Download as docx, pdf, or txt
You might also like
- Airbus Flight Control Laws: The Reconfiguration LawsFrom EverandAirbus Flight Control Laws: The Reconfiguration LawsRating: 4.5 out of 5 stars4.5/5 (16)
- Duchess Study GuideDocument14 pagesDuchess Study GuideAdam Nasr El Din50% (2)
- CMP Final Draft FuelDocument33 pagesCMP Final Draft Fuelapi-594648232No ratings yet
- GK HV CurveDocument8 pagesGK HV CurvegkNo ratings yet
- Helicopter Aerodynamics by Paul CantrellDocument57 pagesHelicopter Aerodynamics by Paul CantrellAbhiram100% (2)
- AP YMCA Level 3 Mock Paper - Sports MassageDocument11 pagesAP YMCA Level 3 Mock Paper - Sports Massagemy name0% (1)
- Final Project On Outsourcing in IndiaDocument23 pagesFinal Project On Outsourcing in IndiaLaxman Zagge100% (3)
- ASE430 AssingmentDocument7 pagesASE430 AssingmentRajat KrishnaNo ratings yet
- ASE430 AssingmentDocument7 pagesASE430 AssingmentRajat KrishnaNo ratings yet
- ASE430 AssingmentDocument7 pagesASE430 AssingmentRajat KrishnaNo ratings yet
- Auto RotationDocument4 pagesAuto RotationCarlos Castillo Palma100% (1)
- Swash PlateDocument14 pagesSwash PlateSwmdwn Basumatary100% (1)
- Aerodynamics of AutorotationDocument8 pagesAerodynamics of Autorotationzippiesdrainage100% (1)
- PropellersDocument13 pagesPropellerstatomhNo ratings yet
- Helicopter AutorotationDocument4 pagesHelicopter AutorotationDumitru Enin100% (1)
- What Is Dissymmetry of LiftDocument4 pagesWhat Is Dissymmetry of LiftRon McIntyreNo ratings yet
- Gas Turbine Engine: Assignment 2Document9 pagesGas Turbine Engine: Assignment 2levitranNo ratings yet
- Ae 15707-Comprehension and Technical Seminar in Flight MechanicsDocument10 pagesAe 15707-Comprehension and Technical Seminar in Flight MechanicsGOWTHAMAN.DNo ratings yet
- The Compound Helicopter Configuration and TheDocument7 pagesThe Compound Helicopter Configuration and Theghoopp76No ratings yet
- Gas Turbine Engine: Assignment 2Document5 pagesGas Turbine Engine: Assignment 2levitranNo ratings yet
- LTEDocument4 pagesLTEzippiesdrainageNo ratings yet
- Stall (Flight) : For Other Uses, SeeDocument14 pagesStall (Flight) : For Other Uses, SeeLu MengaoNo ratings yet
- 4 Propeller FundamentalsDocument16 pages4 Propeller FundamentalsRaul Deonarain100% (1)
- Ropeller Erodynamics: Propeller AerodynamicsDocument5 pagesRopeller Erodynamics: Propeller AerodynamicstarabhmallyNo ratings yet
- StallDocument14 pagesStallskhogtapurNo ratings yet
- For Other Uses, See: Stall (Flight)Document19 pagesFor Other Uses, See: Stall (Flight)Adeniran OluokunNo ratings yet
- Rotary Wing AerodynamicsDocument38 pagesRotary Wing Aerodynamicssushantreshma100% (1)
- How Can Helicopter Fly: GeneralDocument31 pagesHow Can Helicopter Fly: GeneralBrandon Red BaronNo ratings yet
- FligtDocument11 pagesFligt20AE040 RajkumarNo ratings yet
- Propeller Aerodynamics PDFDocument11 pagesPropeller Aerodynamics PDFMaurizio Bernasconi100% (2)
- Lift and DragDocument11 pagesLift and DragCein Aren AlfonNo ratings yet
- Helicopter's Flying MechanismDocument23 pagesHelicopter's Flying MechanismRoxcyyyy100% (1)
- Aerodynamics: Lift and DragDocument4 pagesAerodynamics: Lift and DragJuly TadeNo ratings yet
- Aerodynamics of A Rotary Wing Type AircraftDocument37 pagesAerodynamics of A Rotary Wing Type AircraftDarshak Bhuptani100% (1)
- Basic Propeller PrinciplesDocument7 pagesBasic Propeller Principlesmgskumar100% (1)
- Module 11ADocument286 pagesModule 11AMak Briz100% (11)
- Aerodynamics of Helicopter. PPT PDFDocument37 pagesAerodynamics of Helicopter. PPT PDFsreekanth100% (1)
