
In The Pendulum Simulation, What Variable Affects The Period of The Swinging Pendulums?
In The Pendulum Simulation, What Variable Affects The Period of The Swinging Pendulums?
You might also like
- Governments and Citizens in A Globally Interconnected WorldDocument29 pagesGovernments and Citizens in A Globally Interconnected WorldKB. ACEBRO70% (10)
- College Algebra by Paul Rider PDF Free 30l PDFDocument4 pagesCollege Algebra by Paul Rider PDF Free 30l PDFMonica100% (1)
- Continuous-Time Signal Manipulation: Laboratory ExerciseDocument3 pagesContinuous-Time Signal Manipulation: Laboratory ExerciseKB. ACEBRO50% (2)
- Hooke's LawDocument19 pagesHooke's LawWan Afiff100% (1)
- For Students Who Chose The Offline Way of Completing Tasks/activitiesDocument2 pagesFor Students Who Chose The Offline Way of Completing Tasks/activitiesKB. ACEBRONo ratings yet
- Ian Robb a.M.I.struct.E. (Auth.) - Steel Frame Design Examples-Macmillan Education UK (1961)Document216 pagesIan Robb a.M.I.struct.E. (Auth.) - Steel Frame Design Examples-Macmillan Education UK (1961)GT100% (1)
- Hooke's Law - Lesson 3 PDFDocument5 pagesHooke's Law - Lesson 3 PDFNurfatynzulaikha ZukilaNo ratings yet
- Hooke S LawDocument5 pagesHooke S Lawخلود البطاحNo ratings yet
- Physic Lab Report 1 (Correction)Document16 pagesPhysic Lab Report 1 (Correction)Khairun HusnaNo ratings yet
- Static EquilibriumDocument8 pagesStatic EquilibriumchilalaloudsNo ratings yet
- Determination of The Spring Constant andDocument10 pagesDetermination of The Spring Constant andsamihaali.cseluNo ratings yet
- Simple Harmonic Motion: AP Physics BDocument19 pagesSimple Harmonic Motion: AP Physics BMaureen GalinganNo ratings yet
- Simple Harmonic MotionDocument18 pagesSimple Harmonic Motionieja03100% (2)
- Spring Constant-1Document13 pagesSpring Constant-1SURESH SURAGANINo ratings yet
- ForceDocument24 pagesForcenadeemuzairNo ratings yet
- 201 Lab 10. Spring Mass OscillationsDocument8 pages201 Lab 10. Spring Mass OscillationsShanice ThompsonNo ratings yet
- 201 Lab 10. Spring Mass OscillationsDocument8 pages201 Lab 10. Spring Mass OscillationsMa. YashNo ratings yet
- Theory: Figure 1: A Simple PendulumDocument3 pagesTheory: Figure 1: A Simple PendulumKhairul HazmanNo ratings yet
- GRABSUM School Inc. Name: Grade Level and Section: 12 - STEMDocument6 pagesGRABSUM School Inc. Name: Grade Level and Section: 12 - STEMWendell CapiliNo ratings yet
- Lab Report Physics 1Document18 pagesLab Report Physics 1Nisa AzrinNo ratings yet
- Lesson 1 Oscillations V 2023Document13 pagesLesson 1 Oscillations V 2023ANGELA DE LEONNo ratings yet
- 04 C Wave BehaviorDocument106 pages04 C Wave BehaviorKatia Reales PazNo ratings yet
- Widya F. Rompas 19101105017Document10 pagesWidya F. Rompas 19101105017Widya RompasNo ratings yet
- Hooke's Law and Simple Harmonic MotionDocument5 pagesHooke's Law and Simple Harmonic MotionmandoolalaNo ratings yet
- MomentsDocument3 pagesMomentstebogo modisenyaneNo ratings yet
- Powerpoint PHY01 CO5Document51 pagesPowerpoint PHY01 CO5HURHURNo ratings yet
- Dynamics of Rotational Motion - Rotational Inertia - PhysicsDocument17 pagesDynamics of Rotational Motion - Rotational Inertia - PhysicsProDyut ChakraBortyNo ratings yet
