Download as pdf or txt
You might also like
- Evc C3Document386 pagesEvc C3Amr Helal100% (4)
- Series 45 Frame F Open Circuit Pump: Parts ManualDocument48 pagesSeries 45 Frame F Open Circuit Pump: Parts ManualJose Manuel Barroso PantojaNo ratings yet
- Leah Hartsock: Gravitational-Potential WorkDocument3 pagesLeah Hartsock: Gravitational-Potential WorkRHEAMAE GALLEGONo ratings yet
- HDM Technical Data Manual Issue 5.3Document127 pagesHDM Technical Data Manual Issue 5.3Binu Kollannoor100% (1)
- C640D5Document4 pagesC640D5mohsen_cumminsNo ratings yet
- Beech Super King Air B200Document2 pagesBeech Super King Air B200Manuel Toral100% (7)
- Introductory Rotational Apparatus: Instruction Manual and Experiment Guide For The PASCO Scientific Model ME-9341Document40 pagesIntroductory Rotational Apparatus: Instruction Manual and Experiment Guide For The PASCO Scientific Model ME-9341Aldana Ayelén MercadoNo ratings yet
- Sany sr250 250 KN M Torque Piling RigDocument25 pagesSany sr250 250 KN M Torque Piling Rigikhtiyar ali khan ikhtiyarNo ratings yet
- MSMBJSACDocument4 pagesMSMBJSACVarshaNo ratings yet
- RTL Series Linear Motion PotentiometerDocument2 pagesRTL Series Linear Motion Potentiometeralireza.str1995No ratings yet
- Cms Electronics BoardDocument11 pagesCms Electronics BoardLuis Fernando Becerra JimenezNo ratings yet
- Low Voltage Alternators - 4 Pole LSA 49.1: 660 To 1000 kVA - 50 HZ / 792 To 1250 kVA - 60 HZDocument12 pagesLow Voltage Alternators - 4 Pole LSA 49.1: 660 To 1000 kVA - 50 HZ / 792 To 1250 kVA - 60 HZDaniel ArdilaNo ratings yet
- Dyadic Systems CatalogDocument14 pagesDyadic Systems CatalogJuan Francisco Sanchez MassadiNo ratings yet
- Eaton Xap-S En-8Document1 pageEaton Xap-S En-8Eagan Wafi IndrastaNo ratings yet
- Catálogo General Medidor para Agua WoltmanDocument8 pagesCatálogo General Medidor para Agua WoltmanLuis David LopezNo ratings yet
- Dyadic Mechatronics Cylinder CatalogDocument16 pagesDyadic Mechatronics Cylinder CatalogElectromateNo ratings yet
- MCP Gis Chain HoistsDocument5 pagesMCP Gis Chain HoistsjohovitchNo ratings yet
- Emtex Machinery Pvt. LTDDocument2 pagesEmtex Machinery Pvt. LTDPrasanna kumar subudhiNo ratings yet
- R9500 - Assemblaggio Jacquard - 120711046 - ENGDocument29 pagesR9500 - Assemblaggio Jacquard - 120711046 - ENGpacheco bNo ratings yet
- AC Induction Motor MonitoringDocument4 pagesAC Induction Motor MonitoringAnonymous PVXBGg9TNo ratings yet
- Dyadic Mechatronics Cylinder CatalogDocument16 pagesDyadic Mechatronics Cylinder CatalogJuan Francisco Sanchez MassadiNo ratings yet
- Product Data Sheet 6FX2001-2GB00: Date: 08/06/2014 Subject To ModificationsDocument3 pagesProduct Data Sheet 6FX2001-2GB00: Date: 08/06/2014 Subject To ModificationsNhatQuangNguyenNo ratings yet
- M 300 C Specification BrochureDocument3 pagesM 300 C Specification BrochureSouidiNo ratings yet
- Man L23/30H MK 2 GensetDocument2 pagesMan L23/30H MK 2 GensetamasrurNo ratings yet
- R7 Series Datasheet en 200607Document8 pagesR7 Series Datasheet en 200607Dany VallejoNo ratings yet
- Dual Stator Winding Induction Machine Drive PDFDocument8 pagesDual Stator Winding Induction Machine Drive PDFTaiwoNo ratings yet
- Ls Mop3 230Document3 pagesLs Mop3 230aglopez10No ratings yet
- SSH-G01: Hall-Effect Gear Tooth Speed and Direction SensorDocument3 pagesSSH-G01: Hall-Effect Gear Tooth Speed and Direction SensorVahn RaymundoNo ratings yet
- MR-J3 Brochure Ver D 07-07Document125 pagesMR-J3 Brochure Ver D 07-07TetsusaigaNo ratings yet
