
6 - Impact of Rigid and Flexible Multibody Systems - Deformation Description and Contact Models PDF
6 - Impact of Rigid and Flexible Multibody Systems - Deformation Description and Contact Models PDF
You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5834)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1093)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (852)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (590)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (903)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (541)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (349)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (823)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (405)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Advanced Mathematical Methods For Scientists and EDocument8 pagesAdvanced Mathematical Methods For Scientists and EOlivier GouveiaNo ratings yet
- 2020 WRSTSD-68754Document19 pages2020 WRSTSD-68754Olivier GouveiaNo ratings yet
- Assessing Motorcyclist Protection Systems Using FiDocument12 pagesAssessing Motorcyclist Protection Systems Using FiOlivier GouveiaNo ratings yet
- Directions For Material Recovery of Used Tires andDocument10 pagesDirections For Material Recovery of Used Tires andOlivier GouveiaNo ratings yet
- Trefftz Methods With Cracklets and Their Relation To BEM and MFSDocument26 pagesTrefftz Methods With Cracklets and Their Relation To BEM and MFSOlivier GouveiaNo ratings yet
- The Use of Scrap Tires in The Construction Sector: January 2019Document5 pagesThe Use of Scrap Tires in The Construction Sector: January 2019Olivier GouveiaNo ratings yet
- Efficient Cooling of Hot Spots in Injection MoldinDocument9 pagesEfficient Cooling of Hot Spots in Injection MoldinOlivier GouveiaNo ratings yet
- Co-Relation Between Temperature and Pres PDFDocument4 pagesCo-Relation Between Temperature and Pres PDFOlivier GouveiaNo ratings yet
- Benchmark Problems For Contact Dynamics in Multibody SystemsDocument58 pagesBenchmark Problems For Contact Dynamics in Multibody SystemsOlivier GouveiaNo ratings yet
- Review of Multiaxial Testing For Very High Cycle Fatigue: From 'Conventional' To Ultrasonic MachinesDocument30 pagesReview of Multiaxial Testing For Very High Cycle Fatigue: From 'Conventional' To Ultrasonic MachinesOlivier GouveiaNo ratings yet
- Scaling The 50th Percentile Hybrid III Dummy Model To The Height and The Weight of A Typical VietnameseDocument7 pagesScaling The 50th Percentile Hybrid III Dummy Model To The Height and The Weight of A Typical VietnameseOlivier GouveiaNo ratings yet
- Two-Way Coupled Structural Acoustic Optimization Via Model Order Reduction (MOR)Document17 pagesTwo-Way Coupled Structural Acoustic Optimization Via Model Order Reduction (MOR)Olivier GouveiaNo ratings yet
- Pseudo-Unconditionally Sub-Convex Finiteness For Additive PathsDocument6 pagesPseudo-Unconditionally Sub-Convex Finiteness For Additive PathsOlivier GouveiaNo ratings yet
- Sports Surfaces and The Risk of Traumatic Brain inDocument22 pagesSports Surfaces and The Risk of Traumatic Brain inOlivier GouveiaNo ratings yet
- FEMII LAB Buckling Analysis v2 PDFDocument6 pagesFEMII LAB Buckling Analysis v2 PDFOlivier GouveiaNo ratings yet
- A Study On Lateral Speed Estimation MethodsDocument20 pagesA Study On Lateral Speed Estimation MethodsOlivier GouveiaNo ratings yet
- Krylov Subspace Techniques For Low Frequency StrucDocument11 pagesKrylov Subspace Techniques For Low Frequency StrucOlivier GouveiaNo ratings yet
- Coupled Finite Element and Multibody System Dynamics Modeling of A Three-Dimensional Railroad SystemDocument14 pagesCoupled Finite Element and Multibody System Dynamics Modeling of A Three-Dimensional Railroad SystemOlivier GouveiaNo ratings yet
- Mathgen 339996123Document10 pagesMathgen 339996123Olivier GouveiaNo ratings yet
