Download as pdf or txt
You might also like
- Map and Lambda Function Problem Solution - Python - HackerrankDocument1 pageMap and Lambda Function Problem Solution - Python - HackerrankSagar ManeNo ratings yet
- CSE110 Assignment 07 QuestionDocument2 pagesCSE110 Assignment 07 Questionsihab sahariarNo ratings yet
- Daa 5th UnitDocument65 pagesDaa 5th Unityadhucr5577No ratings yet
- Graphs: Dr.A.Ashok Kumar Department of Computer Science Alagappa Government Arts College KaraikudiDocument24 pagesGraphs: Dr.A.Ashok Kumar Department of Computer Science Alagappa Government Arts College KaraikudiAmbrose Ashok KumarNo ratings yet
- Elementary Graph Algorithms: 1 GraphsDocument8 pagesElementary Graph Algorithms: 1 Graphsroshanmishra7604No ratings yet
- Raph Raversals: A B C DDocument22 pagesRaph Raversals: A B C DHarshitShuklaNo ratings yet
- Algorithms Mini Field Guide 2.0: Fast Fourier TransformDocument5 pagesAlgorithms Mini Field Guide 2.0: Fast Fourier TransformBrandonMaushundNo ratings yet
- Dfsand BfsDocument12 pagesDfsand BfsComputerScience DepartmentNo ratings yet
- Assignment 3: Joseph Sharp Luevano (Sharplue) Tingyu Liang (Liangt19)Document4 pagesAssignment 3: Joseph Sharp Luevano (Sharplue) Tingyu Liang (Liangt19)王乔峪No ratings yet
- Euler TourDocument2 pagesEuler TourRohith AthreyaNo ratings yet
- Graph Searching - JavaDocument32 pagesGraph Searching - JavaonlineearningforNo ratings yet
- Graph AlgorithmsDocument70 pagesGraph AlgorithmsDương Vũ MinhNo ratings yet
- 3 NotesDocument4 pages3 NotesCyrus LiNo ratings yet
- Graph Traversal Algorithm: RecapitulationDocument14 pagesGraph Traversal Algorithm: RecapitulationamukhopadhyayNo ratings yet
- Quiz2 3510 Cheat-SheetDocument4 pagesQuiz2 3510 Cheat-SheetKatherine Pham100% (1)
- MODULE 5 GraphsDocument29 pagesMODULE 5 GraphsRal RalteNo ratings yet
- 06 GraphsDocument4 pages06 Graphsapi-3705606No ratings yet
- Graphs and AlgorithmsDocument7 pagesGraphs and AlgorithmsYing ChowNo ratings yet
- Unit 3Document18 pagesUnit 3Jyo ReddyNo ratings yet
- Dfs BfsDocument14 pagesDfs BfsmjayadurgaNo ratings yet
- Graph SearchingDocument4 pagesGraph SearchingqwertyuiopoNo ratings yet
- Graph BFS - DFSDocument64 pagesGraph BFS - DFS19050 Anish RoyNo ratings yet
- Geeks GraphDocument107 pagesGeeks GraphBHARAT SINGH RAJPUROHITNo ratings yet
- Define Basic Graph Terminologies: Lecture NotesDocument18 pagesDefine Basic Graph Terminologies: Lecture NotesShailesh WagholeNo ratings yet
- Graph Searching - JavaDocument32 pagesGraph Searching - Javamumaid258No ratings yet
- Lecture AlgoDocument64 pagesLecture AlgoArqam SyedNo ratings yet
- Graphs PDFDocument66 pagesGraphs PDFsudhanNo ratings yet
- CSE247 Exam 3 Study GuideDocument5 pagesCSE247 Exam 3 Study Guidemichael BlauNo ratings yet
- Mathematical Foundations of Computer Science - UNIT-5Document17 pagesMathematical Foundations of Computer Science - UNIT-5Shantha Kumar50% (2)
- Module 5Document223 pagesModule 5Kumar Kaushal 040No ratings yet