- Friscilla Gultom XI MIPA 3-1Document6 pagesFriscilla Gultom XI MIPA 3-1Cillak G.No ratings yet
- Elasticity: Hooke's Law Young's Modulus Bulk Elastic PropertiesDocument12 pagesElasticity: Hooke's Law Young's Modulus Bulk Elastic Propertiesnoorlaily100% (1)
- Torsional Defor-WPS OfficeDocument4 pagesTorsional Defor-WPS OfficereannNo ratings yet
- Hooke's Law (George Ricarrson - 2501987261)Document11 pagesHooke's Law (George Ricarrson - 2501987261)George RYNo ratings yet
- Simple Harmonic MotionDocument51 pagesSimple Harmonic MotionIH MarufNo ratings yet
- OscillationsDocument32 pagesOscillationsMohdFazlenNo ratings yet
- 3.07 Moments and LeversDocument33 pages3.07 Moments and LeversMohab MqattashNo ratings yet
- Simple Harmonic MotionDocument45 pagesSimple Harmonic MotionKarrthiNo ratings yet
- Punjab Boards 10th Class Physics Book English Medium 6368072829234769390 PDFDocument201 pagesPunjab Boards 10th Class Physics Book English Medium 6368072829234769390 PDFSaqib SaleemNo ratings yet
- National University of SingaporeDocument5 pagesNational University of SingaporeLNathan91No ratings yet
- CH 9Document85 pagesCH 9Ferdinand Yohannes Van LankhorstNo ratings yet
- 4 PHYSICS WEEK 5 StabilityDocument2 pages4 PHYSICS WEEK 5 StabilityTia-marie Mc AlisterNo ratings yet
- MY PHY 101 NoteDocument10 pagesMY PHY 101 Notebukolaesan48No ratings yet
- Centrifugal Effect On Belts: Determining Angle of WrapDocument16 pagesCentrifugal Effect On Belts: Determining Angle of WrapARI BENINo ratings yet
- Phy116 5Document9 pagesPhy116 5Fahim HoqueNo ratings yet
- ET202A B-1 (Unit 3)Document21 pagesET202A B-1 (Unit 3)Darrell Carl Rizo JoseNo ratings yet
- 1 Stress and StrainDocument14 pages1 Stress and StraincikmonNo ratings yet
- HOOKE's Law Lab Report-2Document2 pagesHOOKE's Law Lab Report-2nazliaktanconerNo ratings yet
- Chapter 2 Lecture NoteDocument19 pagesChapter 2 Lecture NoteeyobNo ratings yet
- Application of Simple Harmonic MotionDocument6 pagesApplication of Simple Harmonic MotionNarayan VarmaNo ratings yet
- 107 Lab 3Document7 pages107 Lab 3Tanvir MahtabNo ratings yet
- Harmonic Oscillator I: Introduction:) On The Particle VanishesDocument17 pagesHarmonic Oscillator I: Introduction:) On The Particle Vanishespusa123No ratings yet
- UntitledDocument5 pagesUntitledLuis Fernando Morales AnguloNo ratings yet
- Mechanics of Deformable Bodies Module 2Document19 pagesMechanics of Deformable Bodies Module 2eysNo ratings yet
- Force: M R X F Where M Is The Moment Vector and R Is TheDocument3 pagesForce: M R X F Where M Is The Moment Vector and R Is TheJayatsen SharmaNo ratings yet
- Lecture 1 OSCILLATIONS AND WAVES-FinalDocument25 pagesLecture 1 OSCILLATIONS AND WAVES-FinalElisha ManishimweNo ratings yet
- Problem SetsDocument7 pagesProblem Setsafly YNo ratings yet
- Lesson 4 - Rigid Body Statics: Taking Into Account Finite Size of Rigid BodiesDocument7 pagesLesson 4 - Rigid Body Statics: Taking Into Account Finite Size of Rigid BodiesnageshNo ratings yet
- AERODocument7 pagesAEROperdezultuNo ratings yet
- Physics AssignmentDocument16 pagesPhysics Assignmentnagentharao sivaramNo ratings yet
