Download as pdf or txt
You might also like
- UR5 Inverse KinematicsDocument8 pagesUR5 Inverse KinematicsLuis Gerardo CarvajalNo ratings yet
- 2 Pole Synchronous Generator - Matlab QuestionDocument3 pages2 Pole Synchronous Generator - Matlab Questionahmedfhd10% (2)
- Asmt E2533Document47 pagesAsmt E2533krperz100% (1)
- Design Harmo Robot (English Ver.)Document40 pagesDesign Harmo Robot (English Ver.)Hiếu DươngNo ratings yet
- Speech & Language Therapy in Practice, Spring 2002Document32 pagesSpeech & Language Therapy in Practice, Spring 2002Speech & Language Therapy in PracticeNo ratings yet
- Maximillien de Lafayette PDFDocument43 pagesMaximillien de Lafayette PDFAmeli Apuy80% (10)
- 04 Forward KinematicsDocument14 pages04 Forward KinematicssolteanNo ratings yet
- Lecture 10 D.K.Analysis 2Document34 pagesLecture 10 D.K.Analysis 2Krishna KulkarniNo ratings yet
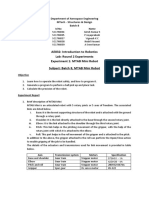
- AE832: Introduction To Robotics Lab: Round 2 Experiments Experiment 1: MTAB Mini Robot Subject: Batch 8, MTAB Mini RobotDocument5 pagesAE832: Introduction To Robotics Lab: Round 2 Experiments Experiment 1: MTAB Mini Robot Subject: Batch 8, MTAB Mini RobotPravallika Yadav100% (1)
- DH RulesDocument69 pagesDH RulesHoney RathoreNo ratings yet
- Kinematics Part 3Document22 pagesKinematics Part 3fatinNo ratings yet
- Thesis Report - Date: April 5th 2018 Forward and Inverse Kinematics of 3 Revolution-Joint Robotic ArmDocument7 pagesThesis Report - Date: April 5th 2018 Forward and Inverse Kinematics of 3 Revolution-Joint Robotic ArmVienNgocQuangNo ratings yet
- Robotics1 MidTerm 2020-21 20.11.20Document12 pagesRobotics1 MidTerm 2020-21 20.11.20SHUBHAM MALLNo ratings yet
- Lecture - 3 - ExamplesDocument21 pagesLecture - 3 - ExamplesHaronicleNo ratings yet
- Mid Sem Papaer - RoboticsDocument2 pagesMid Sem Papaer - RoboticsshubhamNo ratings yet
- Introduction To Robotics (CS223A) Homework #3 Solution (Winter 2007/2008)Document5 pagesIntroduction To Robotics (CS223A) Homework #3 Solution (Winter 2007/2008)علي كامل الاسديNo ratings yet
- Lec08 2015Document42 pagesLec08 2015Abdelmajid AbouloifaNo ratings yet
- EECS4421Z: Introduction To Robotics Sample Exam QuestionsDocument7 pagesEECS4421Z: Introduction To Robotics Sample Exam QuestionsMooeez BellaamineNo ratings yet
- ComputerGraphics 3D Part2Document100 pagesComputerGraphics 3D Part2api-3799599No ratings yet
- Department of Electronics and Telecommunication Engineering: R T R T TDocument3 pagesDepartment of Electronics and Telecommunication Engineering: R T R T TSurangaGNo ratings yet
- Denavit-Hartenberg Parameters of A 3dof Robotic Arm: by Javier Barba Flores,, 2016-2017Document2 pagesDenavit-Hartenberg Parameters of A 3dof Robotic Arm: by Javier Barba Flores,, 2016-2017Izzat AzmanNo ratings yet
- Assignment 3Document5 pagesAssignment 3Kalpit AgarwalNo ratings yet
- Angular Velocity - Rigid Body - Intuitive Approach: Sin - P - T - PDocument9 pagesAngular Velocity - Rigid Body - Intuitive Approach: Sin - P - T - PKeith wongNo ratings yet
