Download as pdf or txt
You might also like
- 1 UL SEVO Flex Manual PDFDocument64 pages1 UL SEVO Flex Manual PDFHarshith KunjathurNo ratings yet
- Week 3 DQ 1Document3 pagesWeek 3 DQ 1gabriel nzomoNo ratings yet
- Root LocusDocument26 pagesRoot LocusMuhammad Tariq SadiqNo ratings yet
- Root Locus Method 2Document33 pagesRoot Locus Method 2Umasankar ChilumuriNo ratings yet
- Root LocusDocument44 pagesRoot LocusDheer MehrotraNo ratings yet
- Classical Harmonic Crystal - 3DDocument3 pagesClassical Harmonic Crystal - 3DtxtanveerNo ratings yet
- Topic:-Root Locus: Muhammad Usman L2f08bsee0674 M Tariq Waseem L2f08bsee0715Document13 pagesTopic:-Root Locus: Muhammad Usman L2f08bsee0674 M Tariq Waseem L2f08bsee0715xenium9363No ratings yet
- 3.ROOT LOCUS Technique - Ruhizan Edit Oct2020Document42 pages3.ROOT LOCUS Technique - Ruhizan Edit Oct2020MOHD ENDRA SHAFIQNo ratings yet
- Control SystemsDocument58 pagesControl Systemsadityasingh273158No ratings yet
- B - Lecture10 The Root Locus Rules Automatic Control SystemDocument31 pagesB - Lecture10 The Root Locus Rules Automatic Control SystemAbaziz Mousa OutlawZzNo ratings yet
- Tutorial D2 2 Solutions2020Document5 pagesTutorial D2 2 Solutions2020ivancxyew13No ratings yet
- Chapter 6Document25 pagesChapter 6chalaNo ratings yet
- Unit 7: Part 1: Sketching The Root Locus: Engineering 5821: Control Systems IDocument24 pagesUnit 7: Part 1: Sketching The Root Locus: Engineering 5821: Control Systems INikhil PanikkarNo ratings yet
- Root Locus Method 2Document33 pagesRoot Locus Method 2Patel DipenNo ratings yet
- Control SystemsDocument94 pagesControl SystemsVaibhav DangeNo ratings yet
- Ecture Nverse Inematics: 1 DefinitionDocument13 pagesEcture Nverse Inematics: 1 Definitionulysse_d_ithaqu7083No ratings yet
- 1437235816control Systems (K-Wiki Root Locus) PDFDocument24 pages1437235816control Systems (K-Wiki Root Locus) PDFRitarshiChakrabortyNo ratings yet
- Chapter 7 - Root Locus TechniquesDocument39 pagesChapter 7 - Root Locus TechniquesANDREW LEONG CHUN TATT STUDENTNo ratings yet
- Control Manual Lab 10Document14 pagesControl Manual Lab 10Hussain HadiNo ratings yet
- Unit 7: Part 2: Refining The Root Locus: Engineering 5821: Control Systems IDocument15 pagesUnit 7: Part 2: Refining The Root Locus: Engineering 5821: Control Systems INikhil PanikkarNo ratings yet
- LecttureIIRoot Locus Method 2Document57 pagesLecttureIIRoot Locus Method 2JmbernabeNo ratings yet
- Atomic Term SymbolsDocument4 pagesAtomic Term SymbolsM IkhsanNo ratings yet
- DFTDocument36 pagesDFTAnanth RaghavNo ratings yet
- Root LocusDocument27 pagesRoot LocusAzmi Bin A MataliNo ratings yet
- Root LocusDocument18 pagesRoot LocusgigoNo ratings yet
- Chapter 10 Root LocusDocument63 pagesChapter 10 Root LocusMariam A Sameh ANo ratings yet
- Prestige Institute of Engineering & Science Indore (M.P.)Document3 pagesPrestige Institute of Engineering & Science Indore (M.P.)SagarManjrekarNo ratings yet
- Root Locus: Figure 1: Pole/Zeros Diagrams in The Car Cruise Control Example For K 50 and K 100Document29 pagesRoot Locus: Figure 1: Pole/Zeros Diagrams in The Car Cruise Control Example For K 50 and K 100anas habashNo ratings yet