- Lab 3 PrintDocument5 pagesLab 3 PrintTawsif ahmedNo ratings yet
- ch04 07ggggDocument5 pagesch04 07ggggwill bellNo ratings yet
- Pptg101213 Rotations GallegoDocument39 pagesPptg101213 Rotations GallegoRed GallegoNo ratings yet
- SHM in Simple Pendulum XIDocument21 pagesSHM in Simple Pendulum XIOdayar ThangavelNo ratings yet
- Physics Lab SpringDocument3 pagesPhysics Lab SpringJackie ManNo ratings yet
- SCI1307Document71 pagesSCI1307Yashika Bhathiya JayasingheNo ratings yet
- Power, Momentum and Collisions - Physics for Kids - 5th Grade | Children's Physics BooksFrom EverandPower, Momentum and Collisions - Physics for Kids - 5th Grade | Children's Physics BooksNo ratings yet
- Relosa Task Performance Bohas April 6Document3 pagesRelosa Task Performance Bohas April 6KB. ACEBRONo ratings yet
- Thesis Chapters 1-3 Group 5Document9 pagesThesis Chapters 1-3 Group 5KB. ACEBRO100% (2)
- Aquaponics With Crop Health Detection Using A.I.: Midterm Task PerformanceDocument4 pagesAquaponics With Crop Health Detection Using A.I.: Midterm Task PerformanceKB. ACEBRONo ratings yet
- Test Case ID Description Affected Module Created By: Project NameDocument12 pagesTest Case ID Description Affected Module Created By: Project NameKB. ACEBRONo ratings yet
- Case Study Group 5 Task PerformanceDocument4 pagesCase Study Group 5 Task PerformanceKB. ACEBRONo ratings yet
- Relosa - 01 Activity 1 - Quantitative MethodsDocument1 pageRelosa - 01 Activity 1 - Quantitative MethodsKB. ACEBRONo ratings yet
- Submitted: Bachelor of Technology in Mechanical EngineeringDocument48 pagesSubmitted: Bachelor of Technology in Mechanical Engineeringsneha sahuNo ratings yet
- Effect of Coriolis Forces On Hydraulic TurbinesDocument2 pagesEffect of Coriolis Forces On Hydraulic TurbinesAntra ChowdhuryNo ratings yet
- hd01 enDocument314 pageshd01 enJorge Luis MarechalNo ratings yet
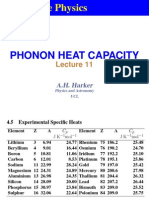
- Solid State Physics: Phonon Heat CapacityDocument25 pagesSolid State Physics: Phonon Heat CapacityGetachew YirgaNo ratings yet
- Balkan MO 2008-19 EN With SolutionsDocument51 pagesBalkan MO 2008-19 EN With SolutionsVoinea MarianNo ratings yet
- TitrationSE PDFDocument7 pagesTitrationSE PDFAmaan Allana33% (3)
- Determination of Performance Degradation of A Marine Diesel Engine by Using Curve Based ApproachDocument30 pagesDetermination of Performance Degradation of A Marine Diesel Engine by Using Curve Based ApproachDhanaNo ratings yet
- Behrens 1990 On The Mechanisms of Cation Diffusi PDFDocument17 pagesBehrens 1990 On The Mechanisms of Cation Diffusi PDFsuman mondalNo ratings yet
- Module 5 Rational Functions Equations and InequalitiesDocument24 pagesModule 5 Rational Functions Equations and InequalitiesRoger CorrosNo ratings yet
- 3500/3501 - Precision Potentiometer: FeaturesDocument2 pages3500/3501 - Precision Potentiometer: FeaturesAndrés JassoNo ratings yet
- Size of Source Effect of A Transfer Reference TherDocument5 pagesSize of Source Effect of A Transfer Reference TherRONALD ALFONSO PACHECO TORRESNo ratings yet
- English FinalDocument12 pagesEnglish Finaluday ARYANo ratings yet
- Students Perceptions of The Command Practice andDocument565 pagesStudents Perceptions of The Command Practice andRuchaNo ratings yet