- Ai-9 FTTH Optical Fiber Fusion SplicerDocument2 pagesAi-9 FTTH Optical Fiber Fusion SplicerRafael BoneNo ratings yet
- IRT Drive 4005 Manual-1Document17 pagesIRT Drive 4005 Manual-1herbiklaNo ratings yet
- Marelli PDFDocument98 pagesMarelli PDFEugenNo ratings yet
- APEXSP-1100 en MotorDocument1 pageAPEXSP-1100 en MotorSoul BladeNo ratings yet
- MODELS 6400/6405 Spectrophotometers Operating Manual: 640 050/REV B/11-99Document51 pagesMODELS 6400/6405 Spectrophotometers Operating Manual: 640 050/REV B/11-99Fawzi ALLALANo ratings yet
- Cat VisamEN 0822 05-2Document20 pagesCat VisamEN 0822 05-2Đăng Điệp NguyễnNo ratings yet
- SBM 1250 Double Twist Bunching LineDocument12 pagesSBM 1250 Double Twist Bunching LineEMRE KAAN USTANo ratings yet
- Dyadic Systems 2011 CatalogDocument16 pagesDyadic Systems 2011 CatalogElectromateNo ratings yet
- I47E en 01+SigmaServoMotors+DatasheetDocument18 pagesI47E en 01+SigmaServoMotors+Datasheetarzoo105No ratings yet
- Manual SO2164430-i1Document80 pagesManual SO2164430-i1Savinda JanszNo ratings yet
- Analog Continuous Rotation Servo Motor, 6V, 360°: Apply Environmental ConditionDocument2 pagesAnalog Continuous Rotation Servo Motor, 6V, 360°: Apply Environmental ConditionSEK channelNo ratings yet
- Cambridge Technology Mirror Positioning System ManualDocument68 pagesCambridge Technology Mirror Positioning System ManualChih-Wei ChangNo ratings yet
- 167 kVA - 274 kVA: AVR HDocument2 pages167 kVA - 274 kVA: AVR HSidali KilardjNo ratings yet
- MAG BR600T Barrier-Gate - Specification-SheetDocument6 pagesMAG BR600T Barrier-Gate - Specification-Sheetyuzuan9No ratings yet
- WW 700Document0 pagesWW 700echtrysNo ratings yet
- N-Quotation of Hfqa-1800w 1 3Document13 pagesN-Quotation of Hfqa-1800w 1 3api-724687963No ratings yet
- Cataloque HV Slipring MotorsDocument20 pagesCataloque HV Slipring Motorsرضوان محمد مرعي كاملNo ratings yet
- SCM-C6200CNC 型数控卷簧机: 20mm CNC Compression Spring Coiling MachineDocument1 pageSCM-C6200CNC 型数控卷簧机: 20mm CNC Compression Spring Coiling Machinejaswand2010No ratings yet
- 5 DG OH 17.5 (From Eng Salah 19 October)Document8 pages5 DG OH 17.5 (From Eng Salah 19 October)ايهاب العيسويNo ratings yet
- Ye-200901-1 SC6016-25SS PDFDocument19 pagesYe-200901-1 SC6016-25SS PDFSalah AhmedNo ratings yet
- Dyadic Systems 2011 CatalogDocument16 pagesDyadic Systems 2011 CatalogServo2GoNo ratings yet
- NPM SCR 75 SpecsheetDocument2 pagesNPM SCR 75 SpecsheetElectromateNo ratings yet
- Seatex Mru5Document2 pagesSeatex Mru5pranavNo ratings yet
- General Description: Making Technology Work For You!Document2 pagesGeneral Description: Making Technology Work For You!ahmetNo ratings yet
- Mp8000 Data SheetDocument5 pagesMp8000 Data SheetLuis RomeroNo ratings yet
- RP0910Document7 pagesRP0910angelescuoNo ratings yet
- Stacker 94 95Document2 pagesStacker 94 95AfshinNo ratings yet
- Operating InstructionsDocument73 pagesOperating InstructionsxionaraguerreroNo ratings yet
- 2013 Prestolite CatalogDocument32 pages2013 Prestolite CatalogAlan ArcuriNo ratings yet
- Block Diagram: Body of RobotDocument11 pagesBlock Diagram: Body of RobotAbraham Rohith RoyNo ratings yet
- LV Alternator (730kVA)Document12 pagesLV Alternator (730kVA)AfiqNo ratings yet
- Fluid CouplingsDocument52 pagesFluid Couplingsvikubhardwaj9224No ratings yet
- Economical, Miniature Limit Switch Boasting Rigid ConstructionDocument5 pagesEconomical, Miniature Limit Switch Boasting Rigid ConstructionRajeev Saini100% (1)
