Download as pdf or txt
You might also like
- Auto Idle System Trouble Shooting: Kubota Construction MachineryDocument16 pagesAuto Idle System Trouble Shooting: Kubota Construction MachineryYadi100% (6)
- EMT3-C10186 Manual (Rev. 1) W E-Stop and Throttle Pot (71610)Document17 pagesEMT3-C10186 Manual (Rev. 1) W E-Stop and Throttle Pot (71610)Matias Contreras Köbrich100% (2)
- Emc Donate Version TutorialDocument20 pagesEmc Donate Version TutorialPIETREK PRO100% (1)
- CT100-NT05 Service Manual PDFDocument93 pagesCT100-NT05 Service Manual PDFDwane DuncanNo ratings yet
- Eurocargo SCR InstructionDocument229 pagesEurocargo SCR InstructionВиктор Сабов100% (1)
- Manual SpeedcontrolDocument2 pagesManual SpeedcontrolВиктор СабовNo ratings yet
- MAGNAVALVE Mod ACDocument25 pagesMAGNAVALVE Mod ACdahora13No ratings yet
- Arduino DC Motor ControlDocument4 pagesArduino DC Motor ControlKathryn WorkmanNo ratings yet
- Epq96 2 Data Sheet 4921240364 UkDocument8 pagesEpq96 2 Data Sheet 4921240364 UkEdwin PinzonNo ratings yet
- ECU ListDocument4 pagesECU ListS M NaveedNo ratings yet
- Overview of The Servo SystemDocument8 pagesOverview of The Servo Systemuday1592No ratings yet
- Tip23 e PDFDocument4 pagesTip23 e PDFThanh BaronNo ratings yet
- IC693APU302Document3 pagesIC693APU302raulmoscoso3No ratings yet
- Excitation System - 11.05.2011Document52 pagesExcitation System - 11.05.2011vijayrajuNo ratings yet
- Stepcontrolhy EngDocument10 pagesStepcontrolhy Engdron572No ratings yet
- DC Motor Bidirectional Speed Control Using PWM PDFDocument5 pagesDC Motor Bidirectional Speed Control Using PWM PDFM Rameez Ur Rehman100% (1)
- 3 Axis TB6560 CNC Driver Board Users ManualDocument13 pages3 Axis TB6560 CNC Driver Board Users ManualJoão Luis Paiva JuniorNo ratings yet
- Altivar 28 Telemecanique: Variateurs de Vitesse Pour Moteurs AsynchronesDocument49 pagesAltivar 28 Telemecanique: Variateurs de Vitesse Pour Moteurs AsynchronesgilamadaNo ratings yet
- Bipolar Stepper Motor Control and Drive With Dedicated IcsDocument7 pagesBipolar Stepper Motor Control and Drive With Dedicated IcskubikNo ratings yet
- Tip22 e PDFDocument6 pagesTip22 e PDFThanh BaronNo ratings yet
- Re95300 2007-12 PDFDocument16 pagesRe95300 2007-12 PDFrenatNo ratings yet
- Interface L298N DC Motor Driver Module with ArduinoDocument16 pagesInterface L298N DC Motor Driver Module with ArduinoKing HowlerNo ratings yet
- SIMOREG 6RA70 DC MASTER Electronics: Speed Control With CEMF FeedbackDocument15 pagesSIMOREG 6RA70 DC MASTER Electronics: Speed Control With CEMF FeedbackMancamiaicuru100% (1)
- TECO E510 Inverter. Quick Start Guide. Step 1. Supply & Motor ConnectionDocument9 pagesTECO E510 Inverter. Quick Start Guide. Step 1. Supply & Motor Connectionتكنو ليفتNo ratings yet
- ATV 11 Technical Manual - EN - Mais AtualDocument61 pagesATV 11 Technical Manual - EN - Mais AtualJéferson de LimaNo ratings yet
- Fast PWM Mode. DC Motor. Servo MotorDocument21 pagesFast PWM Mode. DC Motor. Servo MotorAya Adel Gouma AbdElGaidNo ratings yet
- Program Controller For RCA2/RCA: List of ModelsDocument10 pagesProgram Controller For RCA2/RCA: List of ModelsElectromateNo ratings yet
- Lecture 16Document15 pagesLecture 16Azam KhanNo ratings yet
- AFD ControlDocument20 pagesAFD Controlgertibaj100% (1)
- DC Motor Control Module: User ManualDocument26 pagesDC Motor Control Module: User ManualDavid de Almeida FiorilloNo ratings yet
- EPS With SYMAP PDFDocument14 pagesEPS With SYMAP PDFFranklin AbreuNo ratings yet
- EPS AC Wire Guidance Itens 1.0-5.2Document8 pagesEPS AC Wire Guidance Itens 1.0-5.2Jose SantosNo ratings yet
- Electrical Manual of GSK980TDbDocument18 pagesElectrical Manual of GSK980TDbjavier medinaNo ratings yet
- Description: Deep Sea Electronics PLC Manual StartDocument2 pagesDescription: Deep Sea Electronics PLC Manual StartJoel Khamala KarokiNo ratings yet
- PWM Atmega328Document30 pagesPWM Atmega328JUNIOR700No ratings yet