- Time ReversalDocument9 pagesTime ReversalAlberto AlbuquerqueNo ratings yet
- Night Light Sensor SwitchDocument16 pagesNight Light Sensor SwitchJama CasayNo ratings yet
- Beta ProsesDocument4 pagesBeta ProsesDoni TabrNo ratings yet
- Prtest StatisticsDocument6 pagesPrtest StatisticsJahian FloresNo ratings yet
- C1 Algebra - Indices 1 QPDocument2 pagesC1 Algebra - Indices 1 QPWilliam TsuiNo ratings yet
- Jonas Danvind DR - Ltu DT 0523 SeDocument124 pagesJonas Danvind DR - Ltu DT 0523 SeXXNo ratings yet
- Performance Prediction of Niger Delta Reservoir BUZA Using Allocation ToolDocument7 pagesPerformance Prediction of Niger Delta Reservoir BUZA Using Allocation TooljuanfernandoNo ratings yet
- Stainless Steel Pipe and Fittings SpecificationDocument10 pagesStainless Steel Pipe and Fittings SpecificationCassy AbulenciaNo ratings yet
- Science Vocabulary Word List - Enchanted LearningDocument3 pagesScience Vocabulary Word List - Enchanted LearningYram Ecarg OudiserNo ratings yet
- Avon Catlog Folder New-2Document2 pagesAvon Catlog Folder New-2avon earthing pvt. ltd.No ratings yet
- Conditional Probability (Y10 Science)Document13 pagesConditional Probability (Y10 Science)Owain Cato DaniwanNo ratings yet
- Edicto - Thermodynamics Lab - Heat FusionDocument2 pagesEdicto - Thermodynamics Lab - Heat FusionEdicto, Beatrice CarolineNo ratings yet
- 25 - Tutorial 5Document16 pages25 - Tutorial 5Mihir KordeNo ratings yet
- PolymersDocument27 pagesPolymershuy.dicNo ratings yet
- 2023-P4-Science-End of Year ExamDocument36 pages2023-P4-Science-End of Year ExamSuper TradingNo ratings yet

































































































Download as docx, pdf, or txt
You might also like
- Governments and Citizens in A Globally Interconnected WorldDocument29 pagesGovernments and Citizens in A Globally Interconnected WorldKB. ACEBRO70% (10)
- College Algebra by Paul Rider PDF Free 30l PDFDocument4 pagesCollege Algebra by Paul Rider PDF Free 30l PDFMonica100% (1)
- Continuous-Time Signal Manipulation: Laboratory ExerciseDocument3 pagesContinuous-Time Signal Manipulation: Laboratory ExerciseKB. ACEBRO50% (2)
- Hooke's LawDocument19 pagesHooke's LawWan Afiff100% (1)
- For Students Who Chose The Offline Way of Completing Tasks/activitiesDocument2 pagesFor Students Who Chose The Offline Way of Completing Tasks/activitiesKB. ACEBRONo ratings yet
- Ian Robb a.M.I.struct.E. (Auth.) - Steel Frame Design Examples-Macmillan Education UK (1961)Document216 pagesIan Robb a.M.I.struct.E. (Auth.) - Steel Frame Design Examples-Macmillan Education UK (1961)GT100% (1)
- Hooke's Law - Lesson 3 PDFDocument5 pagesHooke's Law - Lesson 3 PDFNurfatynzulaikha ZukilaNo ratings yet
- Hooke S LawDocument5 pagesHooke S Lawخلود البطاحNo ratings yet
- Physic Lab Report 1 (Correction)Document16 pagesPhysic Lab Report 1 (Correction)Khairun HusnaNo ratings yet
- Static EquilibriumDocument8 pagesStatic EquilibriumchilalaloudsNo ratings yet
- Determination of The Spring Constant andDocument10 pagesDetermination of The Spring Constant andsamihaali.cseluNo ratings yet
