Download as pdf or txt
You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5823)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1093)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (852)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (590)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (898)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (541)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (349)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (823)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (403)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Chapter 8 ACCA F2Document9 pagesChapter 8 ACCA F2sikshaNo ratings yet
- How To Write Your Conference Paper For IC-AIRES2020: First A. Author1,2,, Second B. Author2, and Third C. Author3Document3 pagesHow To Write Your Conference Paper For IC-AIRES2020: First A. Author1,2,, Second B. Author2, and Third C. Author3kadaNo ratings yet
- Parallel Genetic Algorithm Taxonomy: Mnowostawski@Infoscience - Otago.Ac - NZ R.Poli@Cs - Bham.Ac - UkDocument5 pagesParallel Genetic Algorithm Taxonomy: Mnowostawski@Infoscience - Otago.Ac - NZ R.Poli@Cs - Bham.Ac - UkkadaNo ratings yet
- Camera Ready Submission Guidelines: Revise Your PaperDocument1 pageCamera Ready Submission Guidelines: Revise Your PaperkadaNo ratings yet
- A Succinct Survey On NSGA2 - Organigramme NSGA2Document4 pagesA Succinct Survey On NSGA2 - Organigramme NSGA2kadaNo ratings yet
- NSGA2 - Slide 07 PDFDocument15 pagesNSGA2 - Slide 07 PDFkadaNo ratings yet
- Towards Hybrid EaDocument17 pagesTowards Hybrid EakadaNo ratings yet
- Genetic Diversity of Dog Breeds Within-Breed Diversity Comparing Genealogical and Molecular DataDocument10 pagesGenetic Diversity of Dog Breeds Within-Breed Diversity Comparing Genealogical and Molecular DatakadaNo ratings yet
- A Fast Elitist Non-Dominated Sorting Genetic Algorithm For Multi-Objective Optimization: NSGA-IIDocument11 pagesA Fast Elitist Non-Dominated Sorting Genetic Algorithm For Multi-Objective Optimization: NSGA-IIkadaNo ratings yet
- Business Process Optimization - Where Do I Start?: What Ed SaysDocument2 pagesBusiness Process Optimization - Where Do I Start?: What Ed SayskadaNo ratings yet
- Using A Dominance-Based Rough Set Approach For Analysing Business IndicatorsDocument10 pagesUsing A Dominance-Based Rough Set Approach For Analysing Business IndicatorskadaNo ratings yet
- Dominance-Based Rough Set Approach in Selection of Portfolio of Sustainable Development ProjectsDocument7 pagesDominance-Based Rough Set Approach in Selection of Portfolio of Sustainable Development ProjectskadaNo ratings yet
- APA Citation GuideDocument5 pagesAPA Citation Guidekada100% (1)
- Womb World Mandala Reflections of The BuDocument11 pagesWomb World Mandala Reflections of The BuLenka MladenovićNo ratings yet
- TAS Product Catalog 2020 01Document210 pagesTAS Product Catalog 2020 01ct0720054858No ratings yet
- STAAD - Pro Plates and Solid Elements (FAQ) - RAM - STAAD Wiki - RAM - STAAD - Bentley CommunitiesDocument15 pagesSTAAD - Pro Plates and Solid Elements (FAQ) - RAM - STAAD Wiki - RAM - STAAD - Bentley CommunitiesKamal RaoNo ratings yet
- Chapter 1 V6.1Document100 pagesChapter 1 V6.1Asharab JunaidNo ratings yet
- PPAP Workbook SupplierDocument25 pagesPPAP Workbook SupplierJuan VillaNo ratings yet
- FPM Formula Sheet 2Document13 pagesFPM Formula Sheet 2Yolo Gamer DudeNo ratings yet
- Dynalene PG FG (Heat Transfer Fluid) : 1. Product and Company IdentificationDocument5 pagesDynalene PG FG (Heat Transfer Fluid) : 1. Product and Company IdentificationIvan DumontNo ratings yet
- History Medicine Knowledge OrganiserDocument4 pagesHistory Medicine Knowledge OrganiserabidaNo ratings yet
- Chemistry Practical Procedure Systematic Analysis of Salt STD: Xi & XiiDocument9 pagesChemistry Practical Procedure Systematic Analysis of Salt STD: Xi & XiivarshiniNo ratings yet
- The Bromination of Acetone Lab ReportDocument4 pagesThe Bromination of Acetone Lab ReportSammy Njenga KhanNo ratings yet
- Cot - Math 3Document5 pagesCot - Math 3Lorimae Vallejos100% (7)
- Momiji North Bend MenuDocument8 pagesMomiji North Bend MenuAndy MoeNo ratings yet
- 5 MuscleDocument3 pages5 MuscleNicolePorsueloNo ratings yet
- DP - X510 BrochureDocument2 pagesDP - X510 BrochureRommel SegismundoNo ratings yet
- Pathophysiology Cardiac ArrestDocument1 pagePathophysiology Cardiac ArrestPATHOSHOPPE100% (2)
- Question Bank Final Year BDSDocument19 pagesQuestion Bank Final Year BDSPoonam K JayaprakashNo ratings yet
- Stresses in Finite Anisotropic Plate Weakened by Rectangular HoleDocument8 pagesStresses in Finite Anisotropic Plate Weakened by Rectangular Holemihir.chauhanNo ratings yet
- Gasoline Specifications: S. No Characteristic Bsii Bsiii Bsiv 1 2 3 (A) 3 (B) 4 5 (A) (B) (C)Document2 pagesGasoline Specifications: S. No Characteristic Bsii Bsiii Bsiv 1 2 3 (A) 3 (B) 4 5 (A) (B) (C)Velshankar MJNo ratings yet
- Magic TutorialDocument3 pagesMagic TutorialGaurav SainiNo ratings yet
- PaintsDocument20 pagesPaintsPashmi Shah100% (1)
- Italian P-38Document10 pagesItalian P-38pacueroNo ratings yet
- The Blessed TrinityDocument2 pagesThe Blessed TrinityPatNo ratings yet
- RevA.11Oct17.RCDG Bridge COSTFinalDocument3 pagesRevA.11Oct17.RCDG Bridge COSTFinalPaul MercadoNo ratings yet
- Princeton 112 Plus Service ManualDocument8 pagesPrinceton 112 Plus Service ManualDavid OliveiraNo ratings yet
- Operating Manual Parts List: 1500VMC (FANUC 0iMD)Document261 pagesOperating Manual Parts List: 1500VMC (FANUC 0iMD)apodsh100% (1)
- Table MGMTDocument1 pageTable MGMTعلی احمد نعیمNo ratings yet
- National Green Tech PolicyDocument3 pagesNational Green Tech Policyalexcus1539100% (1)
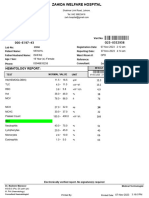
- Hematology Report:: MRN: Visit NoDocument1 pageHematology Report:: MRN: Visit Nojuniadsheikh6No ratings yet
- Piping Info - Pipe Support Design GuidelinesDocument4 pagesPiping Info - Pipe Support Design GuidelinesSUSHANTBIJAM100% (1)