- GeorgiaTech CS-6515: Graduate Algorithms: Graphs-Book Notes Flashcards by Calvin Hoang - BrainscapeDocument10 pagesGeorgiaTech CS-6515: Graduate Algorithms: Graphs-Book Notes Flashcards by Calvin Hoang - BrainscapeJan_SuNo ratings yet
- Graphs: CS 308 - Data StructuresDocument38 pagesGraphs: CS 308 - Data StructuresAbhilash RudraNo ratings yet
- Exp 10 DFSDocument4 pagesExp 10 DFSenggeng7No ratings yet
- 01FE20BEC295Document29 pages01FE20BEC295Anirudh GalagaliNo ratings yet
- Chap 22Document29 pagesChap 22frankembangNo ratings yet
- Graphs Breadth First Search & Depth First Search: by Shailendra UpadhyeDocument21 pagesGraphs Breadth First Search & Depth First Search: by Shailendra Upadhyeجعفر عباسNo ratings yet
- Graphs Breadth First Search & Depth First Search: by Shailendra UpadhyeDocument21 pagesGraphs Breadth First Search & Depth First Search: by Shailendra Upadhyeجعفر عباسNo ratings yet
- Graphs: For Expressing Non-Hierarchically Related ItemsDocument17 pagesGraphs: For Expressing Non-Hierarchically Related ItemsoznurkirmemisNo ratings yet
- Part2 3GraphTraversalDocument99 pagesPart2 3GraphTraversalTrần Khánh LươngNo ratings yet
- 17-BFS, DFS-22-02-2024Document30 pages17-BFS, DFS-22-02-2024seralathan sNo ratings yet
- WINSEM2023-24 BSTS302P SS CH2023240500208 Reference Material I 19-02-2024 BFS DFSDocument30 pagesWINSEM2023-24 BSTS302P SS CH2023240500208 Reference Material I 19-02-2024 BFS DFSSrinivasan 21BME1128No ratings yet
- 04 Graphs BfsDocument2 pages04 Graphs BfsnavadweepNo ratings yet
- Union DisjointDocument7 pagesUnion DisjointAnuradha RaoNo ratings yet
- Bfs Lemmas & DfsDocument9 pagesBfs Lemmas & Dfsjeanneta oliviaNo ratings yet
- Elementary Graph Algorithms: Manoj Agnihotri M.Tech I.T Dept of CSE ACET AmritsarDocument58 pagesElementary Graph Algorithms: Manoj Agnihotri M.Tech I.T Dept of CSE ACET Amritsarkshitij1993No ratings yet
- Graph Algorithms - BFS: Outlines: Graphs Part-2Document15 pagesGraph Algorithms - BFS: Outlines: Graphs Part-2Mohammed HajjajNo ratings yet
- Archie P. Amparo MCS 501: August 11, 2012Document9 pagesArchie P. Amparo MCS 501: August 11, 2012apamparoNo ratings yet
- אלגוריתמים- הרצאה 5 - DFS, Topological Sort and Strongly Connected ComponentsDocument10 pagesאלגוריתמים- הרצאה 5 - DFS, Topological Sort and Strongly Connected ComponentsRonNo ratings yet
- GraphsDocument26 pagesGraphsMercyless K1NG-No ratings yet
- Graph Part 1Document18 pagesGraph Part 1kefiyalew kuntaNo ratings yet
- Review:: Graphs and Some Graph AlgorithmsDocument11 pagesReview:: Graphs and Some Graph AlgorithmsshraddhasinghaiNo ratings yet
- Supp Graph 1Document40 pagesSupp Graph 1Rupinder KaurNo ratings yet
- WINSEM2023-24 BSTS302P SS CH2023240500132 Reference Material I 28-02-2024 TOPOLOGICAL SORTDocument24 pagesWINSEM2023-24 BSTS302P SS CH2023240500132 Reference Material I 28-02-2024 TOPOLOGICAL SORTShiyamaladevi R SNo ratings yet