- Simple Harmonic Motion: AP Physics BDocument19 pagesSimple Harmonic Motion: AP Physics BMaureen GalinganNo ratings yet
- Simple Harmonic MotionDocument18 pagesSimple Harmonic Motionieja03100% (2)
- Spring Constant-1Document13 pagesSpring Constant-1SURESH SURAGANINo ratings yet
- ForceDocument24 pagesForcenadeemuzairNo ratings yet
- 201 Lab 10. Spring Mass OscillationsDocument8 pages201 Lab 10. Spring Mass OscillationsShanice ThompsonNo ratings yet
- 201 Lab 10. Spring Mass OscillationsDocument8 pages201 Lab 10. Spring Mass OscillationsMa. YashNo ratings yet
- Theory: Figure 1: A Simple PendulumDocument3 pagesTheory: Figure 1: A Simple PendulumKhairul HazmanNo ratings yet
- GRABSUM School Inc. Name: Grade Level and Section: 12 - STEMDocument6 pagesGRABSUM School Inc. Name: Grade Level and Section: 12 - STEMWendell CapiliNo ratings yet
- Lab Report Physics 1Document18 pagesLab Report Physics 1Nisa AzrinNo ratings yet
- Lesson 1 Oscillations V 2023Document13 pagesLesson 1 Oscillations V 2023ANGELA DE LEONNo ratings yet
- 04 C Wave BehaviorDocument106 pages04 C Wave BehaviorKatia Reales PazNo ratings yet
- Widya F. Rompas 19101105017Document10 pagesWidya F. Rompas 19101105017Widya RompasNo ratings yet
- Hooke's Law and Simple Harmonic MotionDocument5 pagesHooke's Law and Simple Harmonic MotionmandoolalaNo ratings yet
- MomentsDocument3 pagesMomentstebogo modisenyaneNo ratings yet
- Powerpoint PHY01 CO5Document51 pagesPowerpoint PHY01 CO5HURHURNo ratings yet
- Dynamics of Rotational Motion - Rotational Inertia - PhysicsDocument17 pagesDynamics of Rotational Motion - Rotational Inertia - PhysicsProDyut ChakraBortyNo ratings yet
- Friscilla Gultom XI MIPA 3-1Document6 pagesFriscilla Gultom XI MIPA 3-1Cillak G.No ratings yet
- Elasticity: Hooke's Law Young's Modulus Bulk Elastic PropertiesDocument12 pagesElasticity: Hooke's Law Young's Modulus Bulk Elastic Propertiesnoorlaily100% (1)
- Torsional Defor-WPS OfficeDocument4 pagesTorsional Defor-WPS OfficereannNo ratings yet
- Hooke's Law (George Ricarrson - 2501987261)Document11 pagesHooke's Law (George Ricarrson - 2501987261)George RYNo ratings yet
- Simple Harmonic MotionDocument51 pagesSimple Harmonic MotionIH MarufNo ratings yet
- OscillationsDocument32 pagesOscillationsMohdFazlenNo ratings yet
- 3.07 Moments and LeversDocument33 pages3.07 Moments and LeversMohab MqattashNo ratings yet
- Simple Harmonic MotionDocument45 pagesSimple Harmonic MotionKarrthiNo ratings yet
- Punjab Boards 10th Class Physics Book English Medium 6368072829234769390 PDFDocument201 pagesPunjab Boards 10th Class Physics Book English Medium 6368072829234769390 PDFSaqib SaleemNo ratings yet
- National University of SingaporeDocument5 pagesNational University of SingaporeLNathan91No ratings yet
- CH 9Document85 pagesCH 9Ferdinand Yohannes Van LankhorstNo ratings yet
- 4 PHYSICS WEEK 5 StabilityDocument2 pages4 PHYSICS WEEK 5 StabilityTia-marie Mc AlisterNo ratings yet
- MY PHY 101 NoteDocument10 pagesMY PHY 101 Notebukolaesan48No ratings yet
- Centrifugal Effect On Belts: Determining Angle of WrapDocument16 pagesCentrifugal Effect On Belts: Determining Angle of WrapARI BENINo ratings yet
- Phy116 5Document9 pagesPhy116 5Fahim HoqueNo ratings yet