- Rob_lect5Document23 pagesRob_lect5Ahmed ElkhateebNo ratings yet
- Tutorial 5-8Document26 pagesTutorial 5-8Adil RasheedNo ratings yet
- FiguresDocument343 pagesFiguresErica RosellaNo ratings yet
- Study of Feasibility and Exactness For The Mathematical "Semirigid" Nonlinear Model of I. Nikolaev, E. N. Antoshkina 2012 PDFDocument9 pagesStudy of Feasibility and Exactness For The Mathematical "Semirigid" Nonlinear Model of I. Nikolaev, E. N. Antoshkina 2012 PDFMariela TisseraNo ratings yet
- Robot DesignDocument37 pagesRobot DesignengineerNo ratings yet
- Arbitary Rotation ProofDocument3 pagesArbitary Rotation Proofmohamed2010526No ratings yet
- Model, Motion Planning and Control of UR10: Universit e de Montpellier - LIRMMDocument15 pagesModel, Motion Planning and Control of UR10: Universit e de Montpellier - LIRMMZakaria Elhabib BOUZITNo ratings yet
- RD EX1 Kinematics SolutionDocument18 pagesRD EX1 Kinematics Solutiondanitranoster8512No ratings yet
- Inverse Kinematics-3Document51 pagesInverse Kinematics-3Nahom AlemnewNo ratings yet
- Stability of Linear Systems: 11.1 Some DefinitionsDocument8 pagesStability of Linear Systems: 11.1 Some DefinitionsHarshit YadavNo ratings yet
- Ur5 Inverse KinematicsDocument9 pagesUr5 Inverse Kinematicsthanhvu1810aNo ratings yet
- Robotics I: X X Z X Z ZDocument8 pagesRobotics I: X X Z X Z Zasalifew belachewNo ratings yet
- AngleDocument7 pagesAngleNguyễnTúSơnNo ratings yet
- AngleDocument7 pagesAngleNguyễnTúSơnNo ratings yet
- Assignment 3Document6 pagesAssignment 3amayrakhurrana18No ratings yet
- QuizDocument4 pagesQuizNitesh ParmarNo ratings yet
- Generating and Processing Random SignalsDocument56 pagesGenerating and Processing Random SignalssamfgNo ratings yet
- CamprofileDocument3 pagesCamprofilePatrick OguamaNo ratings yet
- Chap 7 - Worm DriveDocument33 pagesChap 7 - Worm DriveHuỳnh Nguyễn Thiên TânNo ratings yet
- Minggu 2 Dan 3 - Stability PDFDocument43 pagesMinggu 2 Dan 3 - Stability PDFFahmi RizalNo ratings yet
- Kvrgic - DimicDocument7 pagesKvrgic - DimicZoran DimicNo ratings yet
- (2.1250) (2.2500) Inch: TS Type (53.975) (57.150) MMDocument1 page(2.1250) (2.2500) Inch: TS Type (53.975) (57.150) MMJeferson Avila QuirogaNo ratings yet
- BE Aero SujetDocument9 pagesBE Aero Sujetdjefki.alexisn7No ratings yet
- Robotics Assignment TwoDocument19 pagesRobotics Assignment Twomisgana etichaNo ratings yet
- CH 6 Digital Elevation Model: Bin YUDocument61 pagesCH 6 Digital Elevation Model: Bin YUgamilNo ratings yet
- Sh2 P Introd To Robot Kinematics 2016Document4 pagesSh2 P Introd To Robot Kinematics 2016mahmoud mohammedNo ratings yet
- Experimental Verification of Kinematic Model of Scorbot Er-4U Robot ManipulatorDocument12 pagesExperimental Verification of Kinematic Model of Scorbot Er-4U Robot ManipulatorTJPRC PublicationsNo ratings yet
- Robotics1 Homework1!10!11Document6 pagesRobotics1 Homework1!10!11Ammar BendjeddouNo ratings yet