- Kcm-Iia Instrument Panel For Marine G-Drive Engine: BulletinDocument21 pagesKcm-Iia Instrument Panel For Marine G-Drive Engine: BulletinShanish JobNo ratings yet
- NearZero - Quick Start and Manual - Firmware v2.0Document10 pagesNearZero - Quick Start and Manual - Firmware v2.0Deniz Melek TürkNo ratings yet
- Universidad Nacional de IngenieríaDocument19 pagesUniversidad Nacional de IngenieríasaverfimNo ratings yet
- Variador Yanwa AcerosDocument9 pagesVariador Yanwa Acerosjuan Carlos GonzalezNo ratings yet
- User Manual: HGM6100K Series Genset ControllerDocument30 pagesUser Manual: HGM6100K Series Genset ControllerRODRIGO_RALONo ratings yet
- DHC 100Document12 pagesDHC 100oliverttNo ratings yet
- AMC4030 Motion ControllerDocument9 pagesAMC4030 Motion ControllerShahid SiddiqueNo ratings yet
- Generator ControllerDocument21 pagesGenerator ControllerBrianHazeNo ratings yet
- Driver Capy C11G Cnc4pcDocument19 pagesDriver Capy C11G Cnc4pccastellano_rNo ratings yet
- Regulateur ALPTECDocument15 pagesRegulateur ALPTECCris_eu09No ratings yet
- ACS880-01 Democase: User's ManualDocument16 pagesACS880-01 Democase: User's ManualVoicu MarinNo ratings yet
- Mindy A01Document40 pagesMindy A01mastablastaNo ratings yet
- UHU Servo Controller 300 enDocument13 pagesUHU Servo Controller 300 enZoltán NémetNo ratings yet
- 116 DataDocument2 pages116 DataCamilo DiasNo ratings yet
- Focus Applied Technologies Controller Model Dc5: 5 Generation Eddy Current Dynamometer ControllerDocument48 pagesFocus Applied Technologies Controller Model Dc5: 5 Generation Eddy Current Dynamometer ControllerLeong Hau KianNo ratings yet
- DYNS 30000 CalibratorDocument4 pagesDYNS 30000 Calibratorgolu201100% (2)
- Lab 7 PLC With Stepper MotorDocument3 pagesLab 7 PLC With Stepper Motorgedeus8072No ratings yet
- Multi-Functionality Condensed Into An All-In-One PackageDocument35 pagesMulti-Functionality Condensed Into An All-In-One PackagelauwgekweiNo ratings yet
- QD Motion Training Engl v1Document152 pagesQD Motion Training Engl v1phanvietnhat2003No ratings yet
- IAI PMEC AMEC Controller SpecsheetDocument10 pagesIAI PMEC AMEC Controller SpecsheetElectromateNo ratings yet
- Tutorial L298N Driver MotorDocument5 pagesTutorial L298N Driver MotorHairul Anam SNo ratings yet
- Caf Salidas ElectrónicasDocument6 pagesCaf Salidas ElectrónicasMiguel Angel Garrido CardenasNo ratings yet
- Especificaciones Tecnicas Deep Sea 501 - EspañolDocument2 pagesEspecificaciones Tecnicas Deep Sea 501 - EspañolMH..2023No ratings yet
- Manual and Remote Start Unit: Measurements DescriptionDocument2 pagesManual and Remote Start Unit: Measurements DescriptionDave WallaceNo ratings yet
- KK 2.1 Multi-Rotor Control Board: User GuideDocument15 pagesKK 2.1 Multi-Rotor Control Board: User GuideSagar DeshpandeNo ratings yet
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Rating: 2.5 out of 5 stars2.5/5 (3)
- Elevation-Encoder With Posital Inclinometer ACS-360-1-S101-VE2-AWDocument4 pagesElevation-Encoder With Posital Inclinometer ACS-360-1-S101-VE2-AWВиктор СабовNo ratings yet
- Trilithic Data Sheet Bts 781 GP: 1 1.1 FeaturesDocument17 pagesTrilithic Data Sheet Bts 781 GP: 1 1.1 FeaturesВиктор СабовNo ratings yet
- Manual SpeedcontrolDocument2 pagesManual SpeedcontrolВиктор СабовNo ratings yet
- Elevation-Encoder With Posital Inclinometer ACS-360-1-S101-VE2-AWDocument4 pagesElevation-Encoder With Posital Inclinometer ACS-360-1-S101-VE2-AWВиктор СабовNo ratings yet
- IRF740AS/L: Smps MosfetDocument10 pagesIRF740AS/L: Smps MosfetВиктор СабовNo ratings yet
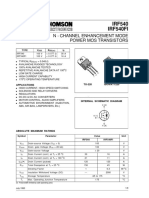
- IRF540 IRF540FI: N - Channel Enhancement Mode Power Mos TransistorsDocument9 pagesIRF540 IRF540FI: N - Channel Enhancement Mode Power Mos TransistorsВиктор СабовNo ratings yet
- Trejler Ebs eDocument43 pagesTrejler Ebs eВиктор СабовNo ratings yet
- Irfz 4XXXDocument6 pagesIrfz 4XXXВиктор СабовNo ratings yet
- Magnum Dxi13 Wiring ManualDocument149 pagesMagnum Dxi13 Wiring ManualВиктор Сабов100% (1)