Download as pdf or txt
You might also like
- Chapter - 1 - Digital - Systems - and - Binary - Numbers EE228 15-16Document81 pagesChapter - 1 - Digital - Systems - and - Binary - Numbers EE228 15-16mohamed hemdanNo ratings yet
- Manual Furadeira Radial Rd3050x16Document56 pagesManual Furadeira Radial Rd3050x16rbocca123No ratings yet
- Chap 1 FundamentalsDocument30 pagesChap 1 FundamentalssamuelNo ratings yet
- L01 03Document85 pagesL01 03eadaladarenuNo ratings yet
- CE-101 Lec 1a IntroductionDocument14 pagesCE-101 Lec 1a IntroductionRaquib AhsanNo ratings yet
- Basic Mechanics-167 Unit1introDocument30 pagesBasic Mechanics-167 Unit1intronewtoneugene344No ratings yet
- Physic 1 - Lecture 0Document17 pagesPhysic 1 - Lecture 010223035No ratings yet
- DOM Course 20 21 1Document32 pagesDOM Course 20 21 1emreasker22No ratings yet
- EnotesDocument30 pagesEnotesgouthamk5151No ratings yet
- Lecture-1 EM Dr. TahminaDocument100 pagesLecture-1 EM Dr. TahminaAhmed SamiraNo ratings yet
- Engineering Dynamics Lecture 1Document33 pagesEngineering Dynamics Lecture 1Anokha LadlaNo ratings yet
- Lecture 1 (Chapter 1)Document21 pagesLecture 1 (Chapter 1)Adam SurtiNo ratings yet
- Engineering Mechanics NotesDocument44 pagesEngineering Mechanics NotesLawrence LubangaNo ratings yet
- Module 1Document14 pagesModule 1Madelar, Arc Francis C.No ratings yet
- MEE214 แผนการเรียนDocument3 pagesMEE214 แผนการเรียนT KongcharoenNo ratings yet
- MAE 241 - Lec1Document25 pagesMAE 241 - Lec1kostas.sierros9374No ratings yet
- Dr. Firas K. AL-Zuhairi E-Mail: 150009@uotechnology - Edu.iq: Engineering MechanicsDocument28 pagesDr. Firas K. AL-Zuhairi E-Mail: 150009@uotechnology - Edu.iq: Engineering Mechanicsحسين راشد عيسى كريمNo ratings yet
- LECTURE For Mechanical Engineer 1Document42 pagesLECTURE For Mechanical Engineer 1smuapnerNo ratings yet
- Mechanics Course OutlineDocument3 pagesMechanics Course Outliner241659aNo ratings yet
- AMT 3102 Module 01 Principles of StaticsDocument15 pagesAMT 3102 Module 01 Principles of StaticsAlt YtaccNo ratings yet
- Lesson 01.0Document10 pagesLesson 01.0Patrick Jamiel TorresNo ratings yet
- Mechanics of Machines LEC # 01Document14 pagesMechanics of Machines LEC # 01Tarvesh KumarNo ratings yet
- Fundamentals of Engineering MechanicsDocument19 pagesFundamentals of Engineering MechanicsayingbaNo ratings yet
- Overviews of StaticsDocument70 pagesOverviews of StaticsJacous Wcy100% (1)
- Dynamics Module 1Document8 pagesDynamics Module 1Jed IsidtoNo ratings yet
- Dynamics StudentDocument19 pagesDynamics StudentRioNo ratings yet
- Lecture 1Document22 pagesLecture 1نصرت سعد نصرتNo ratings yet
- ATec 2048 Student Version-1Document47 pagesATec 2048 Student Version-1andualem nigussieNo ratings yet
- Best Unit 1Document254 pagesBest Unit 1Anshuman GhughutiyalNo ratings yet
- Introduction To Dynamics: Chapter ObjectivesDocument6 pagesIntroduction To Dynamics: Chapter ObjectivesTất ThànhNo ratings yet
- Basic Concepts of Engineering MechanicsDocument19 pagesBasic Concepts of Engineering MechanicsayingbaNo ratings yet
- Engineering MechanicsDocument112 pagesEngineering Mechanicsch pavan kumarNo ratings yet
- General Physics Ourse Outline FDocument5 pagesGeneral Physics Ourse Outline FMerawi TilahunNo ratings yet
- Applied MechanicsDocument13 pagesApplied MechanicsAayush JhaNo ratings yet