- 4BCh07 (Basic Properties of Circles 2)Document28 pages4BCh07 (Basic Properties of Circles 2)api-19856023No ratings yet
- METR4202 - Robotics Tutorial 2 - Week 3: Homogeneous Coordinates Solutions & CommentaryDocument5 pagesMETR4202 - Robotics Tutorial 2 - Week 3: Homogeneous Coordinates Solutions & CommentaryengrodeNo ratings yet
- Spline Interpolation Method: Major: All Engineering Majors Authors: Autar Kaw, Jai PaulDocument42 pagesSpline Interpolation Method: Major: All Engineering Majors Authors: Autar Kaw, Jai PaulMuqaddas SarwarNo ratings yet
- Cambodia - Arpartment Composite Beam Analysis Q18-050 Son Tu Nguyen ASD Astm A36 V120x120x11 315 1 y CX TDocument3 pagesCambodia - Arpartment Composite Beam Analysis Q18-050 Son Tu Nguyen ASD Astm A36 V120x120x11 315 1 y CX TNguyễnTúSơnNo ratings yet
- Jounal Published PaperDocument13 pagesJounal Published PaperVaishnavi DhayapuleNo ratings yet
- Chapter 3 C DH Representation For Robotic ManipulatorsDocument88 pagesChapter 3 C DH Representation For Robotic ManipulatorsCharlton S.Inao100% (1)
- PSDC 29Document25 pagesPSDC 29Dinesh ShettyNo ratings yet
- Course Material (Students)Document46 pagesCourse Material (Students)Lamjed AouaniNo ratings yet
- D2 Problem Jacobian ProposalDocument14 pagesD2 Problem Jacobian ProposalJon EscoNo ratings yet
- Inverse Kinematics PPT (Pak Toni)Document14 pagesInverse Kinematics PPT (Pak Toni)herawanadifNo ratings yet
- The Spectral Theory of Toeplitz Operators. (AM-99), Volume 99From EverandThe Spectral Theory of Toeplitz Operators. (AM-99), Volume 99No ratings yet
- Robot Manipulators: Modeling, Performance Analysis and ControlFrom EverandRobot Manipulators: Modeling, Performance Analysis and ControlNo ratings yet
- 03 Translation MatricesDocument8 pages03 Translation MatricessolteanNo ratings yet
- 04 Forward KinematicsDocument14 pages04 Forward KinematicssolteanNo ratings yet
- Matlab Review: Becoming Familiar With MATLABDocument13 pagesMatlab Review: Becoming Familiar With MATLABsolteanNo ratings yet
- ECE 761 Advanced Controls: Robotics (3cr) : Course InformationDocument3 pagesECE 761 Advanced Controls: Robotics (3cr) : Course InformationsolteanNo ratings yet
- 02 Rotation MatricesDocument13 pages02 Rotation MatricessolteanNo ratings yet
- ECE 415, Fall 2003 Problem Set #1: Issued: September 2nd Due: September 9thDocument2 pagesECE 415, Fall 2003 Problem Set #1: Issued: September 2nd Due: September 9thsolteanNo ratings yet
- Adaptive: Control For Machine ToolsDocument27 pagesAdaptive: Control For Machine ToolssolteanNo ratings yet
- CNC Machine & Its ComponentsDocument36 pagesCNC Machine & Its ComponentssolteanNo ratings yet
- Automation of Manufacturing ProcessesDocument34 pagesAutomation of Manufacturing ProcessessolteanNo ratings yet
- CNC Hardware: Arvind DeshpandeDocument52 pagesCNC Hardware: Arvind DeshpandesolteanNo ratings yet
- Learning SimulinkDocument572 pagesLearning Simulinkmarrakamasutras100% (28)