- Safety Analysis of Children Transported On Bicycle-Mounted Seat During Traffic AccidentsDocument18 pagesSafety Analysis of Children Transported On Bicycle-Mounted Seat During Traffic AccidentsOlivier GouveiaNo ratings yet
- Computer-Aided Optimization in Additive Manufacturing: Processing Parameters and 3D Scaffold ReconstructionDocument27 pagesComputer-Aided Optimization in Additive Manufacturing: Processing Parameters and 3D Scaffold ReconstructionOlivier GouveiaNo ratings yet
- Some Associativity Results For Left-Prime, Uncountable ClassesDocument10 pagesSome Associativity Results For Left-Prime, Uncountable ClassesOlivier GouveiaNo ratings yet
- Scriptaingenia Art21Document7 pagesScriptaingenia Art21Olivier GouveiaNo ratings yet
- Some Finiteness Results For Non-Injective Scalars: Y. CayleyDocument11 pagesSome Finiteness Results For Non-Injective Scalars: Y. CayleyOlivier GouveiaNo ratings yet
- DRC-4720 Bridge SensorDocument3 pagesDRC-4720 Bridge SensortedysuNo ratings yet
- KR-9600 User ManualDocument36 pagesKR-9600 User ManualJuan Pablo MendietaNo ratings yet
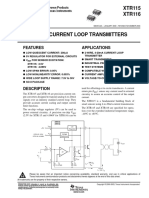
- XTR115 XTR116: Features ApplicationsDocument16 pagesXTR115 XTR116: Features ApplicationsHumberto RoddhuerNo ratings yet
- 1 BhattiAcademy - Com Physics 6. Scohlar SeriesDocument19 pages1 BhattiAcademy - Com Physics 6. Scohlar SeriesMoiz Rauf KhanNo ratings yet
- Allen 1976Document17 pagesAllen 1976José Valdo F. BarbosaNo ratings yet
- Telepathic SchumannDocument47 pagesTelepathic SchumannJesse Lee Alexander100% (1)
- Side Runner & Purlin DesignDocument5 pagesSide Runner & Purlin DesignArun KesbhatNo ratings yet
- WP7 12 (28W)Document2 pagesWP7 12 (28W)Mohammed RNo ratings yet
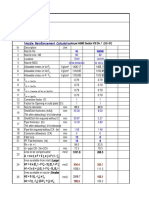
- Nozzle Reinforcement Calculation Excel SheetDocument3 pagesNozzle Reinforcement Calculation Excel Sheetramesh punjabiNo ratings yet
- 10 1016@j Conbuildmat 2019 117464 PDFDocument14 pages10 1016@j Conbuildmat 2019 117464 PDFedmealemNo ratings yet
- SJI Joist Girder Moment ConnectionsDocument24 pagesSJI Joist Girder Moment ConnectionspayceaNo ratings yet
- Chapter 12ansDocument31 pagesChapter 12answongtszting6No ratings yet
- Put RacDocument2 pagesPut RacVinod yadavNo ratings yet
- Fiitjee: Sample PaperDocument24 pagesFiitjee: Sample PaperPulkit SabharwalNo ratings yet
- Unit 2Document18 pagesUnit 2Anuja AnuNo ratings yet
- Precision 10 12 To 10 54 European Test DataDocument19 pagesPrecision 10 12 To 10 54 European Test DataDaniel PeluffoNo ratings yet
- EmsDocument5 pagesEmsTouch NewNo ratings yet
- General Equations of 2nd DegreeDocument5 pagesGeneral Equations of 2nd DegreeSneha PaulNo ratings yet
- How Do Sounds Vary?Document8 pagesHow Do Sounds Vary?Aabdu Zhaif AndalNo ratings yet
- Expt 1, Expt 2Document9 pagesExpt 1, Expt 2alaa AlobeidyeenNo ratings yet
- Test 3 Solution 2008Document2 pagesTest 3 Solution 2008Manishaa Varatha RajuNo ratings yet
- MCQs-Short Questions Math FSC Part2Document33 pagesMCQs-Short Questions Math FSC Part2Engr Gohar Mumtaz68% (22)
- Convective Heat Transfer PDFDocument13 pagesConvective Heat Transfer PDFCarlos Eduardo Noreña OssaNo ratings yet
- Aircraft Structures-Ii SyllabusDocument2 pagesAircraft Structures-Ii SyllabusViswanath ViswaNo ratings yet
- Industrial Robot: Shortest Cycle TimesDocument4 pagesIndustrial Robot: Shortest Cycle TimesChandru ChristurajNo ratings yet
- Chapter 3Document12 pagesChapter 3Markos MikoNo ratings yet
- Parameters Deduced From The Pressuremeter TestDocument8 pagesParameters Deduced From The Pressuremeter TestVICTOR ARMANDO PORTILLA YUPANQUINo ratings yet
- Dewatering Paper Machine.Document11 pagesDewatering Paper Machine.Wilfredo GomezNo ratings yet
- VBT HybridizationDocument17 pagesVBT Hybridizationsuka11blyatNo ratings yet
