Download as pdf or txt
You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5820)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1093)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (852)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (590)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (898)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (540)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (349)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (822)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (403)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Online Services - Access Nova Scotia - Government of Nova Scotia PDFDocument2 pagesOnline Services - Access Nova Scotia - Government of Nova Scotia PDFsheldon jessomeNo ratings yet
- FL Afd PLC 02Document2 pagesFL Afd PLC 02theaarelyifyNo ratings yet
- Speech Emotion Recognition Using Deep Learning Techniques: A ReviewDocument19 pagesSpeech Emotion Recognition Using Deep Learning Techniques: A ReviewAkhila RNo ratings yet
- Monster College Report1357540381Document10 pagesMonster College Report1357540381Anonymous nTxB1EPvNo ratings yet
- Surigao State College of Technology: LearningDocument11 pagesSurigao State College of Technology: LearningJamesula DetherNo ratings yet
- Awesome Boxes: Étienne Deparis 2019-07-27 v0.6Document8 pagesAwesome Boxes: Étienne Deparis 2019-07-27 v0.6nour1960No ratings yet
- 1014e-APC-NetShelterPDUAdvanced PocketGuide Rev11Document25 pages1014e-APC-NetShelterPDUAdvanced PocketGuide Rev11Nguyen NinhNo ratings yet
- Content MarketingDocument2 pagesContent Marketingdigitaldynamo056No ratings yet
- Digital Engagement Harden en XXXDocument5 pagesDigital Engagement Harden en XXXInternetian XNo ratings yet
- Entity Relationship ModelDocument41 pagesEntity Relationship ModelaziNo ratings yet
- EWARM DebuggingGuide - ENUDocument459 pagesEWARM DebuggingGuide - ENUspeed2051No ratings yet
- Chapter 4: Jacobians, Velocity, and Static Force: RoboticsDocument23 pagesChapter 4: Jacobians, Velocity, and Static Force: Roboticsbình nghuyễnNo ratings yet
- Ei 1596Document33 pagesEi 1596Muhammad Ibad Alam100% (2)
- WEG CFW300 Catalog 50066669 enDocument16 pagesWEG CFW300 Catalog 50066669 enRafael AndradeNo ratings yet
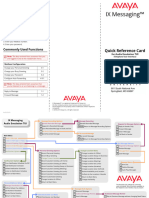
- Avaya IX Messaging Quick RefDocument2 pagesAvaya IX Messaging Quick RefPrakash kudalkarNo ratings yet
- DE1 I - O PinsDocument2 pagesDE1 I - O PinssadofhoangNo ratings yet
- Eegame LogcatDocument923 pagesEegame LogcatOthman playzNo ratings yet
- Special Client Onboarding TasksDocument11 pagesSpecial Client Onboarding TasksRichard Rhamil Carganillo Garcia Jr.No ratings yet
- LibeventDocument2 pagesLibeventJuan Carlos ArceNo ratings yet
- B_F5_AM_Lithium-ion-Hazard-Protection-with-F-500-EADocument8 pagesB_F5_AM_Lithium-ion-Hazard-Protection-with-F-500-EAjinaya5599No ratings yet
- Beginning C Compilers An Introductory Guide To Microsoft C C and Mingw Compilers 1St Edition Tuleuov Full ChapterDocument52 pagesBeginning C Compilers An Introductory Guide To Microsoft C C and Mingw Compilers 1St Edition Tuleuov Full Chaptermary.parks646100% (7)
- Control Volume Analysis Using EnergyDocument26 pagesControl Volume Analysis Using Energyrodrigo.nievasNo ratings yet
- Rts Plant Capacity Calculator RoiDocument1 pageRts Plant Capacity Calculator RoiUtkarsh VermaNo ratings yet
- 907 1TDSDocument2 pages907 1TDSJainam Shah100% (1)
- 模型剪枝在2d3d卷积网络中的研究与应用-悉尼大学在读博士生郭晋阳 智东西公开课Document70 pages模型剪枝在2d3d卷积网络中的研究与应用-悉尼大学在读博士生郭晋阳 智东西公开课jiahao liNo ratings yet
- Company Profile PT INTI 2020Document32 pagesCompany Profile PT INTI 2020Chef AmatirNo ratings yet
- ECT362-Jan 2024Document2 pagesECT362-Jan 2024rijovskNo ratings yet
- Unc Thesis and Dissertation GuideDocument8 pagesUnc Thesis and Dissertation Guiderosiequinonespaterson100% (2)
- Learning Continuity PlanDocument4 pagesLearning Continuity PlanIrene DulayNo ratings yet
- !!! IMMERGAS - Eolo-Star-23-KwDocument12 pages!!! IMMERGAS - Eolo-Star-23-Kwwiking777No ratings yet