- Helicopter Assignment 2Document8 pagesHelicopter Assignment 2Johnzen Kim BaluyotNo ratings yet
- 9 RollingDynamicsDocument10 pages9 RollingDynamicsSonia YadavNo ratings yet
- IA0160 PP10 Helicopter Flight-PhenomenaDocument19 pagesIA0160 PP10 Helicopter Flight-PhenomenaAndres Felipe Valek EstradaNo ratings yet
- Use of Rudder On A300-600 & A310Document4 pagesUse of Rudder On A300-600 & A310fakernevernoNo ratings yet
- Basic Aviation Safety 2013Document38 pagesBasic Aviation Safety 2013Jannys Kharisma Asyam NashrullahNo ratings yet
- Propeller Control Tutorial v3Document3 pagesPropeller Control Tutorial v3Gibson MwasiNo ratings yet
- Flight Dynamics ModelerDocument3 pagesFlight Dynamics ModelerAlex NgNo ratings yet
- Notes Helicopter AerodynamicsDocument44 pagesNotes Helicopter Aerodynamicsyenikesuryaprakash100% (2)
- The How and Why of FlapsDocument8 pagesThe How and Why of FlapsKHANG NGUYỄN HỒ NGUYÊNNo ratings yet
- Blade TwistDocument4 pagesBlade TwistJabez RichardsNo ratings yet
- Unit 2Document64 pagesUnit 2Jabez RichardsNo ratings yet
- The Physics of FlightDocument30 pagesThe Physics of Flightkothapalli21No ratings yet
- Aircraft Flight Control SystemDocument25 pagesAircraft Flight Control Systemthilina jayasooriyaNo ratings yet
- External Flow-Drag Lift - SU Lift ForceDocument5 pagesExternal Flow-Drag Lift - SU Lift ForceSaad SalahuddinNo ratings yet
- Basic Helicopter HandbookDocument136 pagesBasic Helicopter Handbookcarl03100% (1)
- Aircraft Brake SystemDocument3 pagesAircraft Brake SystemYadana1No ratings yet
- Which Control The Pitch Angle of The Tail Rotor Blades: by Pressing On The Right Pedal, The Pitch IsDocument5 pagesWhich Control The Pitch Angle of The Tail Rotor Blades: by Pressing On The Right Pedal, The Pitch IsAina AfifahNo ratings yet
- FlapsDocument7 pagesFlapsamiino100% (1)
- Aircraft 1Document13 pagesAircraft 1J.a. RumiNo ratings yet
- The Importance of Proper Rotation TechniqueDocument2 pagesThe Importance of Proper Rotation Techniqueaske7sp8055No ratings yet
- A330 Normal Law: Putting Fly-by-Wire Into PerspectiveFrom EverandA330 Normal Law: Putting Fly-by-Wire Into PerspectiveRating: 5 out of 5 stars5/5 (2)
- The Samora Machel and Helderberg Conspiracies and Other South African Air AccidentsFrom EverandThe Samora Machel and Helderberg Conspiracies and Other South African Air AccidentsNo ratings yet
- Introduction to Fly-by-Wire Flight Control Systems: The professional pilot’s guide to understanding modern aircraft controlsFrom EverandIntroduction to Fly-by-Wire Flight Control Systems: The professional pilot’s guide to understanding modern aircraft controlsNo ratings yet
- 7 Effective Steps To Solve Case StudyDocument3 pages7 Effective Steps To Solve Case StudyRajat KrishnaNo ratings yet
- Ethics in MarketingDocument8 pagesEthics in MarketingRajat KrishnaNo ratings yet
- Provision For Alternate Dispute Resolution: The New ActDocument3 pagesProvision For Alternate Dispute Resolution: The New ActRajat KrishnaNo ratings yet
- ASE430 AssingmentDocument7 pagesASE430 AssingmentRajat KrishnaNo ratings yet
- Impact of Covid-19 On Family Grocery Spending BehaviourDocument5 pagesImpact of Covid-19 On Family Grocery Spending BehaviourRajat KrishnaNo ratings yet
- ASE430 AssingmentDocument7 pagesASE430 AssingmentRajat KrishnaNo ratings yet
- A2071606164 - 24921 - 17 - 2020 - Consumer Protection Act, 2019Document5 pagesA2071606164 - 24921 - 17 - 2020 - Consumer Protection Act, 2019Rajat KrishnaNo ratings yet
