Download as pdf or txt
You might also like
- TP1-W2-S3 YudhaDocument7 pagesTP1-W2-S3 YudhaKho Via0% (1)
- Optimization Problems Solving MethodsDocument51 pagesOptimization Problems Solving MethodsChaima BelhediNo ratings yet
- Iare Ot PptsDocument204 pagesIare Ot PptsRohitNo ratings yet
- ES - 06 - Optimization and Structural DesignDocument56 pagesES - 06 - Optimization and Structural DesignPro' GiosueleNo ratings yet
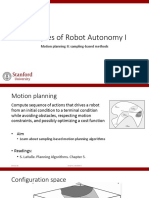
- Principles of Robot Autonomy I: Motion Planning II: Sampling-Based MethodsDocument29 pagesPrinciples of Robot Autonomy I: Motion Planning II: Sampling-Based MethodsratjerryNo ratings yet
- Genetics Algorithm3Document67 pagesGenetics Algorithm3Naggula Chinna100% (1)
- Introduction - Evolutionary AlgorithmsDocument37 pagesIntroduction - Evolutionary AlgorithmsMayank furniturewalaNo ratings yet
- Genetic AlgorithmDocument28 pagesGenetic Algorithmvinay rastogiNo ratings yet
- Lecture 5 - Algorithm Design TechniquesDocument21 pagesLecture 5 - Algorithm Design TechniquesWesty FxNo ratings yet
- Sanity 2Document11 pagesSanity 2HT Cooking ChannelNo ratings yet
- Principles of Robot Autonomy I: Motion Planning I: Graph Search MethodsDocument33 pagesPrinciples of Robot Autonomy I: Motion Planning I: Graph Search MethodsratjerryNo ratings yet
- Wk3-2 Defect Removal EffectivenessDocument21 pagesWk3-2 Defect Removal EffectivenessReshma K.PNo ratings yet
- Uninformed Search: (Based On Slides by Stuart Russell, Dan Weld, Oren Etzioni, Henry Kautz, and Other UW-AI Faculty)Document28 pagesUninformed Search: (Based On Slides by Stuart Russell, Dan Weld, Oren Etzioni, Henry Kautz, and Other UW-AI Faculty)Arun KashyapNo ratings yet
- Case Study 2022 TopicsDocument28 pagesCase Study 2022 TopicsPriyanka ChaudharyNo ratings yet
- Lec2 Part1Document35 pagesLec2 Part1Akram TaNo ratings yet
- Ant Colony Optimization: Quadratic Assignment ProblemDocument13 pagesAnt Colony Optimization: Quadratic Assignment ProblemEr. Amar KumarNo ratings yet
- Algo Lecture01Document66 pagesAlgo Lecture01Noor FatimaNo ratings yet
- Analytical DesignDocument38 pagesAnalytical Designsawyl AHAMEFULA MBANo ratings yet
- Genetic AlgorithmDocument31 pagesGenetic AlgorithmRovick TarifeNo ratings yet
- Discrete OptimizationDocument27 pagesDiscrete OptimizationMonika kakadeNo ratings yet
- Solving Problems by Searching & Constraint Satisfaction ProblemDocument53 pagesSolving Problems by Searching & Constraint Satisfaction ProblemMustefa MohammedNo ratings yet
- Chapter 3 - Solving Problems by SearchingDocument71 pagesChapter 3 - Solving Problems by SearchingSamiNo ratings yet
- Tariq - Vehicle Routing ProblemDocument19 pagesTariq - Vehicle Routing ProblemS M Tariq ShahNo ratings yet
- Modal AnaysisDocument250 pagesModal AnaysisMatteo RivaNo ratings yet
- Progress in Linear Programming Based Branch-and-Bound AlgorithmsDocument56 pagesProgress in Linear Programming Based Branch-and-Bound AlgorithmsHanifah HanumNo ratings yet
- Particle Swarm Optimi Z at IonDocument64 pagesParticle Swarm Optimi Z at Ionahmed salimNo ratings yet
- Artificial IntelligenceDocument67 pagesArtificial IntelligenceKevin Lakhani KLNo ratings yet
- Genetic Algorithms - Knapsack Problem - Knapsack ProblemDocument28 pagesGenetic Algorithms - Knapsack Problem - Knapsack ProblemLekshmiNo ratings yet
- Lect.2 - Fundamentals - of - Genetic - AlgorithmsDocument29 pagesLect.2 - Fundamentals - of - Genetic - AlgorithmsAmany El-zonkolyNo ratings yet