- ET202A B-1 (Unit 3)Document21 pagesET202A B-1 (Unit 3)Darrell Carl Rizo JoseNo ratings yet
- 1 Stress and StrainDocument14 pages1 Stress and StraincikmonNo ratings yet
- HOOKE's Law Lab Report-2Document2 pagesHOOKE's Law Lab Report-2nazliaktanconerNo ratings yet
- Chapter 2 Lecture NoteDocument19 pagesChapter 2 Lecture NoteeyobNo ratings yet
- Application of Simple Harmonic MotionDocument6 pagesApplication of Simple Harmonic MotionNarayan VarmaNo ratings yet
- 107 Lab 3Document7 pages107 Lab 3Tanvir MahtabNo ratings yet
- Harmonic Oscillator I: Introduction:) On The Particle VanishesDocument17 pagesHarmonic Oscillator I: Introduction:) On The Particle Vanishespusa123No ratings yet
- UntitledDocument5 pagesUntitledLuis Fernando Morales AnguloNo ratings yet
- Mechanics of Deformable Bodies Module 2Document19 pagesMechanics of Deformable Bodies Module 2eysNo ratings yet
- Force: M R X F Where M Is The Moment Vector and R Is TheDocument3 pagesForce: M R X F Where M Is The Moment Vector and R Is TheJayatsen SharmaNo ratings yet
- Lecture 1 OSCILLATIONS AND WAVES-FinalDocument25 pagesLecture 1 OSCILLATIONS AND WAVES-FinalElisha ManishimweNo ratings yet
- Problem SetsDocument7 pagesProblem Setsafly YNo ratings yet
- Lesson 4 - Rigid Body Statics: Taking Into Account Finite Size of Rigid BodiesDocument7 pagesLesson 4 - Rigid Body Statics: Taking Into Account Finite Size of Rigid BodiesnageshNo ratings yet
- AERODocument7 pagesAEROperdezultuNo ratings yet
- Physics AssignmentDocument16 pagesPhysics Assignmentnagentharao sivaramNo ratings yet
- Lab 3 PrintDocument5 pagesLab 3 PrintTawsif ahmedNo ratings yet
- ch04 07ggggDocument5 pagesch04 07ggggwill bellNo ratings yet
- Pptg101213 Rotations GallegoDocument39 pagesPptg101213 Rotations GallegoRed GallegoNo ratings yet
- SHM in Simple Pendulum XIDocument21 pagesSHM in Simple Pendulum XIOdayar ThangavelNo ratings yet
- Physics Lab SpringDocument3 pagesPhysics Lab SpringJackie ManNo ratings yet
- SCI1307Document71 pagesSCI1307Yashika Bhathiya JayasingheNo ratings yet
- Power, Momentum and Collisions - Physics for Kids - 5th Grade | Children's Physics BooksFrom EverandPower, Momentum and Collisions - Physics for Kids - 5th Grade | Children's Physics BooksNo ratings yet
- Relosa Task Performance Bohas April 6Document3 pagesRelosa Task Performance Bohas April 6KB. ACEBRONo ratings yet
- Thesis Chapters 1-3 Group 5Document9 pagesThesis Chapters 1-3 Group 5KB. ACEBRO100% (2)
- Aquaponics With Crop Health Detection Using A.I.: Midterm Task PerformanceDocument4 pagesAquaponics With Crop Health Detection Using A.I.: Midterm Task PerformanceKB. ACEBRONo ratings yet
- Test Case ID Description Affected Module Created By: Project NameDocument12 pagesTest Case ID Description Affected Module Created By: Project NameKB. ACEBRONo ratings yet
- Case Study Group 5 Task PerformanceDocument4 pagesCase Study Group 5 Task PerformanceKB. ACEBRONo ratings yet
- Relosa - 01 Activity 1 - Quantitative MethodsDocument1 pageRelosa - 01 Activity 1 - Quantitative MethodsKB. ACEBRONo ratings yet
- Submitted: Bachelor of Technology in Mechanical EngineeringDocument48 pagesSubmitted: Bachelor of Technology in Mechanical Engineeringsneha sahuNo ratings yet