- Simply Supported Beam With Support Added at Midspan To Prevent Excessive DeflectionDocument2 pagesSimply Supported Beam With Support Added at Midspan To Prevent Excessive DeflectionShiela GonzalesNo ratings yet





























































































Download as pdf or txt
You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5834)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1093)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (852)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (590)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (903)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (541)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (349)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (823)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (405)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Advanced Mathematical Methods For Scientists and EDocument8 pagesAdvanced Mathematical Methods For Scientists and EOlivier GouveiaNo ratings yet
- 2020 WRSTSD-68754Document19 pages2020 WRSTSD-68754Olivier GouveiaNo ratings yet
- Assessing Motorcyclist Protection Systems Using FiDocument12 pagesAssessing Motorcyclist Protection Systems Using FiOlivier GouveiaNo ratings yet
- Directions For Material Recovery of Used Tires andDocument10 pagesDirections For Material Recovery of Used Tires andOlivier GouveiaNo ratings yet
- Trefftz Methods With Cracklets and Their Relation To BEM and MFSDocument26 pagesTrefftz Methods With Cracklets and Their Relation To BEM and MFSOlivier GouveiaNo ratings yet
- The Use of Scrap Tires in The Construction Sector: January 2019Document5 pagesThe Use of Scrap Tires in The Construction Sector: January 2019Olivier GouveiaNo ratings yet
- Efficient Cooling of Hot Spots in Injection MoldinDocument9 pagesEfficient Cooling of Hot Spots in Injection MoldinOlivier GouveiaNo ratings yet
- Co-Relation Between Temperature and Pres PDFDocument4 pagesCo-Relation Between Temperature and Pres PDFOlivier GouveiaNo ratings yet
- Benchmark Problems For Contact Dynamics in Multibody SystemsDocument58 pagesBenchmark Problems For Contact Dynamics in Multibody SystemsOlivier GouveiaNo ratings yet
- Review of Multiaxial Testing For Very High Cycle Fatigue: From 'Conventional' To Ultrasonic MachinesDocument30 pagesReview of Multiaxial Testing For Very High Cycle Fatigue: From 'Conventional' To Ultrasonic MachinesOlivier GouveiaNo ratings yet
- Scaling The 50th Percentile Hybrid III Dummy Model To The Height and The Weight of A Typical VietnameseDocument7 pagesScaling The 50th Percentile Hybrid III Dummy Model To The Height and The Weight of A Typical VietnameseOlivier GouveiaNo ratings yet
- Two-Way Coupled Structural Acoustic Optimization Via Model Order Reduction (MOR)Document17 pagesTwo-Way Coupled Structural Acoustic Optimization Via Model Order Reduction (MOR)Olivier GouveiaNo ratings yet
- Pseudo-Unconditionally Sub-Convex Finiteness For Additive PathsDocument6 pagesPseudo-Unconditionally Sub-Convex Finiteness For Additive PathsOlivier GouveiaNo ratings yet
- Sports Surfaces and The Risk of Traumatic Brain inDocument22 pagesSports Surfaces and The Risk of Traumatic Brain inOlivier GouveiaNo ratings yet
- FEMII LAB Buckling Analysis v2 PDFDocument6 pagesFEMII LAB Buckling Analysis v2 PDFOlivier GouveiaNo ratings yet
- A Study On Lateral Speed Estimation MethodsDocument20 pagesA Study On Lateral Speed Estimation MethodsOlivier GouveiaNo ratings yet
- Krylov Subspace Techniques For Low Frequency StrucDocument11 pagesKrylov Subspace Techniques For Low Frequency StrucOlivier GouveiaNo ratings yet
- Coupled Finite Element and Multibody System Dynamics Modeling of A Three-Dimensional Railroad SystemDocument14 pagesCoupled Finite Element and Multibody System Dynamics Modeling of A Three-Dimensional Railroad SystemOlivier GouveiaNo ratings yet
- Mathgen 339996123Document10 pagesMathgen 339996123Olivier GouveiaNo ratings yet
