Download as pdf or txt
You might also like
- List of Electronic Companies in Electronic City Phase of BangloreDocument4 pagesList of Electronic Companies in Electronic City Phase of BangloreVijay Dhanakodi67% (3)
- Panasonic Nv-gs50 ManualDocument16 pagesPanasonic Nv-gs50 Manualstotall100% (1)
- P091 084 Ioiscm Um 1105Document30 pagesP091 084 Ioiscm Um 1105Badescu Ionut100% (1)
- Data Sheet 6GK6023-0AS2.-.... : Transmission RateDocument7 pagesData Sheet 6GK6023-0AS2.-.... : Transmission Ratemehmet gezerNo ratings yet
- UMTS Speech Quality PrinciplesDocument65 pagesUMTS Speech Quality PrinciplesRikoArdi100% (3)
- 1 GHZ Multi-Dwelling Amplifier: Mda-100 Quick Start GuideDocument4 pages1 GHZ Multi-Dwelling Amplifier: Mda-100 Quick Start GuideMickynegrito TercerosNo ratings yet
- WTG 3 4 Psse ModelDocument20 pagesWTG 3 4 Psse ModelErsiAgo100% (1)
- Counter Ic With 2-Wire (I C-Bus) InterfaceDocument26 pagesCounter Ic With 2-Wire (I C-Bus) InterfaceCristo CrossNo ratings yet
- Dynamic Scheduling For A Turbo CDMA Receiver Using EXIT ChartsDocument5 pagesDynamic Scheduling For A Turbo CDMA Receiver Using EXIT ChartsDavid ShepherdNo ratings yet
- EEE312 Lab7 Spring2022Document6 pagesEEE312 Lab7 Spring2022bugra38785No ratings yet
- It6322 Scpi enDocument21 pagesIt6322 Scpi enAbu SyamilNo ratings yet
- Excitation System Model Data Sheets - Bus or Solid Fed SCR Bridge Excitation System Model (SCRX)Document1 pageExcitation System Model Data Sheets - Bus or Solid Fed SCR Bridge Excitation System Model (SCRX)asiancutieNo ratings yet
- Etteam Mini ENC28J60 Ethernet Board User GuideDocument6 pagesEtteam Mini ENC28J60 Ethernet Board User GuideBorut Zaletel100% (1)
- Differential Protection For Power TF With RET670Document14 pagesDifferential Protection For Power TF With RET670muhammad awais100% (1)
- Pin No. Pin Name Description Alternate FunctionDocument7 pagesPin No. Pin Name Description Alternate FunctionnareshhhhhNo ratings yet
- And8009/D Eclinps Plus Spice Modeling Kit: Objective Schematic InformationDocument68 pagesAnd8009/D Eclinps Plus Spice Modeling Kit: Objective Schematic InformationakteruzzamanNo ratings yet
- Programmable Micropower Operational Amplifier OP22: 1.0 ScopeDocument5 pagesProgrammable Micropower Operational Amplifier OP22: 1.0 ScopebiswarupchakrabortyNo ratings yet
- PTI-Compatible Exciter Models: Esac3ADocument32 pagesPTI-Compatible Exciter Models: Esac3Akarma yasserNo ratings yet
- PC Controlled Industrial MonitoringDocument31 pagesPC Controlled Industrial Monitoringtejash rajNo ratings yet
- 1200V Highspeed 3 Igbt: A New Igbt Family Optimized For High-Switching SpeedDocument16 pages1200V Highspeed 3 Igbt: A New Igbt Family Optimized For High-Switching SpeedJulianNo ratings yet
- Amplitude Shift Keying Modulator DemodulatorDocument10 pagesAmplitude Shift Keying Modulator DemodulatormitsalNo ratings yet
- CSDVCXVFDXGBVFDGFDFSDFGFDGFCGGCF Gjhghfgjjmgxjgdjpin No. Pin Name Description Alternate FunctionDocument8 pagesCSDVCXVFDXGBVFDGFDFSDFGFDGFCGGCF Gjhghfgjjmgxjgdjpin No. Pin Name Description Alternate FunctionnareshhhhhNo ratings yet