- Effect of Coriolis Forces On Hydraulic TurbinesDocument2 pagesEffect of Coriolis Forces On Hydraulic TurbinesAntra ChowdhuryNo ratings yet
- hd01 enDocument314 pageshd01 enJorge Luis MarechalNo ratings yet
- Solid State Physics: Phonon Heat CapacityDocument25 pagesSolid State Physics: Phonon Heat CapacityGetachew YirgaNo ratings yet
- Balkan MO 2008-19 EN With SolutionsDocument51 pagesBalkan MO 2008-19 EN With SolutionsVoinea MarianNo ratings yet
- TitrationSE PDFDocument7 pagesTitrationSE PDFAmaan Allana33% (3)
- Determination of Performance Degradation of A Marine Diesel Engine by Using Curve Based ApproachDocument30 pagesDetermination of Performance Degradation of A Marine Diesel Engine by Using Curve Based ApproachDhanaNo ratings yet
- Behrens 1990 On The Mechanisms of Cation Diffusi PDFDocument17 pagesBehrens 1990 On The Mechanisms of Cation Diffusi PDFsuman mondalNo ratings yet
- Module 5 Rational Functions Equations and InequalitiesDocument24 pagesModule 5 Rational Functions Equations and InequalitiesRoger CorrosNo ratings yet
- 3500/3501 - Precision Potentiometer: FeaturesDocument2 pages3500/3501 - Precision Potentiometer: FeaturesAndrés JassoNo ratings yet
- Size of Source Effect of A Transfer Reference TherDocument5 pagesSize of Source Effect of A Transfer Reference TherRONALD ALFONSO PACHECO TORRESNo ratings yet
- English FinalDocument12 pagesEnglish Finaluday ARYANo ratings yet
- Students Perceptions of The Command Practice andDocument565 pagesStudents Perceptions of The Command Practice andRuchaNo ratings yet
- Time ReversalDocument9 pagesTime ReversalAlberto AlbuquerqueNo ratings yet
- Night Light Sensor SwitchDocument16 pagesNight Light Sensor SwitchJama CasayNo ratings yet
- Beta ProsesDocument4 pagesBeta ProsesDoni TabrNo ratings yet
- Prtest StatisticsDocument6 pagesPrtest StatisticsJahian FloresNo ratings yet
- C1 Algebra - Indices 1 QPDocument2 pagesC1 Algebra - Indices 1 QPWilliam TsuiNo ratings yet
- Jonas Danvind DR - Ltu DT 0523 SeDocument124 pagesJonas Danvind DR - Ltu DT 0523 SeXXNo ratings yet
- Performance Prediction of Niger Delta Reservoir BUZA Using Allocation ToolDocument7 pagesPerformance Prediction of Niger Delta Reservoir BUZA Using Allocation TooljuanfernandoNo ratings yet
- Stainless Steel Pipe and Fittings SpecificationDocument10 pagesStainless Steel Pipe and Fittings SpecificationCassy AbulenciaNo ratings yet
- Science Vocabulary Word List - Enchanted LearningDocument3 pagesScience Vocabulary Word List - Enchanted LearningYram Ecarg OudiserNo ratings yet
- Avon Catlog Folder New-2Document2 pagesAvon Catlog Folder New-2avon earthing pvt. ltd.No ratings yet
- Conditional Probability (Y10 Science)Document13 pagesConditional Probability (Y10 Science)Owain Cato DaniwanNo ratings yet
- Edicto - Thermodynamics Lab - Heat FusionDocument2 pagesEdicto - Thermodynamics Lab - Heat FusionEdicto, Beatrice CarolineNo ratings yet
- 25 - Tutorial 5Document16 pages25 - Tutorial 5Mihir KordeNo ratings yet
- PolymersDocument27 pagesPolymershuy.dicNo ratings yet
- 2023-P4-Science-End of Year ExamDocument36 pages2023-P4-Science-End of Year ExamSuper TradingNo ratings yet