- Root Locus Diagram: Upon Completion of This Chapter You Will Be Able ToDocument24 pagesRoot Locus Diagram: Upon Completion of This Chapter You Will Be Able ToGnanendraReddyNo ratings yet
- Laboratory Exercise No. 6 Poles and Zeros of A Transfer FunctionDocument10 pagesLaboratory Exercise No. 6 Poles and Zeros of A Transfer FunctionYasmin KayeNo ratings yet
- Root LocusDocument95 pagesRoot LocusPiyooshTripathi100% (1)
- Space Simulation Lab ManualDocument55 pagesSpace Simulation Lab ManualBhanuNo ratings yet
- EE331 - L09 - Signals & SystemsDocument51 pagesEE331 - L09 - Signals & Systemsahmetyasinbulut99No ratings yet
- B - Lecture11 Extension of The Root Locus Automatic Control SystemDocument15 pagesB - Lecture11 Extension of The Root Locus Automatic Control SystemAbaziz Mousa OutlawZz100% (1)
- Electronic Spectra of Transition MetalDocument39 pagesElectronic Spectra of Transition MetaljohnwilliamsNo ratings yet
- Coordination Chemistry III 2ndDocument34 pagesCoordination Chemistry III 2ndharis100% (2)
- Chapter 8: Root Locus TechniquesDocument10 pagesChapter 8: Root Locus TechniquesPurab RanjanNo ratings yet
- Ch. 6: DynamicsDocument32 pagesCh. 6: DynamicsVienNgocQuangNo ratings yet
- Clase Lugar Geometrico de Las Raices IDocument32 pagesClase Lugar Geometrico de Las Raices IJesus Tapia GallardoNo ratings yet
- F44128640 Homework 2 LCS DING JoelDocument16 pagesF44128640 Homework 2 LCS DING JoelNotnowNo ratings yet
- Control Exp 8 Student ManualDocument7 pagesControl Exp 8 Student ManualSyed Nahid Ahmed TopuNo ratings yet
- EXAMPLE PROBLEMS AND SOLUTIONS Ogata - Root - Locus PDFDocument32 pagesEXAMPLE PROBLEMS AND SOLUTIONS Ogata - Root - Locus PDFabdulqader100% (3)
- Note 8 Root-Locus TechniquesDocument10 pagesNote 8 Root-Locus TechniquesΙωάννης Γεωργίου ΜάντηςNo ratings yet
- Derivation of Root Locus Rules: ExamplesDocument20 pagesDerivation of Root Locus Rules: ExamplesBuvanesh Buvi VnrNo ratings yet
- pw3 SolDocument12 pagespw3 Soltwee tomasNo ratings yet
- Root Locus: Illustrative ExampleDocument17 pagesRoot Locus: Illustrative Examplevaibhav471995No ratings yet
- W3 2016 4 - EPC 431 - Kinematics of Robot Manipulator Part4 RevisedDocument29 pagesW3 2016 4 - EPC 431 - Kinematics of Robot Manipulator Part4 RevisedNuraisha SyafiqaNo ratings yet
- (EXE) Random Walknetwork SDocument7 pages(EXE) Random Walknetwork SChristian F. VegaNo ratings yet
- The IR-resummed Effective Field Theory of Large Scale StructuresDocument37 pagesThe IR-resummed Effective Field Theory of Large Scale StructurescrocoaliNo ratings yet
- Control System Synthesis by Root Locus PDFDocument4 pagesControl System Synthesis by Root Locus PDFSohail AhmedNo ratings yet
- Electronic SpectraDocument22 pagesElectronic SpectraVishnu ChariNo ratings yet
- Electronic SoectraDocument25 pagesElectronic SoectraAbhinav KumarNo ratings yet
- Root Locus MethodDocument23 pagesRoot Locus MethodChanoxismNo ratings yet
- Section 5Document16 pagesSection 5api-26021617No ratings yet
- Butler Volmer TafelDocument71 pagesButler Volmer TafelYocobSamandrewsNo ratings yet