- ASE430 AssingmentDocument7 pagesASE430 AssingmentRajat KrishnaNo ratings yet
- Business Ethics: Assignment Topic: Impact of Coronavirus Lockdown in IndiaDocument6 pagesBusiness Ethics: Assignment Topic: Impact of Coronavirus Lockdown in IndiaRajat KrishnaNo ratings yet
- MeetingsDocument3 pagesMeetingsTom SchmitNo ratings yet
- 102 - SCO8048A-Alert - Fixings-FinalDocument3 pages102 - SCO8048A-Alert - Fixings-FinalO SNo ratings yet
- Case Shaping Future Business Leaders 9 June 2016Document7 pagesCase Shaping Future Business Leaders 9 June 2016Alka AggarwalNo ratings yet
- PT0-101 NetworkArmyDocument84 pagesPT0-101 NetworkArmyMohammad Malek KhataeiNo ratings yet
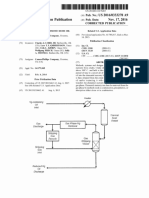
- Patent Application Publication: (19) United StatesDocument13 pagesPatent Application Publication: (19) United StatesPratamap OdelNo ratings yet
- Midterm Exam in P.E 1Document3 pagesMidterm Exam in P.E 1Condrad Casido0% (1)
- Sat Sankalp EnglishDocument2 pagesSat Sankalp Englishrohan100% (1)
- Concurrent EngineeringDocument16 pagesConcurrent EngineeringAnusha MandavaNo ratings yet
- Practical Training ReportDocument6 pagesPractical Training ReportGorishsharmaNo ratings yet
- Manual For Oil ExtractorDocument2 pagesManual For Oil ExtractorAldrin MechNo ratings yet
- CW DramaDocument31 pagesCW DramaBurning RoseNo ratings yet
- The Efficiency of Electrocoagulation in Treating Wastewater From A Dairy Industry, Part I: Iron ElectrodesDocument8 pagesThe Efficiency of Electrocoagulation in Treating Wastewater From A Dairy Industry, Part I: Iron ElectrodesazerfazNo ratings yet
- Annual Report 2018 04 BothSN PDFDocument168 pagesAnnual Report 2018 04 BothSN PDFjoenediath9345No ratings yet
- ASTM D6905 - 03 Standard Test Method For Impact Flexibility of Organic CoatingsDocument3 pagesASTM D6905 - 03 Standard Test Method For Impact Flexibility of Organic CoatingsCemalOlgunÇağlayan0% (1)
- Difference of Quantitative Research and Qualitative ResearchDocument1 pageDifference of Quantitative Research and Qualitative Researchmhel vianney bariquitNo ratings yet
- Fred Review 16Document8 pagesFred Review 16Justin HsuNo ratings yet
- Shadow Lord CampsDocument3 pagesShadow Lord CampsGnomeMadeIon100% (1)
- Clarinet GroveDocument38 pagesClarinet GroveLaMusica IlMio:nomeNo ratings yet
- Woodrats and Cholla-Dependence of A Small MammalDocument5 pagesWoodrats and Cholla-Dependence of A Small MammalDylan PeroNo ratings yet
- CAOAppraisalReport PanamaCanalExpansion C I R9 Y12 F159 ENGDocument19 pagesCAOAppraisalReport PanamaCanalExpansion C I R9 Y12 F159 ENGSumit SethNo ratings yet
- How To Sell Trend Micro Vision One 2021Document12 pagesHow To Sell Trend Micro Vision One 2021abbekNo ratings yet
- Group-8 RRL Bes-107Document16 pagesGroup-8 RRL Bes-107bj30No ratings yet
- Zohdy, Eaton & Mabey - Application of Surface Geophysics To Ground-Water Investigations - USGSDocument63 pagesZohdy, Eaton & Mabey - Application of Surface Geophysics To Ground-Water Investigations - USGSSalman AkbarNo ratings yet
- Which Functor Is The Projective Line?Document16 pagesWhich Functor Is The Projective Line?flores3831_814460512No ratings yet
- Coenzymes and Prosthetic GroupsDocument35 pagesCoenzymes and Prosthetic Groupsrishigangwar2No ratings yet
- HuaweiDocument84 pagesHuaweiJainiti PrasadNo ratings yet
- Protections Study SDP1-1: Sur Desalination - Oman (SDP1-1)Document27 pagesProtections Study SDP1-1: Sur Desalination - Oman (SDP1-1)Ayoub CherkaouiNo ratings yet