Download as pdf or txt
You might also like
- Airship Combat System Chapters 1 & 2 - The HomebreweryDocument25 pagesAirship Combat System Chapters 1 & 2 - The HomebreweryJeffery Osvold100% (3)
- Study of a reluctance magnetic gearbox for energy storage system applicationFrom EverandStudy of a reluctance magnetic gearbox for energy storage system applicationRating: 1 out of 5 stars1/5 (1)
- Introduction To Industrial DrivesDocument70 pagesIntroduction To Industrial Drivesvnyshreyas100% (4)
- 5-MAN Diesel 32-40 Twin Medium Speed EngineDocument218 pages5-MAN Diesel 32-40 Twin Medium Speed Engineİsmail YazıcıNo ratings yet
- Electro3 Week 4Document13 pagesElectro3 Week 4ivan cajugaoNo ratings yet
- ELL 303 - Presentation 1Document21 pagesELL 303 - Presentation 1SwapnilJiwaneNo ratings yet
- Diesel Electric Systems For Offshore Vessels: Introduction and SummaryDocument9 pagesDiesel Electric Systems For Offshore Vessels: Introduction and Summaryjoaofelipe.msNo ratings yet
- Battery SizingDocument41 pagesBattery Sizingअंकित अरोड़ा100% (1)
- Heising Et Al-2011-Optimised Energy-Efficient Drive System For Ship PropulsionDocument4 pagesHeising Et Al-2011-Optimised Energy-Efficient Drive System For Ship PropulsionEleftherios DeNo ratings yet
- Electric - Propulsion Imtech DieselElSys Rev05Document10 pagesElectric - Propulsion Imtech DieselElSys Rev05moiseian100% (1)
- Ed Mod1Document41 pagesEd Mod1AlphaBravoNo ratings yet
- Drives Acdc - CNCDocument42 pagesDrives Acdc - CNCShami KunalNo ratings yet
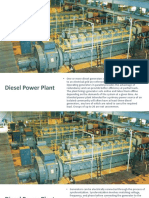
- Diesel Power PlantDocument45 pagesDiesel Power PlantNathanielle AlvaradoNo ratings yet
- DC Hybrid Marine Electrical Distribution: Its Benefits and Other Technical CondsiderationsDocument27 pagesDC Hybrid Marine Electrical Distribution: Its Benefits and Other Technical CondsiderationsAMARGEETH P MNo ratings yet
- CompressorDocument178 pagesCompressor332-65 Nitin ShindeNo ratings yet
- Generation and Distribution of ElectricityDocument38 pagesGeneration and Distribution of ElectricityAlp ŞENERNo ratings yet
- A Diesel Generator Is The Combination of A Diesel Engine With An Electric GeneratorDocument9 pagesA Diesel Generator Is The Combination of A Diesel Engine With An Electric GeneratorHamis RamadhaniNo ratings yet
- How To Size DG Set - CumminsDocument4 pagesHow To Size DG Set - CumminsNalin KumarNo ratings yet
- Unit 3Document7 pagesUnit 3Alex CristianNo ratings yet
- Electric Traction PDFDocument54 pagesElectric Traction PDFLalit ChaudharyNo ratings yet
- Unit 3 NotesDocument17 pagesUnit 3 Notesanks202No ratings yet
- Types of DriveDocument13 pagesTypes of DrivecoolrajeeeNo ratings yet
- Generation and Distribution of ElectricityDocument38 pagesGeneration and Distribution of ElectricityAlp ŞENER100% (2)
- Module 2.1Document33 pagesModule 2.1RanjanaNo ratings yet
- Alternate Energy Sources EVsDocument28 pagesAlternate Energy Sources EVsirfan_nitNo ratings yet
- High All Electric Ship ConceptDocument29 pagesHigh All Electric Ship Conceptoladokunsulaiman100% (2)
- The Ship's Electrical Network, Engine Control and AutomationDocument6 pagesThe Ship's Electrical Network, Engine Control and AutomationJohn SmithNo ratings yet
- 2001 DE Propulsion TheoryDocument33 pages2001 DE Propulsion TheoryFrancis TanNo ratings yet
- Wind Diesel Integration Ian Baring Gould NRELDocument51 pagesWind Diesel Integration Ian Baring Gould NRELtitan2106No ratings yet
- Hitachi Regen White Paper FinalDocument4 pagesHitachi Regen White Paper FinalAhmedNo ratings yet
- Electric Traction: LocomotionDocument29 pagesElectric Traction: LocomotionRaja SekaranNo ratings yet
