- 2-Lab Sheet Experiment 2 (Material) - Microstructure Study of Ferrous and Non Ferrous PDFDocument3 pages2-Lab Sheet Experiment 2 (Material) - Microstructure Study of Ferrous and Non Ferrous PDFfaqhrulNo ratings yet
- DC Machine-1Document37 pagesDC Machine-1faqhrulNo ratings yet
- MAT565 - Tutorial - Inverse LaplaceDocument2 pagesMAT565 - Tutorial - Inverse LaplacefaqhrulNo ratings yet
- MAT565 - Tutorial - Laplace TransformDocument3 pagesMAT565 - Tutorial - Laplace TransformfaqhrulNo ratings yet
- Atoms AssignmentDocument19 pagesAtoms AssignmentStephenNo ratings yet
- Pilot Operated Hung Diaphragm 1: Solenoid Valve 2/2 - NC (Normally Closed) G3/8Document2 pagesPilot Operated Hung Diaphragm 1: Solenoid Valve 2/2 - NC (Normally Closed) G3/8mogwai71No ratings yet
- Density (Calculation)Document28 pagesDensity (Calculation)Taufik PamisNo ratings yet
- Partial Molar Volume MeasurementDocument6 pagesPartial Molar Volume MeasurementWenzel Anne Orbase MallapreNo ratings yet
- State Biot Servat Law and Hence Obtain An Expression For The Magnetic Induction Produced by Infinite Long Current Carrying Conductor at Any Point Near ItDocument5 pagesState Biot Servat Law and Hence Obtain An Expression For The Magnetic Induction Produced by Infinite Long Current Carrying Conductor at Any Point Near ItAshok PradhanNo ratings yet
- PHY 1101 Physics1 - Course Outline (Spring 2023-2024)Document9 pagesPHY 1101 Physics1 - Course Outline (Spring 2023-2024)faisalfahim228No ratings yet
- Quantum Vehicle Propulsion: Jerry E. BaylesDocument6 pagesQuantum Vehicle Propulsion: Jerry E. BayleskokiskoNo ratings yet
- Low-Voltage Power Circuit Breakers and AC Power Circuit Protectors-Preferred Ratings, Related Requirements, and Application RecommendationsDocument29 pagesLow-Voltage Power Circuit Breakers and AC Power Circuit Protectors-Preferred Ratings, Related Requirements, and Application RecommendationsukritNo ratings yet
- Matt Visser - Traversable Wormholes: Some Simple ExamplesDocument7 pagesMatt Visser - Traversable Wormholes: Some Simple ExamplesRtpomNo ratings yet
- General Physics 1: Learning Activity Sheets TorqueDocument66 pagesGeneral Physics 1: Learning Activity Sheets TorqueUser IhmnidaNo ratings yet
- Pre-Calculus Chapter 5 Trigonometric Identities: Reciprocal Identities Even/Odd IdentitiesDocument2 pagesPre-Calculus Chapter 5 Trigonometric Identities: Reciprocal Identities Even/Odd IdentitiesDrew ClaryNo ratings yet
- LUXEN LUXPOWER SERIES 5 - N-TOPCon - BIFACIAL - 605-625 WDocument2 pagesLUXEN LUXPOWER SERIES 5 - N-TOPCon - BIFACIAL - 605-625 WBirshopulosNo ratings yet
- Halo Hook: Ammeter For Overhead Powerlines On Systems Up To 36kVDocument1 pageHalo Hook: Ammeter For Overhead Powerlines On Systems Up To 36kVsivasankarNo ratings yet
- Force Problems With AnswersDocument3 pagesForce Problems With AnswersABBY57% (7)
- Chapter 2 Examination Questions AnswersDocument5 pagesChapter 2 Examination Questions AnswersJack TerryNo ratings yet
- Projet RockyDocument19 pagesProjet RockyCassella AdrianoNo ratings yet
- Protective Device Used in Electrical InstallationDocument21 pagesProtective Device Used in Electrical Installation622 MANSI TANJILANo ratings yet
- Att. 1 - Data Sheet Temperature Sensor ATF 2-S+SDocument6 pagesAtt. 1 - Data Sheet Temperature Sensor ATF 2-S+Sjose almironNo ratings yet
- Solar Renewable EneggyDocument12 pagesSolar Renewable EneggysamyektapolNo ratings yet
- Performance Analysis and Comparison of Conventional and Interleaved DC/DC Boost Converter Using MULTISMDocument10 pagesPerformance Analysis and Comparison of Conventional and Interleaved DC/DC Boost Converter Using MULTISMIam AbdiwaliNo ratings yet
- NSEP 2014 SolutioNDocument26 pagesNSEP 2014 SolutioNTanmayNo ratings yet
- ACCUMULATORS Part-A Question and AnswersDocument10 pagesACCUMULATORS Part-A Question and Answerssar_tpgitNo ratings yet
- 3 Assignment SolutionDocument3 pages3 Assignment SolutionJohnson JohnsonNo ratings yet
- Notes in MechanicsDocument7 pagesNotes in Mechanicsjoseph.datoonNo ratings yet
- Workenergyandpowerppt 131208202046 Phpapp02Document26 pagesWorkenergyandpowerppt 131208202046 Phpapp02joyNo ratings yet
- 1FL6032 2AF21 1LB1 Datasheet enDocument1 page1FL6032 2AF21 1LB1 Datasheet enRamesh PeddagoudNo ratings yet
- Fisa Tehnica AHU-01Document9 pagesFisa Tehnica AHU-01Liviu ToaderNo ratings yet
- Room Checksums: by Gulf Consult 1St-Extra Bedroom Heating Coil Peak CLG Space Peak Cooling Coil Peak TemperaturesDocument50 pagesRoom Checksums: by Gulf Consult 1St-Extra Bedroom Heating Coil Peak CLG Space Peak Cooling Coil Peak TemperaturesSajidNo ratings yet
- Appendix A: Examination ReferenceDocument23 pagesAppendix A: Examination ReferenceRehan hassan janjuaNo ratings yet