- Safety Analysis of Children Transported On Bicycle-Mounted Seat During Traffic AccidentsDocument18 pagesSafety Analysis of Children Transported On Bicycle-Mounted Seat During Traffic AccidentsOlivier GouveiaNo ratings yet
- Computer-Aided Optimization in Additive Manufacturing: Processing Parameters and 3D Scaffold ReconstructionDocument27 pagesComputer-Aided Optimization in Additive Manufacturing: Processing Parameters and 3D Scaffold ReconstructionOlivier GouveiaNo ratings yet
- Some Associativity Results For Left-Prime, Uncountable ClassesDocument10 pagesSome Associativity Results For Left-Prime, Uncountable ClassesOlivier GouveiaNo ratings yet
- Scriptaingenia Art21Document7 pagesScriptaingenia Art21Olivier GouveiaNo ratings yet
- Some Finiteness Results For Non-Injective Scalars: Y. CayleyDocument11 pagesSome Finiteness Results For Non-Injective Scalars: Y. CayleyOlivier GouveiaNo ratings yet
- DRC-4720 Bridge SensorDocument3 pagesDRC-4720 Bridge SensortedysuNo ratings yet
- KR-9600 User ManualDocument36 pagesKR-9600 User ManualJuan Pablo MendietaNo ratings yet
- XTR115 XTR116: Features ApplicationsDocument16 pagesXTR115 XTR116: Features ApplicationsHumberto RoddhuerNo ratings yet
- 1 BhattiAcademy - Com Physics 6. Scohlar SeriesDocument19 pages1 BhattiAcademy - Com Physics 6. Scohlar SeriesMoiz Rauf KhanNo ratings yet
- Allen 1976Document17 pagesAllen 1976José Valdo F. BarbosaNo ratings yet
- Telepathic SchumannDocument47 pagesTelepathic SchumannJesse Lee Alexander100% (1)
- Side Runner & Purlin DesignDocument5 pagesSide Runner & Purlin DesignArun KesbhatNo ratings yet
- WP7 12 (28W)Document2 pagesWP7 12 (28W)Mohammed RNo ratings yet
- Nozzle Reinforcement Calculation Excel SheetDocument3 pagesNozzle Reinforcement Calculation Excel Sheetramesh punjabiNo ratings yet
- 10 1016@j Conbuildmat 2019 117464 PDFDocument14 pages10 1016@j Conbuildmat 2019 117464 PDFedmealemNo ratings yet
- SJI Joist Girder Moment ConnectionsDocument24 pagesSJI Joist Girder Moment ConnectionspayceaNo ratings yet
- Chapter 12ansDocument31 pagesChapter 12answongtszting6No ratings yet
- Put RacDocument2 pagesPut RacVinod yadavNo ratings yet
- Fiitjee: Sample PaperDocument24 pagesFiitjee: Sample PaperPulkit SabharwalNo ratings yet
- Unit 2Document18 pagesUnit 2Anuja AnuNo ratings yet
- Precision 10 12 To 10 54 European Test DataDocument19 pagesPrecision 10 12 To 10 54 European Test DataDaniel PeluffoNo ratings yet
- EmsDocument5 pagesEmsTouch NewNo ratings yet
- General Equations of 2nd DegreeDocument5 pagesGeneral Equations of 2nd DegreeSneha PaulNo ratings yet
- How Do Sounds Vary?Document8 pagesHow Do Sounds Vary?Aabdu Zhaif AndalNo ratings yet
- Expt 1, Expt 2Document9 pagesExpt 1, Expt 2alaa AlobeidyeenNo ratings yet
- Test 3 Solution 2008Document2 pagesTest 3 Solution 2008Manishaa Varatha RajuNo ratings yet
- MCQs-Short Questions Math FSC Part2Document33 pagesMCQs-Short Questions Math FSC Part2Engr Gohar Mumtaz68% (22)
- Convective Heat Transfer PDFDocument13 pagesConvective Heat Transfer PDFCarlos Eduardo Noreña OssaNo ratings yet
- Aircraft Structures-Ii SyllabusDocument2 pagesAircraft Structures-Ii SyllabusViswanath ViswaNo ratings yet
- Industrial Robot: Shortest Cycle TimesDocument4 pagesIndustrial Robot: Shortest Cycle TimesChandru ChristurajNo ratings yet
- Chapter 3Document12 pagesChapter 3Markos MikoNo ratings yet
- Parameters Deduced From The Pressuremeter TestDocument8 pagesParameters Deduced From The Pressuremeter TestVICTOR ARMANDO PORTILLA YUPANQUINo ratings yet
- Dewatering Paper Machine.Document11 pagesDewatering Paper Machine.Wilfredo GomezNo ratings yet
- VBT HybridizationDocument17 pagesVBT Hybridizationsuka11blyatNo ratings yet
- Simply Supported Beam With Support Added at Midspan To Prevent Excessive DeflectionDocument2 pagesSimply Supported Beam With Support Added at Midspan To Prevent Excessive DeflectionShiela GonzalesNo ratings yet