- UNIT - IV (Compatibility Mode)Document8 pagesUNIT - IV (Compatibility Mode)SreenivasaRao ChNo ratings yet
- Introduction To RecursionDocument7 pagesIntroduction To RecursionScott KramerNo ratings yet
- Week 5 - Heuristics Part IDocument16 pagesWeek 5 - Heuristics Part IEmile CornelissenNo ratings yet
- (Intro To) Evolutionary Computation Lecture 1: Overview of ECDocument28 pages(Intro To) Evolutionary Computation Lecture 1: Overview of ECMOOKAMBIGA ANo ratings yet
- Random SearchDocument14 pagesRandom Searchxafep75635No ratings yet
- OR Kuliah-10 TransportasiDocument19 pagesOR Kuliah-10 TransportasiBinsar SiahaanNo ratings yet
- Genetic Algorithms: Presented To: Dr. Sherin Youssof Presented By: Ahmad Abdullatif GoudahDocument24 pagesGenetic Algorithms: Presented To: Dr. Sherin Youssof Presented By: Ahmad Abdullatif Goudahalmuslim233869No ratings yet
- LPP FormulationDocument43 pagesLPP Formulationsangavi kaliyaperumalNo ratings yet
- Artificial IntelligenceDocument143 pagesArtificial IntelligenceBhuvaneshAngelsAngelsNo ratings yet
- Multiobjective OptimizationDocument36 pagesMultiobjective OptimizationMutiana SafitriNo ratings yet
- Cuckoo Search:: Recent Advances and ApplicationsDocument17 pagesCuckoo Search:: Recent Advances and ApplicationsVishnu N VNo ratings yet
- CSE 221 Lec01 Intro F23Document65 pagesCSE 221 Lec01 Intro F23Mohammed ZaitounNo ratings yet
- AI - Problem Solving - INCOMPLETEDocument67 pagesAI - Problem Solving - INCOMPLETEНашСоммерNo ratings yet
- Lecture 13Document23 pagesLecture 13hussain sardarNo ratings yet
- List Out Any Three Differences Between Natural Intelligence and Artificial Intelligence. 4.5MDocument10 pagesList Out Any Three Differences Between Natural Intelligence and Artificial Intelligence. 4.5Mlikhith chowdaryNo ratings yet
- To Build A System To Solve A ProblemDocument60 pagesTo Build A System To Solve A ProblemPiyush DatirNo ratings yet
- CS153: Compilers Lecture 19: Optimization: Stephen ChongDocument38 pagesCS153: Compilers Lecture 19: Optimization: Stephen Chongkavya sri gNo ratings yet
- Lecture 3-Covering ProblemsDocument34 pagesLecture 3-Covering ProblemsFandi AfrizalNo ratings yet
- Linear ProgrammingDocument30 pagesLinear Programmingyilma7gNo ratings yet
- Session 3 - Local SearchDocument34 pagesSession 3 - Local SearchAlfian RizkiNo ratings yet
- Particle Swarm Optimization For Transportation ProblemDocument37 pagesParticle Swarm Optimization For Transportation ProblemVõ Đình DoãnNo ratings yet
- ETHZ Lecture1Document49 pagesETHZ Lecture1Vishal SinhaNo ratings yet
- ML - Unit1 - GA SKGDocument78 pagesML - Unit1 - GA SKGsantoshNo ratings yet
- Spe Distinguished Lecturer SeriesDocument57 pagesSpe Distinguished Lecturer SeriesHamber khalafNo ratings yet
- Why ? PLM: (Product Lifecycle Management)Document22 pagesWhy ? PLM: (Product Lifecycle Management)BelagaviNo ratings yet
- Lecture06 Informed Search (Part 2)Document34 pagesLecture06 Informed Search (Part 2)Dream MakerNo ratings yet
- Lec 3Document31 pagesLec 3eng_kmmNo ratings yet
- L03 Problem Solving As Search IDocument66 pagesL03 Problem Solving As Search IThe Gamer Last nightNo ratings yet
- Hall Ticket Number:: Answer Question No.1 Compulsorily. Answer ONE Question From Each UnitDocument13 pagesHall Ticket Number:: Answer Question No.1 Compulsorily. Answer ONE Question From Each UnitLYF WITH AK KUMARNo ratings yet
- Daa CombinedDocument407 pagesDaa CombinedmghNo ratings yet