- FT7000 User 9510Document22 pagesFT7000 User 9510Son TonNo ratings yet
- SYSTRON DONNER 5000A Operation ManualDocument42 pagesSYSTRON DONNER 5000A Operation ManualRon CarlsonNo ratings yet
- Speed Control of Three-Phase Induction Motor Using Sinusoidal Pulse Width ModulationDocument37 pagesSpeed Control of Three-Phase Induction Motor Using Sinusoidal Pulse Width ModulationRavi KumarNo ratings yet
- User 2/12/2020: Designed by Checked by Approved by Date DateDocument1 pageUser 2/12/2020: Designed by Checked by Approved by Date DatePoyaNo ratings yet
- DIMER E - Catalogue O Rings - EN PDFDocument43 pagesDIMER E - Catalogue O Rings - EN PDFPoyaNo ratings yet
- Screen Upper Chute JackDocument1 pageScreen Upper Chute JackPoyaNo ratings yet
- Wagon Out Wagon in Wagon in Reduce SpeedDocument1 pageWagon Out Wagon in Wagon in Reduce SpeedPoyaNo ratings yet
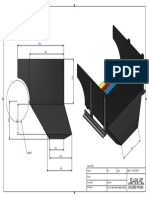
- Chute Hopper (New) - 02-DrawingsDocument1 pageChute Hopper (New) - 02-DrawingsPoyaNo ratings yet
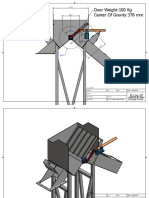
- Door Weight:100 KG Center of Gravity:376 MM: Crusher PayamDocument2 pagesDoor Weight:100 KG Center of Gravity:376 MM: Crusher PayamPoyaNo ratings yet
- 17Chute-New Version02Document3 pages17Chute-New Version02PoyaNo ratings yet
- JackDocument1 pageJackPoyaNo ratings yet
- Pump IranDocument108 pagesPump IranPoyaNo ratings yet
- Daido Chain CatalogDocument147 pagesDaido Chain CatalogAmanda Rezende100% (1)
- Progressive Cavity Pump F Series - Model N: Technical CharacteristicsDocument4 pagesProgressive Cavity Pump F Series - Model N: Technical CharacteristicsPoyaNo ratings yet
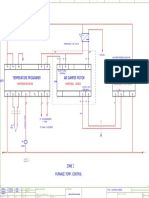
- Temperature Programer Air Damper Motor: HANYOUNG NP/100-00 Honeywell N20010 Hanyoung: Mp3-4-Dv-NDocument1 pageTemperature Programer Air Damper Motor: HANYOUNG NP/100-00 Honeywell N20010 Hanyoung: Mp3-4-Dv-NPoyaNo ratings yet
- Maximum Water Flow CapacitiesDocument5 pagesMaximum Water Flow CapacitiesPoyaNo ratings yet
- GWPD8Document12 pagesGWPD8PoyaNo ratings yet
- 1 Project Description 3 Customer: Ed. DWG NO.: 97.07.ELEC Standard Date 10/28/2018Document1 page1 Project Description 3 Customer: Ed. DWG NO.: 97.07.ELEC Standard Date 10/28/2018PoyaNo ratings yet
- Main Control SwitchDocument1 pageMain Control SwitchPoyaNo ratings yet
- Burner 1 Burner 2 Burner 3 Burner 4: 27 28 N PE 29 27 30 N PE 31 27 32 N PE 33 27 34 N PE 35Document1 pageBurner 1 Burner 2 Burner 3 Burner 4: 27 28 N PE 29 27 30 N PE 31 27 32 N PE 33 27 34 N PE 35PoyaNo ratings yet
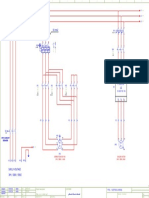
- Project Description 2 Customer: Combustion Air Fan 3PH / 380V / 11KW Wagon Motor 3PH / 380V /3KWDocument1 pageProject Description 2 Customer: Combustion Air Fan 3PH / 380V / 11KW Wagon Motor 3PH / 380V /3KWPoyaNo ratings yet
- Zone 2 (Burner 3&4) : Burner Control Unit Burner Control UnitDocument1 pageZone 2 (Burner 3&4) : Burner Control Unit Burner Control UnitPoyaNo ratings yet
- Alarm Accept: 10 Project Description 12 CustomerDocument1 pageAlarm Accept: 10 Project Description 12 CustomerPoyaNo ratings yet
- Zone 2 (Burner 3&4) : Burner Control Unit Burner Control UnitDocument1 pageZone 2 (Burner 3&4) : Burner Control Unit Burner Control UnitPoyaNo ratings yet
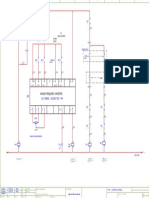
- Wagon Frequency Inverter 1FI: IN Reduce SpeedDocument1 pageWagon Frequency Inverter 1FI: IN Reduce SpeedPoyaNo ratings yet