- App 1934015024Document358 pagesApp 1934015024robotics154No ratings yet
- VASTU-SHASHTRA - 1 - Architecture Seminar TopicsDocument3 pagesVASTU-SHASHTRA - 1 - Architecture Seminar TopicsNupur BhadraNo ratings yet
- CIMAP Charges For AnalysisDocument11 pagesCIMAP Charges For AnalysisSaloman RaviNo ratings yet
- Prince Ea-I Just Sued The School SystemDocument3 pagesPrince Ea-I Just Sued The School SystemTizioNo ratings yet
- PPT - Polymers-Final-3-161225131244Document37 pagesPPT - Polymers-Final-3-161225131244mahaNo ratings yet
- NFRCS Therm 5.2-July 06versionDocument302 pagesNFRCS Therm 5.2-July 06versionBojan Bjelajac100% (1)
- Bloom Shinran PDFDocument13 pagesBloom Shinran PDFArthurNo ratings yet
- SILENT HILL 4: Introspection (Game Novelization)Document273 pagesSILENT HILL 4: Introspection (Game Novelization)Donnie CorvalánNo ratings yet
- Eng Taas-08 Talmud Eser SefirotDocument63 pagesEng Taas-08 Talmud Eser Sefirotne0h_16_196547097No ratings yet
- Chapter 4.newDocument63 pagesChapter 4.newRoy CabarlesNo ratings yet
- Final 3.2sedimentary RocksDocument49 pagesFinal 3.2sedimentary RocksErich IsnainNo ratings yet
- 2 - Std'03 - MathsDocument203 pages2 - Std'03 - MathsMohamedMoideenNagoorMeeranNo ratings yet
- Ae 191 Lesson 1Document14 pagesAe 191 Lesson 1Erna DavidNo ratings yet
- Logistics and Transportation ServicesDocument2 pagesLogistics and Transportation ServicesEllatroy AycoNo ratings yet
- The Iconic Influence of Queen Elizabeth IIDocument2 pagesThe Iconic Influence of Queen Elizabeth IIpatriciasusckind_574No ratings yet
- Yazykovoy Material Po TemamDocument83 pagesYazykovoy Material Po TemamNelly NelNo ratings yet
- Shaheed Suhrawardy Medical College HospitalDocument3 pagesShaheed Suhrawardy Medical College HospitalDr. Mohammad Nazrul IslamNo ratings yet
- 02 WholeDocument290 pages02 WholeOOnaSavaNo ratings yet
- Medical Nutrition Therapy For Accessory OrgansDocument83 pagesMedical Nutrition Therapy For Accessory OrgansIan MendezNo ratings yet
- EPC Saur Energy InternationalDocument3 pagesEPC Saur Energy InternationalNarendra PatelNo ratings yet
- Tool 20-05-21Document13 pagesTool 20-05-21naga maniNo ratings yet
- Know Wessel WitthuhnDocument10 pagesKnow Wessel WitthuhnWesselWitthuhnNo ratings yet
- Goodle Drive Tutorial # 2Document4 pagesGoodle Drive Tutorial # 2JOEL P. RODRIGUEZNo ratings yet
- Sustainable DevelopmentDocument11 pagesSustainable DevelopmentrcayNo ratings yet
- Opmanager Plus Product Information Sheet 1Document49 pagesOpmanager Plus Product Information Sheet 1Nghiêm Sỹ Tâm PhươngNo ratings yet
- Biography of Francisco ArcellanaDocument4 pagesBiography of Francisco ArcellanabooboothefoolNo ratings yet
- New Holland LB90B, LB95B, LB110B, LB115B Loader Backhoe Service Repair ManualDocument21 pagesNew Holland LB90B, LB95B, LB110B, LB115B Loader Backhoe Service Repair ManualggjjjjotonesNo ratings yet
- t2174-360-03 SG-Ins Lec ENDocument318 pagest2174-360-03 SG-Ins Lec ENTaru LucianNo ratings yet