- Spice BasicsDocument14 pagesSpice BasicsLokendra Singh ShekhawatNo ratings yet
- EI5007W1D1Document10 pagesEI5007W1D1PyiAungNo ratings yet
- MC - CT2 - Scheme & KeyDocument4 pagesMC - CT2 - Scheme & Keyjinto0007No ratings yet
- Description Alternate FunctionDocument8 pagesDescription Alternate FunctionnareshhhhhNo ratings yet
- Unit 3 - VLSI Design - WWW - Rgpvnotes.inDocument12 pagesUnit 3 - VLSI Design - WWW - Rgpvnotes.inPushpendra gourNo ratings yet
- Extremely Accurate I C-Integrated RTC/TCXO/Crystal: General Description FeaturesDocument20 pagesExtremely Accurate I C-Integrated RTC/TCXO/Crystal: General Description FeaturesMilan Đokić100% (1)
- ST95040 ST95020, ST95010: 4K/2K/1K Serial SPI EEPROM With Positive Clock StrobeDocument19 pagesST95040 ST95020, ST95010: 4K/2K/1K Serial SPI EEPROM With Positive Clock StrobeCristian Esteban TamashiroNo ratings yet
- TL - 080 PDFDocument12 pagesTL - 080 PDFmichael luqueNo ratings yet
- Chapter 9 Microprocessor 8086Document57 pagesChapter 9 Microprocessor 8086shubhankar palNo ratings yet
- Description Alternate Function: SFDFDGFBGFDocument8 pagesDescription Alternate Function: SFDFDGFBGFnareshhhhhNo ratings yet
- Generator Model Data Sheets - Round Rotor Generator Model (GENROU)Document2 pagesGenerator Model Data Sheets - Round Rotor Generator Model (GENROU)asiancutieNo ratings yet
- Dept. of E&E, DSDNP, ShivamoggaDocument41 pagesDept. of E&E, DSDNP, Shivamoggaganesha saNo ratings yet
- CSDVCXVFDXGBVFDGFDFSDFGFDGFCGGCF Gjhghfgjjmgxjgdjpin No. Pin Name Description Alternate FunctionDocument8 pagesCSDVCXVFDXGBVFDGFDFSDFGFDGFCGGCF Gjhghfgjjmgxjgdjpin No. Pin Name Description Alternate FunctionnareshhhhhNo ratings yet
- 8 Kbit Serial SPI EEPROM With Positive Clock Strobe: Description Figure 1. Logic DiagramDocument16 pages8 Kbit Serial SPI EEPROM With Positive Clock Strobe: Description Figure 1. Logic DiagramJlb LBNo ratings yet
- Sdsafgdshgfvnbvnvnvnb: Description Alternate FunctionDocument8 pagesSdsafgdshgfvnbvnvnvnb: Description Alternate FunctionnareshhhhhNo ratings yet
- Pin No. Pin Name Description Alternate FunctionDocument6 pagesPin No. Pin Name Description Alternate FunctionnareshhhhhNo ratings yet
- EEE 51 Handout 2Document10 pagesEEE 51 Handout 2JC CalmaNo ratings yet
- VCV CXB CCNBFVBFCGXC VNVCN Vcnxdcvnxbcfhbxddsafcdsvfgsadgvbzfshfscxvbxbvxzsdsafgdshgf VNBVNVNVNBDocument8 pagesVCV CXB CCNBFVBFCGXC VNVCN Vcnxdcvnxbcfhbxddsafcdsvfgsadgvbzfshfscxvbxbvxzsdsafgdshgf VNBVNVNVNBnareshhhhhNo ratings yet
- Ap2114h-2 5TRG1Document28 pagesAp2114h-2 5TRG1HauQuyen G530HNo ratings yet
- 2발전기특성Model DataSheets PDFDocument181 pages2발전기특성Model DataSheets PDFJeziel JuárezNo ratings yet
- XC VNVCN Vcnxdcvnxbcfhbxddsafcdsvfgsadgvbzfshfscxvbxbvxzsdsafgdshgf VNBVNVNVNBDocument8 pagesXC VNVCN Vcnxdcvnxbcfhbxddsafcdsvfgsadgvbzfshfscxvbxbvxzsdsafgdshgf VNBVNVNVNBnareshhhhhNo ratings yet
- RDP Se - P1N85898Document4 pagesRDP Se - P1N85898Danilo SilvaNo ratings yet
- w1 01 Data Com ConceptsDocument14 pagesw1 01 Data Com Conceptsapi-26084493No ratings yet
- Igbt DriverDocument4 pagesIgbt DriverArmandinho CaveroNo ratings yet
