Download as pdf or txt
You might also like
- Triple PendulumDocument9 pagesTriple PendulumSalvador SilveyraNo ratings yet
- Duke XC SL Race ServiceDocument10 pagesDuke XC SL Race ServicesilverapeNo ratings yet
- Research ArticleDocument10 pagesResearch Articleattiq ur RehmanNo ratings yet
- Symmetry: Dynamic Behavior Analysis of A High-Rise Traction System With Tensioned Pulley Acting On Compensating RopeDocument26 pagesSymmetry: Dynamic Behavior Analysis of A High-Rise Traction System With Tensioned Pulley Acting On Compensating RopejayakumarNo ratings yet
- Dynamic Response of A Front End Accessory Drive System and Parameter Optimization For Vibration Reduction Via A Genetic AlgorithmDocument20 pagesDynamic Response of A Front End Accessory Drive System and Parameter Optimization For Vibration Reduction Via A Genetic AlgorithmTushar SharmaNo ratings yet
- Jam Jan05Document11 pagesJam Jan05TMBryan Naufal AlfiansyahNo ratings yet
- 《Journal of Vibration and Acoustics》One-way Clutch and belt bending stiffnessDocument14 pages《Journal of Vibration and Acoustics》One-way Clutch and belt bending stiffnessKESAVANNo ratings yet
- 3 BearingDocument8 pages3 Bearingjamila mahmoudNo ratings yet
- Article AMB First PNGDocument31 pagesArticle AMB First PNGFABIEN KENMOGNENo ratings yet
- Serpentine Belt Drive ProjectDocument9 pagesSerpentine Belt Drive ProjectMitch HoweNo ratings yet
- Design and Analysis of Automotive Serpentine Belt Drive Systems For Steady State PerformanceDocument8 pagesDesign and Analysis of Automotive Serpentine Belt Drive Systems For Steady State PerformancePrabhat SharmaNo ratings yet
- Beikmann JVA 1996Document8 pagesBeikmann JVA 1996sahil.s237192101No ratings yet
- Analysis of The Thread Guide Drive Mechanism: Ryszard PrzytulskiDocument3 pagesAnalysis of The Thread Guide Drive Mechanism: Ryszard PrzytulskiYashavant PatelNo ratings yet
- Dynamic Analysis of Geared Rotors by Finite ElementsDocument22 pagesDynamic Analysis of Geared Rotors by Finite ElementsVraj SenjaliyaNo ratings yet
- Analytical and Experimental Investigation of Elastic Slider-Crank MechanismsDocument6 pagesAnalytical and Experimental Investigation of Elastic Slider-Crank Mechanismsyangee1201No ratings yet
- 1991 - Bearings MathmodelDocument22 pages1991 - Bearings MathmodelChiara GastaldiNo ratings yet
- An Experimental Study of Whirling Characteristics of Gear-Pinion Rotor SystemDocument4 pagesAn Experimental Study of Whirling Characteristics of Gear-Pinion Rotor SystemBunty PereraNo ratings yet
- Vibration Characteristics of A Rotor-Bearing System Caused Due To Coupling Misalignment - A ReviewDocument10 pagesVibration Characteristics of A Rotor-Bearing System Caused Due To Coupling Misalignment - A ReviewAmirmohamad AzimiNo ratings yet
- Alsaleh2020 Article ExperimentalAndTheoreticalInve PDFDocument9 pagesAlsaleh2020 Article ExperimentalAndTheoreticalInve PDFSamiUllahNo ratings yet
- Design Optimization Analysis of An Anti-Backlash GearedDocument15 pagesDesign Optimization Analysis of An Anti-Backlash GearedひろしNo ratings yet
- European Journal of Mechanics / A Solids: Zhen Li, Qingshan Wang, Bin Qin, Wen ShaoDocument19 pagesEuropean Journal of Mechanics / A Solids: Zhen Li, Qingshan Wang, Bin Qin, Wen ShaoRafael SoaresNo ratings yet
- Journal of Sound and Vibration: Qinkai Han, Jingshan Zhao, Fulei ChuDocument21 pagesJournal of Sound and Vibration: Qinkai Han, Jingshan Zhao, Fulei ChuDamarla KiranNo ratings yet
- KOM Lect5Document36 pagesKOM Lect5Pranav C PNo ratings yet