- Chapter 1 Basic of StaticsDocument42 pagesChapter 1 Basic of StaticsHabtie WalleNo ratings yet
- PH3151 Engineering Physics UNIT 1-30Document30 pagesPH3151 Engineering Physics UNIT 1-30knowledge2intelligenceNo ratings yet
- Summarized Notes of Engineering Mechanics OneDocument64 pagesSummarized Notes of Engineering Mechanics OneRogers BenjaminNo ratings yet
- Lecture Mechanics For Engineering StaticDocument83 pagesLecture Mechanics For Engineering StaticAli AlaamiryNo ratings yet
- Debre Markos University: College of Natural and Computational Science Department of PhysicsDocument4 pagesDebre Markos University: College of Natural and Computational Science Department of PhysicsYesgat enawgawNo ratings yet
- Applied Mechanics: Farooq Mustafa Joyia Department of Technology University of LahoreDocument82 pagesApplied Mechanics: Farooq Mustafa Joyia Department of Technology University of LahoreUmer RazaqNo ratings yet
- Engineering Mechanics: Distinction Between Branches of PhysicsDocument4 pagesEngineering Mechanics: Distinction Between Branches of PhysicsVenkatesan DevendranNo ratings yet
- L - 1.1-1.6 General PrinciplesDocument19 pagesL - 1.1-1.6 General Principleschess turkeyNo ratings yet
- Biliran Province State UniversityDocument7 pagesBiliran Province State UniversityKyle Christian CeprezNo ratings yet
- Statics CH 01 MamadouKabirouTouréDocument89 pagesStatics CH 01 MamadouKabirouTourézeynab RassoulNo ratings yet
- ME 3507: Theory of Machines: Dr. Faraz JunejoDocument45 pagesME 3507: Theory of Machines: Dr. Faraz JunejoArsal AbbasNo ratings yet
- PDF Dynamics of MACHINERY PDFDocument469 pagesPDF Dynamics of MACHINERY PDFFarhan Ali RabbaniNo ratings yet
- Module 1 - Basic Kinematics NSCI02Document15 pagesModule 1 - Basic Kinematics NSCI02micoNo ratings yet
- Engineering Mechanics For Civil Engr.Document112 pagesEngineering Mechanics For Civil Engr.Clara Ogladit100% (1)
- General Physics Ourse Outline Final GOLD MARKDocument4 pagesGeneral Physics Ourse Outline Final GOLD MARKNahom AmareNo ratings yet
- PRPC10 AM Rigid Body MechanicsDocument72 pagesPRPC10 AM Rigid Body MechanicsP. M. ISAI VISAAHANNo ratings yet
- Lecture 1Document37 pagesLecture 1Ayush SinghNo ratings yet
- EM Lec. 01 Chapter-1Document23 pagesEM Lec. 01 Chapter-1Jack BravoNo ratings yet
- Unit I - Introduction To Engineering MechanicsDocument253 pagesUnit I - Introduction To Engineering MechanicsdncpzcnwrhNo ratings yet
- General Physics Course Outline Final GOLD MARKDocument4 pagesGeneral Physics Course Outline Final GOLD MARKYordanos MekonnenNo ratings yet
- Engineering Is The Application of Mathematics, Empirical Evidence and Scientific, EconomicDocument5 pagesEngineering Is The Application of Mathematics, Empirical Evidence and Scientific, EconomicKylle BedisNo ratings yet
- Unit 1 Mechanical Engineering and Force VectorDocument32 pagesUnit 1 Mechanical Engineering and Force VectorNÏALNo ratings yet
- 1.lecture 1Document33 pages1.lecture 1JIGME TENZINNo ratings yet
- 300 PDFDocument3 pages300 PDFmohamed hemdanNo ratings yet
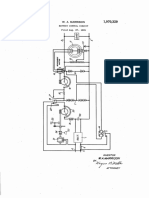
- W. A. Marrison: WvewtorDocument5 pagesW. A. Marrison: Wvewtormohamed hemdanNo ratings yet
- 2,710,376 June 7, 1955: Magnetic Armature Mirror For GalvanometersDocument3 pages2,710,376 June 7, 1955: Magnetic Armature Mirror For Galvanometersmohamed hemdanNo ratings yet