- VBMB - 002-1Document56 pagesVBMB - 002-1Seethalakshmi VNo ratings yet
- Igbt PDFDocument16 pagesIgbt PDFPablo AllosiaNo ratings yet
- CSDVCXVFDXGBVFDGFDFSDFGFDGFCGGCF Gjhghfgjjmgxjgdjpin No. Pin Name Description Alternate FunctionDocument8 pagesCSDVCXVFDXGBVFDGFDFSDFGFDGFCGGCF Gjhghfgjjmgxjgdjpin No. Pin Name Description Alternate FunctionnareshhhhhNo ratings yet
- Lab 6Document4 pagesLab 6John MalgapoNo ratings yet
- JW ServicemanualDocument40 pagesJW ServicemanualLuis Alberto Garcia CaychoNo ratings yet
- Xddsafcdsvfgsadgvbzfshfscxvbxbvxzsdsafgdshgfvnbvnvnvn B: Descriptio N Alternate FunctionDocument8 pagesXddsafcdsvfgsadgvbzfshfscxvbxbvxzsdsafgdshgfvnbvnvnvn B: Descriptio N Alternate FunctionnareshhhhhNo ratings yet
- Ap3031 PDFDocument17 pagesAp3031 PDFAbel GaunaNo ratings yet
- Renesas Isl28191Document19 pagesRenesas Isl28191fragmentoriNo ratings yet
- Iri-Pro V2Document8 pagesIri-Pro V2Arun KumarNo ratings yet
- What Is A MicrocontrollerDocument92 pagesWhat Is A MicrocontrollerBajrang sisodiya50% (2)
- Computer Simulation of The Monostable MultivibratoDocument4 pagesComputer Simulation of The Monostable Multivibratoakarthi2223No ratings yet
- Z170REG-1 ManualDocument16 pagesZ170REG-1 ManualVăn ST QuangNo ratings yet
- Optical Sensor: Product Data SheetDocument32 pagesOptical Sensor: Product Data SheetMOHAMED ALI OTHMANNo ratings yet
- Modbus IO Module v1.2Document12 pagesModbus IO Module v1.2Andrey KuzhilnyNo ratings yet
- Lab 8 and 9Document8 pagesLab 8 and 9SARANG ABBASINo ratings yet
- Eaton ATSDocument2 pagesEaton ATShassan329No ratings yet
- Physics and Technology of Crystalline Oxide Semiconductor CAAC-IGZO: Application to LSIFrom EverandPhysics and Technology of Crystalline Oxide Semiconductor CAAC-IGZO: Application to LSINo ratings yet
- Motor Protection Relay: Technical Reference ManualDocument11 pagesMotor Protection Relay: Technical Reference Manualmehmet gezerNo ratings yet
- Modeling and Simulation of A Power Circuit Breaker: Session 1559Document5 pagesModeling and Simulation of A Power Circuit Breaker: Session 1559mehmet gezerNo ratings yet
- Voltage Phase Angle Current Phase AngleDocument2 pagesVoltage Phase Angle Current Phase Anglemehmet gezerNo ratings yet
- CM-EFS.2S: CM-EFS.2S Voltage Monitoring Relay 2c/o, B-C 3-600VRMS, 24-240VAC/DCDocument4 pagesCM-EFS.2S: CM-EFS.2S Voltage Monitoring Relay 2c/o, B-C 3-600VRMS, 24-240VAC/DCmehmet gezerNo ratings yet
- Data Sheet 6GK6023-0AS1.-.... : Transmission RateDocument7 pagesData Sheet 6GK6023-0AS1.-.... : Transmission Ratemehmet gezerNo ratings yet
- Fault Analyses: Assess The Potential Impact of Faults in Electric Power SystemsDocument2 pagesFault Analyses: Assess The Potential Impact of Faults in Electric Power Systemsmehmet gezerNo ratings yet
- 1 Load Flow - Br917015en PDFDocument2 pages1 Load Flow - Br917015en PDFmehmet gezerNo ratings yet
- USB 2.0 Video PC Camera Controller SN9C270A Datasheet: Document No.: SA3TD-270ADocument20 pagesUSB 2.0 Video PC Camera Controller SN9C270A Datasheet: Document No.: SA3TD-270AВладимир ЧакийNo ratings yet