- Breadth-First Search: Breadth-First Search (BFS) Is A Traversing Algorithm Where You Starts From A GivenDocument13 pagesBreadth-First Search: Breadth-First Search (BFS) Is A Traversing Algorithm Where You Starts From A GivenvivekNo ratings yet
- Graphs Bfs DfsDocument21 pagesGraphs Bfs DfsShah GeeNo ratings yet
- Graph Algorithms: CSE5311 - Lectures by Prof. Chris DingDocument12 pagesGraph Algorithms: CSE5311 - Lectures by Prof. Chris DingjawafuhajNo ratings yet
- Analysis of Algorithms I: Depth-First Search and Topological SortDocument26 pagesAnalysis of Algorithms I: Depth-First Search and Topological SortGulshan MittalNo ratings yet
- Breadth First Search (BFS) : Input: Graph G (V, E), Either Directed or Undirected, OutputDocument53 pagesBreadth First Search (BFS) : Input: Graph G (V, E), Either Directed or Undirected, OutputDavid RobertsonNo ratings yet
- Graph AlgorithmsDocument51 pagesGraph AlgorithmsYatru Harsha HiskiNo ratings yet
- Lecture 9: Breadth-First Search: New Unit: Graphs!Document5 pagesLecture 9: Breadth-First Search: New Unit: Graphs!Van Vy HongNo ratings yet
- Hackerrank: ProblemsDocument8 pagesHackerrank: ProblemsSagar ManeNo ratings yet
- MAD Assignment AnswersDocument23 pagesMAD Assignment AnswersSagar ManeNo ratings yet
- TCS NQT SessionDocument15 pagesTCS NQT SessionSagar ManeNo ratings yet
- TCS NQTDocument31 pagesTCS NQTSagar ManeNo ratings yet
- Intermediate Code Forms (Variant I and Variant II)Document11 pagesIntermediate Code Forms (Variant I and Variant II)Sagar Mane100% (3)
- Sqlite Program ExplanationDocument19 pagesSqlite Program ExplanationSagar ManeNo ratings yet
- N P-Hard and N P-Complete ProblemsDocument12 pagesN P-Hard and N P-Complete ProblemsSagar ManeNo ratings yet
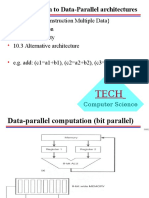
- 10.introduction To Data-Parallel ArchitecturesDocument12 pages10.introduction To Data-Parallel ArchitecturesSagar ManeNo ratings yet
- V.V.P. Institute of Engg. & Technology, Solapur: Department of Computer Science and EngineeringDocument2 pagesV.V.P. Institute of Engg. & Technology, Solapur: Department of Computer Science and EngineeringSagar ManeNo ratings yet
- V.V.P .Institute of Engineering & Technology, Solapur Department of Computer Science & EngineeringDocument3 pagesV.V.P .Institute of Engineering & Technology, Solapur Department of Computer Science & EngineeringSagar ManeNo ratings yet
- Lab Manual C++Document24 pagesLab Manual C++Sagar ManeNo ratings yet
- Extrat Time TableSunday TTDocument2 pagesExtrat Time TableSunday TTSagar ManeNo ratings yet
- Hardware Support For Compiler Speculation: Winter 2006 CSE 548 - Speculation & Exceptions 1Document3 pagesHardware Support For Compiler Speculation: Winter 2006 CSE 548 - Speculation & Exceptions 1Sagar ManeNo ratings yet
- Cpe 242 Computer Architecture and Engineering Instruction Level ParallelismDocument46 pagesCpe 242 Computer Architecture and Engineering Instruction Level ParallelismSagar ManeNo ratings yet
- Assignments For Device Drivers Programming in LinuxDocument11 pagesAssignments For Device Drivers Programming in LinuxSahil KhanNo ratings yet