- United States Patent: Y Reflected BeamDocument5 pagesUnited States Patent: Y Reflected Beammohamed hemdanNo ratings yet
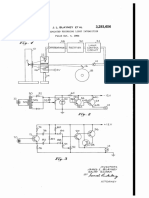
- ° 4-See 4 4.e.: Dec. 20, 1966 J. L. Bayney E.T A. 3,293,656Document4 pages° 4-See 4 4.e.: Dec. 20, 1966 J. L. Bayney E.T A. 3,293,656mohamed hemdanNo ratings yet
- Profiles in Cardiology: Willem Einthoven-The Father of ElectrocardiographyDocument3 pagesProfiles in Cardiology: Willem Einthoven-The Father of Electrocardiographymohamed hemdanNo ratings yet
- ZZZZZZZZZZZ) ??: A. M. CurtisDocument4 pagesZZZZZZZZZZZ) ??: A. M. Curtismohamed hemdanNo ratings yet
- No. 323,203, - Patented July 28, 1885,: R. J. PrattDocument4 pagesNo. 323,203, - Patented July 28, 1885,: R. J. Prattmohamed hemdanNo ratings yet
- "Jr5%Avu: 29 N 2zzzzzakazDocument4 pages"Jr5%Avu: 29 N 2zzzzzakazmohamed hemdanNo ratings yet
- March 17, 1931. H. Mann 1,797,007: Filled April LL, 930Document4 pagesMarch 17, 1931. H. Mann 1,797,007: Filled April LL, 930mohamed hemdanNo ratings yet
- 250-201 AU 252 EX Cross Reference Examir: Aug. 22, 1944. G. F. Gardner 2,356,579Document3 pages250-201 AU 252 EX Cross Reference Examir: Aug. 22, 1944. G. F. Gardner 2,356,579mohamed hemdanNo ratings yet
- 6ave. E: Sept. 13, 1966 F. Rompelen Etal 3,273,061Document4 pages6ave. E: Sept. 13, 1966 F. Rompelen Etal 3,273,061mohamed hemdanNo ratings yet
- Computer Monitor: ReferencesDocument4 pagesComputer Monitor: Referencesmohamed hemdan100% (1)
- No. 792,843, PATENTED JUNE 20, 1905, Galwanometer.: E, F, NorthrupDocument6 pagesNo. 792,843, PATENTED JUNE 20, 1905, Galwanometer.: E, F, Northrupmohamed hemdanNo ratings yet
- ". It Is: Oct. 11, 1955 W. A. Power 2,720,620Document4 pages". It Is: Oct. 11, 1955 W. A. Power 2,720,620mohamed hemdanNo ratings yet
- Voltage Amplifier: Prepared byDocument7 pagesVoltage Amplifier: Prepared bymohamed hemdanNo ratings yet
- Suspension Galvanometer Filed Oct. 19, 1953: J. R. AvsDocument3 pagesSuspension Galvanometer Filed Oct. 19, 1953: J. R. Avsmohamed hemdanNo ratings yet
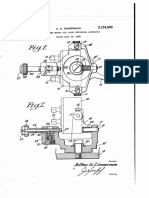
- April 11, 1939. A. G. Zimmerman 2,154,080: Filed June 18, 1938Document3 pagesApril 11, 1939. A. G. Zimmerman 2,154,080: Filed June 18, 1938mohamed hemdanNo ratings yet
- Galvanometer Coil and Method of Making Same: A. D. RichardsonDocument5 pagesGalvanometer Coil and Method of Making Same: A. D. Richardsonmohamed hemdanNo ratings yet
- Writing A Scientific Report: 2.1 TitleDocument14 pagesWriting A Scientific Report: 2.1 Titlemohamed hemdanNo ratings yet
- Lecture 2 Mobility of Mechanisms Dr. Othman HassanDocument16 pagesLecture 2 Mobility of Mechanisms Dr. Othman Hassanmohamed hemdanNo ratings yet
- Us2237552 PDFDocument4 pagesUs2237552 PDFmohamed hemdanNo ratings yet
- Centenary of Tele-Electrocardiography and TelephonocardiographyDocument3 pagesCentenary of Tele-Electrocardiography and Telephonocardiographymohamed hemdanNo ratings yet
- GalvanometerDocument6 pagesGalvanometermohamed hemdanNo ratings yet
- Records (Structs)Document29 pagesRecords (Structs)mohamed hemdan100% (1)
- Einthoven's String Galvanometer: Historical PerspectivesDocument5 pagesEinthoven's String Galvanometer: Historical Perspectivesmohamed hemdanNo ratings yet
- GalvanometerDocument11 pagesGalvanometermohamed hemdanNo ratings yet
