Download as pdf or txt
You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5823)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1093)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (852)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (590)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (898)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (541)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (349)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- WMS Course NotesDocument24 pagesWMS Course Notesnizamshaik03260No ratings yet
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (823)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (403)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Module 6 SlidesDocument55 pagesModule 6 Slidesyashar2500No ratings yet
- Module 5 SlidesDocument53 pagesModule 5 Slidesyashar2500No ratings yet
- Quiz 5 SolutionsDocument5 pagesQuiz 5 Solutionsyashar250067% (6)
- Deploy Chatbot On Wordpress PDFDocument27 pagesDeploy Chatbot On Wordpress PDFShivam GhungardeNo ratings yet
- Design ProcessesDocument13 pagesDesign Processesyashar2500No ratings yet
- Trig Cheat Sheet ReducedDocument2 pagesTrig Cheat Sheet ReducedMritunjay KumarNo ratings yet
- Physical Computing101: Part 2: Control of Mobile Robots: Hardware Lecture #6Document7 pagesPhysical Computing101: Part 2: Control of Mobile Robots: Hardware Lecture #6yashar2500No ratings yet
- Physical Computing101: Part 3: Control of Mobile Robots: Hardware Lecture #7Document8 pagesPhysical Computing101: Part 3: Control of Mobile Robots: Hardware Lecture #7yashar2500No ratings yet
- Programming & Simulation Lecture 7 SlidesDocument11 pagesProgramming & Simulation Lecture 7 Slidesyashar2500No ratings yet
- Quiz 7 SolutionsDocument6 pagesQuiz 7 Solutionsyashar2500100% (2)
- Module 7 SlidesDocument54 pagesModule 7 Slidesyashar2500No ratings yet
- Control of Mobile Robots: Glue Lectures: InstructorDocument9 pagesControl of Mobile Robots: Glue Lectures: Instructoryashar2500No ratings yet
- Quiz 6 SolutionsDocument3 pagesQuiz 6 Solutionsyashar2500100% (2)
- Physical Computing101: Part 1: Control of Mobile Robots: Hardware Lecture #5Document6 pagesPhysical Computing101: Part 1: Control of Mobile Robots: Hardware Lecture #5yashar2500No ratings yet
- Quiz 4 SolutionsDocument4 pagesQuiz 4 Solutionsjcvoscrib89% (9)
- Control of Mobile Robots: Glue Lectures: InstructorDocument23 pagesControl of Mobile Robots: Glue Lectures: Instructoryashar2500No ratings yet
- Hardware Lecture 3 SlidesDocument54 pagesHardware Lecture 3 Slidesyashar2500No ratings yet
- Quiz 3 SolutionsDocument5 pagesQuiz 3 Solutionsyashar250075% (4)
- Sim.I.am - A Robot SimulatorDocument27 pagesSim.I.am - A Robot Simulatoryashar2500No ratings yet
- Module 2 SlidesDocument35 pagesModule 2 Slidesyashar2500No ratings yet
- Module 3 Slides PDFDocument65 pagesModule 3 Slides PDFyashar2500No ratings yet
- Control of Mobile Robots: Glue Lectures: InstructorDocument13 pagesControl of Mobile Robots: Glue Lectures: Instructoryashar2500No ratings yet
- Programming & Simulation Lecture 1 SlidesDocument8 pagesProgramming & Simulation Lecture 1 Slidesyashar2500No ratings yet
- E Passport Tracking System FebDocument45 pagesE Passport Tracking System FebGokul krishnanNo ratings yet
- NS2Document11 pagesNS2Nikumani ChoudhuryNo ratings yet
- Long Beach, A Sunlife Resort - 5 Star Luxury Resort in MauritiussDocument1 pageLong Beach, A Sunlife Resort - 5 Star Luxury Resort in MauritiussdsfgfNo ratings yet
- TCL ManualDocument30 pagesTCL ManualJoonho ShinNo ratings yet
- Graphics Cards Tested 2019 r1Document2 pagesGraphics Cards Tested 2019 r1Nicola PieriNo ratings yet
- Python Workbook 1Document10 pagesPython Workbook 1rajefiNo ratings yet
- An Introduction To LibuvDocument63 pagesAn Introduction To LibuvRamarolahy Dadan'i EliaNo ratings yet
- Transducer CatalogDocument36 pagesTransducer Catalogcarlosguerra_No ratings yet
- Ota RevisedDocument12 pagesOta RevisedNeha PatelNo ratings yet
- FpseDocument8 pagesFpselucasgms264No ratings yet
- Grup 5 SHSRDocument9 pagesGrup 5 SHSRSupariyantoNo ratings yet
- SAP 101 - Beginners SAPDocument15 pagesSAP 101 - Beginners SAPAdarsh100% (3)
- WAS Labs V38Document74 pagesWAS Labs V38AndresNo ratings yet
- Smart Meter Refusal LetterDocument1 pageSmart Meter Refusal Lettereditor9357No ratings yet
- Automobile Tracking System Using Gps and GSM: Jaya Ram Khatri ChhetriDocument49 pagesAutomobile Tracking System Using Gps and GSM: Jaya Ram Khatri Chhetrioluwakayode olabanjiNo ratings yet
- Yokogawa Conductivity MeterDocument4 pagesYokogawa Conductivity MetersaravananbscelecNo ratings yet
- MCP73871 CargadorDocument38 pagesMCP73871 CargadorGEROSVINo ratings yet
- Root & Unroot I9082 v4.2.2Document11 pagesRoot & Unroot I9082 v4.2.2duytrung2121No ratings yet
- DV 757aiDocument159 pagesDV 757aikumbrovNo ratings yet
- Muratec MFX2830 Field Engineer Manual (Field Service)Document637 pagesMuratec MFX2830 Field Engineer Manual (Field Service)ADCOOP100% (1)
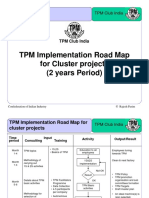
- TPM Road MapDocument4 pagesTPM Road Mapsanjeev singhNo ratings yet
- The AutoCAD Working EnvironmentDocument39 pagesThe AutoCAD Working Environmentkim hana100% (1)
- National Institute of Technology, Raipur: Smart Irrigation System Using LoraDocument22 pagesNational Institute of Technology, Raipur: Smart Irrigation System Using LoraHimanshu VermaNo ratings yet
- Low Cost RTL-SDR Based Positioning Solution Based On GSM Cell IdDocument6 pagesLow Cost RTL-SDR Based Positioning Solution Based On GSM Cell IdBrahim DehriNo ratings yet
- Data Mangement OTMDMDocument98 pagesData Mangement OTMDMChithra SNo ratings yet
- DC9 Fault CodesDocument5 pagesDC9 Fault CodesfeukamNo ratings yet
- 4.3 Pre-Requisites To Paragraph WritingDocument39 pages4.3 Pre-Requisites To Paragraph WritingMukul Kumar RanaNo ratings yet
- Table: Concrete Design 1 - Column Summary Data - Aci 318-05/ibc2003 Frame Designsect Designtype Designopt Status Location Pmmcombo Pmmarea Pmmratio Vmajcombo Vmajrebar VmincomboDocument7 pagesTable: Concrete Design 1 - Column Summary Data - Aci 318-05/ibc2003 Frame Designsect Designtype Designopt Status Location Pmmcombo Pmmarea Pmmratio Vmajcombo Vmajrebar VmincomboEko PutraNo ratings yet