- Stable Synchronization Ofmechanical System NetworksDocument23 pagesStable Synchronization Ofmechanical System NetworksRuben HernandezNo ratings yet
- 4 UnbalanceDocument9 pages4 Unbalancerola mohamedNo ratings yet
- Experiment4 Group3Document43 pagesExperiment4 Group3debojit.dasNo ratings yet
- Title: Pneumatic Power Steering SystemDocument2 pagesTitle: Pneumatic Power Steering SystemFrenz VillasisNo ratings yet
- Influence of Lateral Vibrations On The Whirling Characteristics of Gear-Pinion Rotor SystemDocument7 pagesInfluence of Lateral Vibrations On The Whirling Characteristics of Gear-Pinion Rotor Systemuamiranda3518No ratings yet
- Compliant Folded Beam Suspension MechanismDocument18 pagesCompliant Folded Beam Suspension Mechanismomer elaminNo ratings yet
- Mechanical Systems and Signal Processing: J. Parra, Cristián Molina VicuñaDocument13 pagesMechanical Systems and Signal Processing: J. Parra, Cristián Molina VicuñaKurniawan E PNo ratings yet
- International Journal of Non-Linear Mechanics: H. Ding, G.C. Zhang, L.Q. ChenDocument10 pagesInternational Journal of Non-Linear Mechanics: H. Ding, G.C. Zhang, L.Q. ChenRotNo ratings yet
- Machines 10 01052 v3Document25 pagesMachines 10 01052 v3Karthikeyan NatarajanNo ratings yet
- 5 FF 4 BBFD 45851553 A 02276 B 8Document7 pages5 FF 4 BBFD 45851553 A 02276 B 8hussein9388hsNo ratings yet
- 1 s2.0 S1474667017590072 MainDocument6 pages1 s2.0 S1474667017590072 MainAttila NagyNo ratings yet
- Design and Analysis of A Compliant Parallel Pan-Tilt Platform 2015Document12 pagesDesign and Analysis of A Compliant Parallel Pan-Tilt Platform 2015newkid2202No ratings yet
- A Roller Chain Drive Model Including Contact With Guide-BarsDocument18 pagesA Roller Chain Drive Model Including Contact With Guide-BarsPietroNo ratings yet
- A Roller Chain Drive Model Including Contact With Guide-BarsDocument18 pagesA Roller Chain Drive Model Including Contact With Guide-BarsTrúc LinhhNo ratings yet
- A Modified Damping Model of Vector Form Intrinsic Finite Element Method For High-Speed Spiral Bevel Gear Dynamic Characteristics AnalysisDocument11 pagesA Modified Damping Model of Vector Form Intrinsic Finite Element Method For High-Speed Spiral Bevel Gear Dynamic Characteristics AnalysisNgoc Thang NguyenNo ratings yet
- Modelo Teorico Rodamientos VibracionDocument13 pagesModelo Teorico Rodamientos VibracionGIULLIANA RIVAS ACURIONo ratings yet
- Monolithic Parallel Linear Compliant Mechanism For Two Axes Ultraprecision Linear MotionDocument8 pagesMonolithic Parallel Linear Compliant Mechanism For Two Axes Ultraprecision Linear Motionmaulikshah_23No ratings yet
- Hybrid Actuator For Robot ManipulatorsDocument7 pagesHybrid Actuator For Robot Manipulatorsgurivi201No ratings yet
- A Parametric Study of Spur Gear Dynamics PDFDocument88 pagesA Parametric Study of Spur Gear Dynamics PDFCan CemreNo ratings yet
- An Acceleration-Based State Observer For Robot Manipulators With Elastic JointsDocument7 pagesAn Acceleration-Based State Observer For Robot Manipulators With Elastic JointsJyotirekha PatiNo ratings yet
- 1 s2.0 S0022460X15007385 Main PDFDocument21 pages1 s2.0 S0022460X15007385 Main PDFarviandyNo ratings yet
- An Improved Particle Swarm Optimization AlgorithmDocument11 pagesAn Improved Particle Swarm Optimization AlgorithmOussama AkrmiNo ratings yet
- Multilink 5 LinksDocument18 pagesMultilink 5 LinkstotyNo ratings yet
- Reciprocating: Slider-Crank Mechanism, Arrangement of Mechanical PartsDocument3 pagesReciprocating: Slider-Crank Mechanism, Arrangement of Mechanical PartsHanzlah NaseerNo ratings yet