- Chapter Two: Mathematical Modeling of A SystemDocument83 pagesChapter Two: Mathematical Modeling of A SystemBonsa MuletaNo ratings yet
- Chapter 6Document39 pagesChapter 6Mohamed KhalidNo ratings yet
- Tables of Coefficients for the Analysis of Triple Angular Correlations of Gamma-Rays from Aligned NucleiFrom EverandTables of Coefficients for the Analysis of Triple Angular Correlations of Gamma-Rays from Aligned NucleiNo ratings yet
- Difference Equations in Normed Spaces: Stability and OscillationsFrom EverandDifference Equations in Normed Spaces: Stability and OscillationsNo ratings yet
- Unit 8: Part 3: PID Tuning: Engineering 5821: Control Systems IDocument10 pagesUnit 8: Part 3: PID Tuning: Engineering 5821: Control Systems INikhil PanikkarNo ratings yet
- Unit 8: Part 2: PD, PID, and Feedback Compensation: Engineering 5821: Control Systems IDocument32 pagesUnit 8: Part 2: PD, PID, and Feedback Compensation: Engineering 5821: Control Systems INikhil PanikkarNo ratings yet
- Unit 7: Part 2: Refining The Root Locus: Engineering 5821: Control Systems IDocument15 pagesUnit 7: Part 2: Refining The Root Locus: Engineering 5821: Control Systems INikhil PanikkarNo ratings yet
- Unit 3: Time Response, Part 2: Second-Order Responses: Engineering 5821: Control Systems IDocument22 pagesUnit 3: Time Response, Part 2: Second-Order Responses: Engineering 5821: Control Systems INikhil PanikkarNo ratings yet
- Unit 7: Part 1: Sketching The Root Locus: Engineering 5821: Control Systems IDocument24 pagesUnit 7: Part 1: Sketching The Root Locus: Engineering 5821: Control Systems INikhil PanikkarNo ratings yet
- Unit 5: Stability: Engineering 5821: Control Systems IDocument18 pagesUnit 5: Stability: Engineering 5821: Control Systems INikhil PanikkarNo ratings yet
- Unit 3: Time Response, Part 3: Systems With Additional Poles or ZeroesDocument10 pagesUnit 3: Time Response, Part 3: Systems With Additional Poles or ZeroesNikhil PanikkarNo ratings yet
- Unit 3: Time Response Part 1: Poles and Zeros and First-Order SystemsDocument11 pagesUnit 3: Time Response Part 1: Poles and Zeros and First-Order SystemsNikhil PanikkarNo ratings yet
- Implementation of DSP Algorithms On Fixed Point DSP ProcessorsDocument13 pagesImplementation of DSP Algorithms On Fixed Point DSP ProcessorsNikhil PanikkarNo ratings yet
- DynamicsDocument26 pagesDynamicsNikhil Panikkar100% (1)
- Comparative Efficacy and Safety of New Surgical Treatments For Benign Prostatic Hyperplasia Systematic Review and NetwoDocument11 pagesComparative Efficacy and Safety of New Surgical Treatments For Benign Prostatic Hyperplasia Systematic Review and NetwoMahesa Kurnianti PutriNo ratings yet
- Updated Accomplishment ReportDocument6 pagesUpdated Accomplishment ReportJessel YaraNo ratings yet
- Automated Water Pump With Dry Run Intimation Using GSMDocument4 pagesAutomated Water Pump With Dry Run Intimation Using GSMankush belkar100% (1)
- Dokumen - Tips - Dynamic Systems Mechanical SystemsDocument64 pagesDokumen - Tips - Dynamic Systems Mechanical SystemsAnas AlsayarNo ratings yet
- Advantages Disadvantages EssayDocument2 pagesAdvantages Disadvantages EssaylilalilakNo ratings yet