- Developers Guide Driving TWS For zOS Eqqn1mstDocument398 pagesDevelopers Guide Driving TWS For zOS Eqqn1mstBurhan MalikNo ratings yet
- Dbif RSQL SQL ErrorDocument49 pagesDbif RSQL SQL ErrorpraveenavadamalaiNo ratings yet
- Debug DirectXDocument10 pagesDebug DirectXinnaNo ratings yet
- Acado OptimizationDocument33 pagesAcado OptimizationAndrea SpencerNo ratings yet
- Rajan SahDocument42 pagesRajan Sahprinceadhikari51No ratings yet
- CHAPTER ONE - Introduction To System ProgrammingDocument7 pagesCHAPTER ONE - Introduction To System ProgrammingamanuelNo ratings yet
- Assignment 1Document3 pagesAssignment 1namanjaat4186No ratings yet
- Single Level Directory OrganizationDocument8 pagesSingle Level Directory OrganizationarunasekaranNo ratings yet
- Philip Guo CVDocument11 pagesPhilip Guo CVGina OsorioNo ratings yet
- AS400 CommandsDocument86 pagesAS400 CommandsrjnollNo ratings yet
- GUI Programming With Python - Message Widget in TkinterDocument3 pagesGUI Programming With Python - Message Widget in TkinterNguyễn HọcNo ratings yet
- SCB 0104Document15 pagesSCB 0104Mauricio DominguesNo ratings yet
- Editors (Vim) : Strong Opinions Stack Overflow Survey Visual Studio Code VimDocument9 pagesEditors (Vim) : Strong Opinions Stack Overflow Survey Visual Studio Code Vimurdamihai82No ratings yet
- Villarreal Et al-2018-ZDMDocument15 pagesVillarreal Et al-2018-ZDMCelia FasceNo ratings yet
- ScilabTec Xcos PDFDocument31 pagesScilabTec Xcos PDFsandeep devabhaktuniNo ratings yet
- Z Request Program CompareDocument18 pagesZ Request Program ComparecronosspNo ratings yet
- Lecture 3.1.4 Introduction of Design Methodologies and Data DesignDocument9 pagesLecture 3.1.4 Introduction of Design Methodologies and Data DesignSahil GoyalNo ratings yet
- Task 1: Recording: 1. Give Transaction SHDB (Transaction Recorder), This Is Used To Record Our TransactionDocument18 pagesTask 1: Recording: 1. Give Transaction SHDB (Transaction Recorder), This Is Used To Record Our TransactionRajiv KumarNo ratings yet
- Bienve Nidos: Tecnología Avanzada en Bases de DatosDocument42 pagesBienve Nidos: Tecnología Avanzada en Bases de DatoscobiamNo ratings yet
- MPMC Manual - Ar17Document87 pagesMPMC Manual - Ar17Sowmya ChowdaryNo ratings yet
- String AlgorithmDocument17 pagesString AlgorithmHafidz Jazuli LuthfiNo ratings yet
- Programación EdgecamDocument9 pagesProgramación EdgecamRodriguez Taveras BernardoNo ratings yet
- Google Sheet FormulaDocument3 pagesGoogle Sheet FormulaRUPESH SHARMANo ratings yet
- Association Rule Mining ExampleDocument12 pagesAssociation Rule Mining ExamplesanjeewascribdNo ratings yet
- Execution (Computing)Document4 pagesExecution (Computing)emma698No ratings yet
- Writing Externals For MaxDocument4 pagesWriting Externals For MaxgfhjdfNo ratings yet
- Tutorial 7 TTTK1114 UKMDocument11 pagesTutorial 7 TTTK1114 UKMNURUL SYAFIQAH BINTI NORIHSANNo ratings yet
- Alg DS1 Example Test 2Document3 pagesAlg DS1 Example Test 2deaarasheed77No ratings yet