- An Experimental Web Tension Control System: System Set-Up: Giannoccaro, N.I. Oishi, K. & Sakamoto, TDocument0 pagesAn Experimental Web Tension Control System: System Set-Up: Giannoccaro, N.I. Oishi, K. & Sakamoto, TSheik HassanNo ratings yet
- Literature Review: Four-Bar Linkage or Simply A 4-Bar or Four-Bar Is The Simplest Movable Linkage. ItDocument16 pagesLiterature Review: Four-Bar Linkage or Simply A 4-Bar or Four-Bar Is The Simplest Movable Linkage. It17-3E3 DEEPU MISHRA Mr.No ratings yet
- ClosechainDocument15 pagesClosechainQuyết Nguyễn CôngNo ratings yet
- 2014 ArticleDocument11 pages2014 ArticleJoël NoudjeuNo ratings yet
- Literature ReviewDocument11 pagesLiterature ReviewTalha YousufNo ratings yet
- A Method To Determine The Static Load Distribution in A Chain DriveDocument7 pagesA Method To Determine The Static Load Distribution in A Chain DriveRodrigo MarinNo ratings yet
- Heidari 2018Document11 pagesHeidari 2018Zaidi IsmailNo ratings yet
- Article1380893891 - Zhang Et AlDocument17 pagesArticle1380893891 - Zhang Et AlmghgolNo ratings yet
- Multi-Body Dynamics and Vibration AnalysisDocument13 pagesMulti-Body Dynamics and Vibration AnalysisGogyNo ratings yet
- 1 s2.0 S0888327022005337 MainDocument21 pages1 s2.0 S0888327022005337 MainjaychengNo ratings yet
- Using Winkler BeamDocument10 pagesUsing Winkler Beamgolddust2012No ratings yet
- Design and Control of A Directly-Driven Bond Head For Thermosonic BondingDocument11 pagesDesign and Control of A Directly-Driven Bond Head For Thermosonic BondingRockerss RockerssNo ratings yet
- Evaluation of Optimum Profile ModificatiDocument19 pagesEvaluation of Optimum Profile ModificatiAlan D'CruzNo ratings yet
- ADP Applications: Gates Is A Global Leader in OE System DesignDocument6 pagesADP Applications: Gates Is A Global Leader in OE System DesignKESAVANNo ratings yet
- GM 4350M-2004 部件涂层性能要求Document7 pagesGM 4350M-2004 部件涂层性能要求KESAVANNo ratings yet
- утд20 ru enDocument106 pagesутд20 ru enKESAVANNo ratings yet
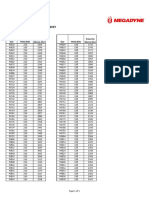
- Megadyne Poly V Pricing - 07.02.2019Document9 pagesMegadyne Poly V Pricing - 07.02.2019KESAVANNo ratings yet
- Two-Motor, Two-Axle Traction System For Full Electric VehicleDocument15 pagesTwo-Motor, Two-Axle Traction System For Full Electric VehicleKESAVANNo ratings yet
- Designed, Engineered and Produced by The Original Equipment ManufacturerDocument5 pagesDesigned, Engineered and Produced by The Original Equipment ManufacturerKESAVANNo ratings yet
- 2009 Balineras de Bola y Rodillo GMBDocument46 pages2009 Balineras de Bola y Rodillo GMBKESAVANNo ratings yet
- Megadyne Poly V Pricing - 07.02.2019Document9 pagesMegadyne Poly V Pricing - 07.02.2019KESAVANNo ratings yet
- Innovative Trends in The Automotive IndustryDocument5 pagesInnovative Trends in The Automotive IndustryKESAVANNo ratings yet
- Pre-Sumbission Version This Is A Pre-Review Version of The ManuscriptDocument27 pagesPre-Sumbission Version This Is A Pre-Review Version of The ManuscriptKESAVANNo ratings yet
- 1212201672826PMDraft AIS-137 Part 3 D0 PDocument247 pages1212201672826PMDraft AIS-137 Part 3 D0 PKESAVANNo ratings yet
- 11 - Chapter 4Document12 pages11 - Chapter 4KESAVANNo ratings yet
- 《Journal of Vibration and Acoustics》One-way Clutch and belt bending stiffnessDocument14 pages《Journal of Vibration and Acoustics》One-way Clutch and belt bending stiffnessKESAVANNo ratings yet
- SafeGrid Tutorial How To Perform A Simple Earthing DesignDocument10 pagesSafeGrid Tutorial How To Perform A Simple Earthing DesignAnwesh Kumar MaddikuntaNo ratings yet