- CircuitikzmanualDocument178 pagesCircuitikzmanualEmily LopezNo ratings yet
- MB15N351 Spec SheetDocument2 pagesMB15N351 Spec SheetNuty IonutNo ratings yet
- Gainclone Power Amplifier LM3886Document9 pagesGainclone Power Amplifier LM3886JEOVADJNo ratings yet
- Automatic Load Sharing of Transformer Using ArduinoDocument3 pagesAutomatic Load Sharing of Transformer Using ArduinoKudzai Dube100% (1)
- NVR 40 CH 16 SataDocument3 pagesNVR 40 CH 16 SataIlham syamNo ratings yet
- Electronics Illustrated 1972 07Document100 pagesElectronics Illustrated 1972 07KomtelecNo ratings yet
- Jurnal Resti: Analisis Kinerja Skema MPEG Surround Pada Pengkodean Audio 22 Kanal Menggunakan Bitrate 1000 - 2000 KbpsDocument11 pagesJurnal Resti: Analisis Kinerja Skema MPEG Surround Pada Pengkodean Audio 22 Kanal Menggunakan Bitrate 1000 - 2000 KbpsMr. JokerNo ratings yet
- Link - LA LUCUMA To Torre2 - Installation - ReportDocument7 pagesLink - LA LUCUMA To Torre2 - Installation - ReportCarlos Jesus Koo LabrinNo ratings yet
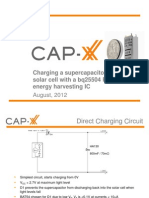
- 1208 CAP-XX - Charging A Supercapacitor From A Solar CellDocument12 pages1208 CAP-XX - Charging A Supercapacitor From A Solar CellG NAVEEN KUMAR100% (1)
- Commodore Component Catalog 1981Document194 pagesCommodore Component Catalog 1981Dave0% (1)
- Experiment No.12 PDFDocument5 pagesExperiment No.12 PDFAlisha AkterNo ratings yet
- Practical Electronics 1966 11 S OCR2 PDFDocument70 pagesPractical Electronics 1966 11 S OCR2 PDFCarlos SoaresNo ratings yet
- VICTORY KRAKEN PREAMP PEDAL ManualDocument12 pagesVICTORY KRAKEN PREAMP PEDAL Manualandreas papandreouNo ratings yet
- Lecture 3 Unit 1 Introduction To Microcomputer SystemsDocument8 pagesLecture 3 Unit 1 Introduction To Microcomputer SystemsvinitkumarNo ratings yet
- This Guide For: I. How To Connect Internet. II. How To Make It My Wireless Router SecureDocument5 pagesThis Guide For: I. How To Connect Internet. II. How To Make It My Wireless Router Securesravan437No ratings yet
- Product - File - F21 Series E Brochure PDFDocument2 pagesProduct - File - F21 Series E Brochure PDFzukaaa123No ratings yet
- 220-1001 Comptia A+ Certification Exam: Core 1 173 Questions and AnswersDocument63 pages220-1001 Comptia A+ Certification Exam: Core 1 173 Questions and AnswersAngel Gabriel De la Cruz100% (1)
- Q522.2he LaDocument123 pagesQ522.2he LaMarko Vujinović100% (1)
- Case StudyDocument4 pagesCase StudyAramarie Princess Acena GeganteNo ratings yet
- Motorola r765IS User GuideDocument142 pagesMotorola r765IS User GuideSprintGurusNo ratings yet
- Electronic Locker SystemDocument40 pagesElectronic Locker Systemericbalmores100% (3)
- Weighing Scale PCB User ManualDocument6 pagesWeighing Scale PCB User ManualRam Mohan ChalamalasettyNo ratings yet
- List of ComponentsDocument13 pagesList of ComponentsBenita AgbagwaraNo ratings yet
- Mechatronics Lab 5level Measurement 20008Document3 pagesMechatronics Lab 5level Measurement 20008Kannan MuthusamyNo ratings yet
- Slup202 - Understanding and Optimizing EMC in SMPSDocument18 pagesSlup202 - Understanding and Optimizing EMC in SMPSjonatanrafaelNo ratings yet