- Lecture 16 Gears and Gear Trains (Continued) Dr. Othman HassanDocument9 pagesLecture 16 Gears and Gear Trains (Continued) Dr. Othman Hassanmohamed hemdanNo ratings yet
- Machine Theory عربيDocument695 pagesMachine Theory عربيahlamNo ratings yet
- Solid Edge Mechanism ExerciseDocument9 pagesSolid Edge Mechanism Exercisepatcad771No ratings yet
- Theory of Machines References 1 MechanicDocument25 pagesTheory of Machines References 1 MechanicMd. Zillur RahmanNo ratings yet
- Smart Steering SystemDocument8 pagesSmart Steering SystemShahzad Rasheed100% (1)
- Catia Tutor - DMA - Use of Skeleton ModelingDocument8 pagesCatia Tutor - DMA - Use of Skeleton ModelingDanilo CataniaNo ratings yet
- Gate Theory of MachinesDocument53 pagesGate Theory of MachinesAMAL SAHAJANNo ratings yet
- Department of Mechanical Engineering Dynamics Laboratory Manual Iii Year / V SemesterDocument42 pagesDepartment of Mechanical Engineering Dynamics Laboratory Manual Iii Year / V SemesterSathrudhan ChoudharyNo ratings yet
- Design and Development of An Intelligent Rover For Mars Exploration (Updated)Document12 pagesDesign and Development of An Intelligent Rover For Mars Exploration (Updated)jubaer ahmedNo ratings yet
- Box Transport MDocument59 pagesBox Transport MJeevan Landge PatilNo ratings yet
- Planar Mechanisms 1Document6 pagesPlanar Mechanisms 1Aryan Rai0% (1)
- I Unit Lecture NotesDocument51 pagesI Unit Lecture Notesgsuresh40No ratings yet
- Tutorial Sheet-1Document6 pagesTutorial Sheet-1Rakesh KumarNo ratings yet
- Clutches Brakes and DynamometersDocument62 pagesClutches Brakes and DynamometersIrfan Shaikh50% (2)
- CamDocument30 pagesCamShangarab BeraNo ratings yet
- Design of Mechanical Variable Valve ActuatorDocument10 pagesDesign of Mechanical Variable Valve ActuatoriocsachinNo ratings yet
- KOM Final 13 May 2020Document5 pagesKOM Final 13 May 2020Nilesh GhugeNo ratings yet
- Kinematic of MechanismDocument12 pagesKinematic of MechanismFennyFebrinaNurlitaSariNo ratings yet
- Design and Fabrication of Motorized Hydraulic JackDocument5 pagesDesign and Fabrication of Motorized Hydraulic JackAmar AglaveNo ratings yet
- Design & Modelling of Fluid Power SystemsDocument34 pagesDesign & Modelling of Fluid Power SystemshammermfgNo ratings yet
- MEEN 201101004 LAB 07 Adnan Rasheed...Document8 pagesMEEN 201101004 LAB 07 Adnan Rasheed...Zohaib Arif MehmoodNo ratings yet
- ME3491 Course PlanDocument9 pagesME3491 Course Planmanoj1316kumar_63152No ratings yet
- Design and Fabrication of Elliptical TrammelsDocument14 pagesDesign and Fabrication of Elliptical TrammelsRagavan SNo ratings yet
- SpatialIntro PDFDocument29 pagesSpatialIntro PDFchiranjeeviNo ratings yet
- Me 6511 Dynamics LaboratoryDocument58 pagesMe 6511 Dynamics Laboratorymeckup123No ratings yet
- Dynamics and Control of Robotic Systems CH01Document9 pagesDynamics and Control of Robotic Systems CH01Samo apkNo ratings yet
- Design of An Ackermann Type Steering Mechanism: ArticleDocument15 pagesDesign of An Ackermann Type Steering Mechanism: ArticleKaasamHarishKumarNo ratings yet
- MAK4462 Machine - Tools Lecture - Notes 3Document126 pagesMAK4462 Machine - Tools Lecture - Notes 3muhammet çalımNo ratings yet
- Planar Robot KinematicsDocument7 pagesPlanar Robot Kinematicsasalifew belachewNo ratings yet
- Upright Drilling MachineDocument3 pagesUpright Drilling Machinevenkateshyadav2116100% (2)