- Matlab ExampleDocument11 pagesMatlab ExampleNeeraj GuptaNo ratings yet
- AIM 30 Edwards Hart Alpha Beta HeuristicDocument5 pagesAIM 30 Edwards Hart Alpha Beta HeuristicAaron NelsonNo ratings yet
- Simplex MethodDocument29 pagesSimplex MethodSundaramali Govindaswamy GNo ratings yet
- CA427 RsmexampleDocument3 pagesCA427 RsmexamplePriyanka GargNo ratings yet
- 06 Jacobi Gauss SeidelDocument65 pages06 Jacobi Gauss SeidelKim Harly100% (1)
- Construcción Del Método SimplexDocument20 pagesConstrucción Del Método Simplexcuantic3No ratings yet
- Taller 2 de Programación Lineal y Entera - Solver - Dual y SensibilidadDocument3 pagesTaller 2 de Programación Lineal y Entera - Solver - Dual y SensibilidadJUAN FELIPE ALVAREZ LOPEZNo ratings yet
- Duality in LPP: Matrix Notation PrimalDocument52 pagesDuality in LPP: Matrix Notation Primalهيثم محمد عبده قائد المخلافيNo ratings yet
- Pencarian Rute Terpendek Perjalanan Promosi Marketing Menggunakan Algoritma Genetika Dan Algoritma GreedyDocument15 pagesPencarian Rute Terpendek Perjalanan Promosi Marketing Menggunakan Algoritma Genetika Dan Algoritma GreedyramzramadanNo ratings yet
- Problemset 2Document3 pagesProblemset 2Princeton FerroNo ratings yet
- Tarea 2 - Solución de Modelos de Programación Lineal de DecisiónDocument9 pagesTarea 2 - Solución de Modelos de Programación Lineal de DecisiónMaria OrozcoNo ratings yet
- Optimization For Machine Learning: Lecture 3: Basic Problems, Duality 6.881: MITDocument81 pagesOptimization For Machine Learning: Lecture 3: Basic Problems, Duality 6.881: MITMufakir Qamar AnsariNo ratings yet
- Gauss Seidel Method FinalDocument23 pagesGauss Seidel Method FinalKenjie BustilloNo ratings yet
- Or2 Tugasgt1 21s18052 PDF FreeDocument4 pagesOr2 Tugasgt1 21s18052 PDF FreeDeep MandlikNo ratings yet
- The University of Jordan Department of Mathematics: Branch and CutDocument17 pagesThe University of Jordan Department of Mathematics: Branch and CutAnonymous CZYe2HNo ratings yet
- Linear Systems - Iterative MethodsDocument55 pagesLinear Systems - Iterative MethodsGreen StoneNo ratings yet
- Mankuan-Fadila Feny-Alumni MNJ-2020Document12 pagesMankuan-Fadila Feny-Alumni MNJ-2020alNo ratings yet
- Newton Raphson Method:: Find Roots of The EquationDocument15 pagesNewton Raphson Method:: Find Roots of The Equationlaila khanNo ratings yet
- Gauss Seidel MethodDocument7 pagesGauss Seidel Method20-317 RithvikNo ratings yet
- Chapter 5 - Dual SimplexDocument24 pagesChapter 5 - Dual SimplexhaarsiniNo ratings yet
- Quasi Newton MethodsDocument17 pagesQuasi Newton Methodsm_k_aminNo ratings yet
- Bin Packing and Cutting Stock Problems: Mathematical Models and Exact AlgorithmsDocument35 pagesBin Packing and Cutting Stock Problems: Mathematical Models and Exact AlgorithmsNaoui KhalidaNo ratings yet
- 15.053 - Optimization Methods in Management Science (Spring 2007)Document9 pages15.053 - Optimization Methods in Management Science (Spring 2007)Ehsan SpencerNo ratings yet
- 22BDS0212 DAA Assignment 2Document8 pages22BDS0212 DAA Assignment 2arin.singla.09No ratings yet
- MEEN 644 HW02 Jack CavaluzziDocument10 pagesMEEN 644 HW02 Jack CavaluzziJack CavaluzziNo ratings yet
- Jacobi GaussDocument8 pagesJacobi GaussRyuji FabreNo ratings yet
- Algorithms: Ellman ORD EMODocument48 pagesAlgorithms: Ellman ORD EMOevilcomputerNo ratings yet
- HW7 QuestionsDocument3 pagesHW7 QuestionsOzan TokatlıNo ratings yet
- Calculo Del F80, P80, D50Document10 pagesCalculo Del F80, P80, D50ManuelGuevaraNo ratings yet