- Electric Traction: BY Viswanath 267Document22 pagesElectric Traction: BY Viswanath 267Viswanatha SharmaNo ratings yet
- Shymgen System - Optimizing The Performance of Shaft Generator and Drive Train On Fishing VesselsDocument6 pagesShymgen System - Optimizing The Performance of Shaft Generator and Drive Train On Fishing VesselsADRIANSF1No ratings yet
- Unit 5.3-Types and Range of Hybrid SystemDocument2 pagesUnit 5.3-Types and Range of Hybrid SystemSELVAKUMAR RBNo ratings yet
- Wind Energy Conversion SystemsDocument4 pagesWind Energy Conversion SystemsRudra palNo ratings yet
- N.B.K.R. Institute of Science & Technology (Autonomous) Affiliated To JNTUA, AnantapuramuDocument42 pagesN.B.K.R. Institute of Science & Technology (Autonomous) Affiliated To JNTUA, AnantapuramuMunvar AliNo ratings yet
- All Electric ShipDocument88 pagesAll Electric ShipOladokun Sulaiman Olanrewaju100% (10)
- Power System Structure and DeregulationDocument38 pagesPower System Structure and DeregulationHarney Lee ArancesNo ratings yet
- 129 - Ent 204Document12 pages129 - Ent 204Polutan ElvinNo ratings yet
- Combined Operation of Different Power PlantsDocument12 pagesCombined Operation of Different Power PlantsAthul AloysiusNo ratings yet
- Electric Traction SystemDocument23 pagesElectric Traction SystemAniket LikharNo ratings yet
- TractionDocument18 pagesTractionromanreings1874No ratings yet
- Sizing of Generator SetsDocument4 pagesSizing of Generator Setsjose angel camara santosNo ratings yet
- EEE 3003 Power System Engineering: Meera P. S. SELECT, VIT ChennaiDocument30 pagesEEE 3003 Power System Engineering: Meera P. S. SELECT, VIT ChennaiSouvik DattaNo ratings yet
- SUMMARYDocument11 pagesSUMMARYCyber-Mohd Salah ShotyNo ratings yet
- Introduction To Electric Drives: by Dr. P.K Biswas Asst. Professor Department of Electrical Engineering NIT MizoramDocument21 pagesIntroduction To Electric Drives: by Dr. P.K Biswas Asst. Professor Department of Electrical Engineering NIT MizoramtoshaliNo ratings yet
- Diesel GeneratorDocument15 pagesDiesel Generatorkarthik raju0% (1)
- Electrical Drives and Controls: Study World College of EngineeringDocument44 pagesElectrical Drives and Controls: Study World College of EngineeringPranesh KaNo ratings yet
- SeminarDocument15 pagesSeminarAkhil GuliaNo ratings yet
- Grid Integration Issues On Power SystemDocument20 pagesGrid Integration Issues On Power Systemsoumen goraiNo ratings yet
- Lec2 Characteristics of Railroad Locomotives & TrainsDocument35 pagesLec2 Characteristics of Railroad Locomotives & Trainsم.علي سعدي الجنابيNo ratings yet
- 1.1 IntroductionDocument15 pages1.1 IntroductionAlphaBravoNo ratings yet
- Jepretan Layar 2023-05-25 Pada 18.01.17Document27 pagesJepretan Layar 2023-05-25 Pada 18.01.17Jhason ChristNo ratings yet
- Power Marine ManagementDocument4 pagesPower Marine ManagementSyby SibelNo ratings yet
- Train Lighting System and Power Generation .Document24 pagesTrain Lighting System and Power Generation .sushmaNo ratings yet
- DOMDocument14 pagesDOMGAURAV BAGHELNo ratings yet
- Wind/Diesel Power Systems Basics and Examples: E. Ian Baring-GouldDocument58 pagesWind/Diesel Power Systems Basics and Examples: E. Ian Baring-GouldHoaiPhuongDINHNo ratings yet
- DC Wind SystemsDocument12 pagesDC Wind SystemszabihematyNo ratings yet
- All Electric Ship++++Document88 pagesAll Electric Ship++++Roga29100% (1)
- Methods for Increasing the Quality and Reliability of Power System Using FACTS DevicesFrom EverandMethods for Increasing the Quality and Reliability of Power System Using FACTS DevicesNo ratings yet