- Client Name: Well, Max Birthdate: AGE: 7 Years, 8 Months School: Grade: 1 Dates of Assessment: July, 2011 Date of Report: Assessed By: FlamesDocument10 pagesClient Name: Well, Max Birthdate: AGE: 7 Years, 8 Months School: Grade: 1 Dates of Assessment: July, 2011 Date of Report: Assessed By: Flamesapi-160674927No ratings yet
- 2007-09-29 Every Soldier Is A SensorDocument5 pages2007-09-29 Every Soldier Is A SensorDozerMayneNo ratings yet
- Item Part No Location No - Available No. Used Remaining Min No. Required Reordered No Cost Per Item Total CostDocument1 pageItem Part No Location No - Available No. Used Remaining Min No. Required Reordered No Cost Per Item Total CostRockyNo ratings yet
- R Reference Manual Volume 1Document736 pagesR Reference Manual Volume 1PH1628No ratings yet
- Unit 4 The Narrative Approach To Assessment and Counseling: StructureDocument18 pagesUnit 4 The Narrative Approach To Assessment and Counseling: Structureshweta GNo ratings yet
- InfoDocument2 pagesInfofukinbobNo ratings yet
- Fallacies of Defective Induction 2Document29 pagesFallacies of Defective Induction 2Paul Romualdez Tan100% (1)
- CHE 110A Problem Set No. 2: Smith, Van Ness, Abbott, 2.3, Page 56Document2 pagesCHE 110A Problem Set No. 2: Smith, Van Ness, Abbott, 2.3, Page 56Karthika SNo ratings yet
- Kansas Academy of Science: Info/about/policies/terms - JSPDocument6 pagesKansas Academy of Science: Info/about/policies/terms - JSPKeily VilcarromeroNo ratings yet
- CSTP 1-6 Ehlers 7Document39 pagesCSTP 1-6 Ehlers 7api-622333255No ratings yet
- Tacha's ReusmeDocument2 pagesTacha's ReusmeJames HamptonNo ratings yet
- CS198 Programming Assignment 2Document4 pagesCS198 Programming Assignment 2shellnexusNo ratings yet
- A Practical Guide To Free-Energy' DevicesDocument73 pagesA Practical Guide To Free-Energy' DevicesJoe Seserman100% (1)
- Al Boury Oil FieldDocument11 pagesAl Boury Oil FieldSherif MohammedNo ratings yet
- Revised Copy of Wartsila 18V220SG ProjectDocument3 pagesRevised Copy of Wartsila 18V220SG ProjectZohaib AlamNo ratings yet
- 937 Soldering Station: Setting The TemperatureDocument1 page937 Soldering Station: Setting The TemperatureSuriawati NordinNo ratings yet
- Higher Eng Maths 9th Ed 2021 Solutions ChapterDocument17 pagesHigher Eng Maths 9th Ed 2021 Solutions ChapterAubrey JosephNo ratings yet
- Oilfield Products - Valves & Wellheads: YyycwuvtcnkcprkrgnkpgxcnxgeqocwDocument48 pagesOilfield Products - Valves & Wellheads: Yyycwuvtcnkcprkrgnkpgxcnxgeqocwjhonny barrantesNo ratings yet
- Benstones Instruments IMPAQ ELITE 4 CanalesDocument8 pagesBenstones Instruments IMPAQ ELITE 4 CanalesmauriciojjNo ratings yet
- 21st Century Skills PaperDocument8 pages21st Century Skills PaperemilyraleyNo ratings yet
- What I Need To KnowDocument16 pagesWhat I Need To Knowgirlie paraisoNo ratings yet
- Demography Is The: Statistical Study Human PopulationDocument17 pagesDemography Is The: Statistical Study Human PopulationYash SejpalNo ratings yet
- Performance: Task in Math 8 House Floor PlanDocument10 pagesPerformance: Task in Math 8 House Floor PlanJoshua Emmanuel LedesmaNo ratings yet
- Learning Activity Sheet Computing Probabilities and Percentiles Under The Normal CurveDocument5 pagesLearning Activity Sheet Computing Probabilities and Percentiles Under The Normal CurveJhon Loyd Nidea Pucio100% (1)
- Futures - Tiempos Futuros BBDocument10 pagesFutures - Tiempos Futuros BBLuz DuranteNo ratings yet
- List Product YellowDocument10 pagesList Product YellowfitriNo ratings yet
- Exercise Oracle Forms 6i TrainingDocument5 pagesExercise Oracle Forms 6i TrainingFarooq Shahid100% (1)