- Alarm Monitoring: 11 Project Description CustomerDocument1 pageAlarm Monitoring: 11 Project Description CustomerPoyaNo ratings yet
- Zone 2 (Burner 3&4) : Burner Control Unit Burner Control UnitDocument1 pageZone 2 (Burner 3&4) : Burner Control Unit Burner Control UnitPoyaNo ratings yet
- Graphic Temp. RecorderDocument1 pageGraphic Temp. RecorderPoyaNo ratings yet
- Non-Spring Return Direct-Coupled Damper Actuators For Modulating and Floating / 2-Position ControlDocument8 pagesNon-Spring Return Direct-Coupled Damper Actuators For Modulating and Floating / 2-Position ControlPoyaNo ratings yet
- Mf0101e MP3 MP6Document6 pagesMf0101e MP3 MP6PoyaNo ratings yet
- 2011 A Novel Punch Design Approach With ProgressiveDocument9 pages2011 A Novel Punch Design Approach With ProgressivesudhakarNo ratings yet
- Amarok 2011 8-Speed Automatic Gearbox 0CMDocument69 pagesAmarok 2011 8-Speed Automatic Gearbox 0CMManuel Gonzales0% (1)
- State and Explain The Classification of Connections in Steel StructuresDocument8 pagesState and Explain The Classification of Connections in Steel StructuresSanjana BhandiwadNo ratings yet
- Aws D1.1Document7 pagesAws D1.1jacquesmayol100% (1)
- 1-Ep-Snt 65-250Document4 pages1-Ep-Snt 65-250Abdullah RamadanNo ratings yet
- Wear Sleeves 6403 - ENDocument44 pagesWear Sleeves 6403 - ENpaulpopNo ratings yet
- BKSC Quality - Audit - Check-Sheet - For - Wagon - DepotDocument31 pagesBKSC Quality - Audit - Check-Sheet - For - Wagon - Depotabhimanyutiwari1234No ratings yet
- Suhail Ahmed Bengaluru - Bangalore 2.00 YrsDocument3 pagesSuhail Ahmed Bengaluru - Bangalore 2.00 YrsVelan PalaniNo ratings yet
- Effect of Chevron Angle and Surface Roughness On Thermal Performance of Single Phase Water Flow in A Plate Heat ExchangerDocument9 pagesEffect of Chevron Angle and Surface Roughness On Thermal Performance of Single Phase Water Flow in A Plate Heat ExchangerAkash AhmedNo ratings yet
- Flying Cart Hovercraft PlansDocument8 pagesFlying Cart Hovercraft PlansJimNo ratings yet
- DIN 3016 P-Clip Form DDocument2 pagesDIN 3016 P-Clip Form Dsrushti100% (1)
- NDT Instruction Eddy Current - IRS - Rev 001Document5 pagesNDT Instruction Eddy Current - IRS - Rev 001haoues23No ratings yet
- Unified Development of Lateral Directional Departure CriteriaDocument5 pagesUnified Development of Lateral Directional Departure CriteriaVirginTebowNo ratings yet
- Our Fire Pumps Are Peerless: - Full Range ExpertiseDocument9 pagesOur Fire Pumps Are Peerless: - Full Range ExpertiseImran AzizNo ratings yet
- Climatronic (AKL+AEH)Document8 pagesClimatronic (AKL+AEH)Istina GubitnikNo ratings yet
- Man 2258Document47 pagesMan 2258Eric PierceNo ratings yet
- Five-Speed Automatic Gearbox With Tiptronic (01V)Document6 pagesFive-Speed Automatic Gearbox With Tiptronic (01V)FSR1407No ratings yet
- Maintenance Interval Schedule 938HDocument4 pagesMaintenance Interval Schedule 938HForesight MisrNo ratings yet
- ME322 Heat TransferDocument2 pagesME322 Heat TransferRagesh DuduNo ratings yet
- Arel Concrete-Reinforcement Bond in Different Concrete ClassesDocument6 pagesArel Concrete-Reinforcement Bond in Different Concrete ClassesRazanNo ratings yet
- Parr 239 MDocument32 pagesParr 239 MChau MaiNo ratings yet
- Gearbox Vibration - Fact or FictionDocument9 pagesGearbox Vibration - Fact or Fictioneko bagus sunaryoNo ratings yet
- Din Suntech 20 21Document20 pagesDin Suntech 20 21ARKA technocorpNo ratings yet
- ThermocoupleDocument63 pagesThermocoupleAnonymous HFIQgANMQNo ratings yet