- Anodos ToberaDocument1 pageAnodos ToberaJuan Cruz TauterysNo ratings yet
- Capacidades y Dimensionamiento de Bombas PDFDocument4 pagesCapacidades y Dimensionamiento de Bombas PDFJuan Cruz TauterysNo ratings yet
- Aalborg MX PDFDocument3 pagesAalborg MX PDFJuan Cruz TauterysNo ratings yet
- PPN 2018 - Clase 19 - Calderas Parte 3 PDFDocument43 pagesPPN 2018 - Clase 19 - Calderas Parte 3 PDFJuan Cruz TauterysNo ratings yet
- PPN 2018 - Clase 15 - Governors MANDocument38 pagesPPN 2018 - Clase 15 - Governors MANJuan Cruz TauterysNo ratings yet
- ABC of Motors 3rd Edition - Siemens PDFDocument91 pagesABC of Motors 3rd Edition - Siemens PDFJuan Cruz TauterysNo ratings yet
- Markus FelchnerDocument2 pagesMarkus FelchnerJuan Cruz TauterysNo ratings yet
- Ektank T28 18600 DWTDocument2 pagesEktank T28 18600 DWTJuan Cruz TauterysNo ratings yet
- Yanmar Marine Engine Under 1000 HPDocument22 pagesYanmar Marine Engine Under 1000 HPHendriyana Rizky100% (2)
- Emship Flyer PDFDocument2 pagesEmship Flyer PDFduplexprabuNo ratings yet
- Gragen - Offshore IndustryDocument30 pagesGragen - Offshore Industrywaleedyehia100% (1)
- Meet Deliverable 19Document48 pagesMeet Deliverable 19Burzis PatelNo ratings yet
- Modern Marine Propulsion GearingDocument6 pagesModern Marine Propulsion GearingMerrel RossNo ratings yet
- Brochure o e w50df PDFDocument2 pagesBrochure o e w50df PDFRonald Bienemi PaezNo ratings yet
- "D.V. Star Fighter" Ship Main DetailsDocument2 pages"D.V. Star Fighter" Ship Main DetailsAnirudh M. MaheshwariNo ratings yet
- Redundant Propulsion: ShipsDocument8 pagesRedundant Propulsion: ShipsLyubomir LazarovNo ratings yet
- Appendices Tables 1Document35 pagesAppendices Tables 1senyorakathNo ratings yet
- Propulsion Trends in Container VesselsDocument25 pagesPropulsion Trends in Container VesselsMANIU RADU-GEORGIANNo ratings yet
- 2014 - Voith-Turbo POGDocument21 pages2014 - Voith-Turbo POGAri BinukoNo ratings yet
- Ship Particular Blue Marlin 02Document2 pagesShip Particular Blue Marlin 02Hermawan NathanaelNo ratings yet
- HIK Q88 JUNE22 v.5Document8 pagesHIK Q88 JUNE22 v.5Juan P. RodriguezNo ratings yet
- Hijau SegarDocument11 pagesHijau SegarSubastianNo ratings yet
- ABS HistoryDocument172 pagesABS Historyap1948No ratings yet
- SOx ReductionDocument45 pagesSOx ReductionYahia Abou-shoshaNo ratings yet
- MaritimeProfessional 2019 11 PDFDocument58 pagesMaritimeProfessional 2019 11 PDFLuis De GraciaNo ratings yet
- DEC OSS Business IntroductionDocument28 pagesDEC OSS Business Introductionamr kouranyNo ratings yet
- 3-Steyr Operation and Maintenance ManualDocument120 pages3-Steyr Operation and Maintenance ManualIzzat Khan Mohd IsninNo ratings yet
- Types of EngineDocument28 pagesTypes of EnginekartikSN100% (1)
- GG 05 09 2012 200 PDFDocument4 pagesGG 05 09 2012 200 PDFpapaki2100% (1)
- National Apprenticeship Training Scheme (NATS) Aspirations DetailsDocument1 pageNational Apprenticeship Training Scheme (NATS) Aspirations DetailsArjun KrishnaNo ratings yet
- Aplikacija ErDocument3 pagesAplikacija ErjasnosonceNo ratings yet
- LSV Replenisher 16000: Global ISO Tank LogisticsDocument4 pagesLSV Replenisher 16000: Global ISO Tank LogisticsYanyan2009No ratings yet
- Utility Vessel: General Information ClassificationDocument3 pagesUtility Vessel: General Information ClassificationWan HaiNo ratings yet
- BM 19 - Ship ParticularDocument1 pageBM 19 - Ship Particulariankun .93No ratings yet
- Doqueve Majestic 390 - 2000 BFDocument10 pagesDoqueve Majestic 390 - 2000 BFtestNo ratings yet
- Task 1.33 - 5Document101 pagesTask 1.33 - 5Jackdan12No ratings yet