- 41 2os02Document12 pages41 2os02Miguel Angel RodriguezNo ratings yet
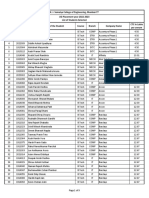
- UG Students SelectedDocument10 pagesUG Students SelectedDiNo ratings yet
- Gec108 LQ2Document10 pagesGec108 LQ2Suzy LeeNo ratings yet
- Brosnan y Sun PDFDocument14 pagesBrosnan y Sun PDFSandra KristellNo ratings yet
- Hydroline Breather FSB TB 130417Document3 pagesHydroline Breather FSB TB 130417Arun GeorgeNo ratings yet
- 2.3.02 AOAC of Fi Cial Method 958.01 Phos Pho Rus (To Tal) in Fer Til IzersDocument1 page2.3.02 AOAC of Fi Cial Method 958.01 Phos Pho Rus (To Tal) in Fer Til Izersestefania100% (1)
- Scientech 2801: PAM, PPM, PWM and Line Coding TechniquesDocument2 pagesScientech 2801: PAM, PPM, PWM and Line Coding Techniquesعلاء حسينNo ratings yet
- Multilevel Converters: Control and Modulation Techniques For Their Operation and Industrial ApplicationsDocument16 pagesMultilevel Converters: Control and Modulation Techniques For Their Operation and Industrial ApplicationsGanesh PradhanNo ratings yet
- Early Childhood DevelopmentDocument100 pagesEarly Childhood DevelopmentJoviner Yabres LactamNo ratings yet
- ADS1115 ComparatorDifferentialDocument5 pagesADS1115 ComparatorDifferentialLeandro De VegaNo ratings yet
- M&M 3e - Power Profile - Mental Powers (SAMPLE)Document3 pagesM&M 3e - Power Profile - Mental Powers (SAMPLE)DDTWilsonNo ratings yet
- RPL Evidence Summary For EDM 205: Critical Issues in EducationDocument2 pagesRPL Evidence Summary For EDM 205: Critical Issues in EducationAriane del RosarioNo ratings yet
- Saint Francis of Assisi College - Taguig CampusDocument9 pagesSaint Francis of Assisi College - Taguig CampusLien HuaNo ratings yet
- NH 6035448106 PreviewDocument51 pagesNH 6035448106 PreviewYesenia Gpe Vega0% (1)
- Math10 Q1 Mod2-3 Week3Document54 pagesMath10 Q1 Mod2-3 Week3Grace Joy CansecoNo ratings yet
- How To Use IIC Module On M68HC08, HCS08, and HCS12 Mcus: Application NoteDocument18 pagesHow To Use IIC Module On M68HC08, HCS08, and HCS12 Mcus: Application NoteJuan CarlosNo ratings yet
- ChemEngineering 05 00015 v3Document16 pagesChemEngineering 05 00015 v3Siti Khalifatul MillahNo ratings yet
- Rocker Arm & Valve Train Geometry - Circle Track Magazine All PagesDocument5 pagesRocker Arm & Valve Train Geometry - Circle Track Magazine All PagesDinesh Kumar SNo ratings yet
- A Review: Speed Control of Brushless DC Motor: December 2017Document7 pagesA Review: Speed Control of Brushless DC Motor: December 2017Gopu MayyalaNo ratings yet
- Eurotruss XDDocument2 pagesEurotruss XDjoshNo ratings yet
- Lesson 10 Graphic OrganizersDocument22 pagesLesson 10 Graphic Organizersisabelcadagtan10No ratings yet
- Diagrama General Refrigerador Frijidare Ffss2312lsaDocument2 pagesDiagrama General Refrigerador Frijidare Ffss2312lsaRegulo GomezNo ratings yet
- Nebosh Igc-1 Important Questions and Answers: Element 2 Health and Safety Management Systems 1 - Policy Q1Document6 pagesNebosh Igc-1 Important Questions and Answers: Element 2 Health and Safety Management Systems 1 - Policy Q1Wafula RobertNo ratings yet