Download as pdf or txt
You might also like
- 6th Central Pay Commission Salary CalculatorDocument15 pages6th Central Pay Commission Salary Calculatorrakhonde100% (436)
- Performance Analysis of 33 11kv Substation and Its FeedersDocument6 pagesPerformance Analysis of 33 11kv Substation and Its FeedersShivang LowanshiNo ratings yet
- How To Test Distance Relay 7SA522 - EditedDocument55 pagesHow To Test Distance Relay 7SA522 - Editedvernight100% (2)
- DC Surge Protection Solutions: Data SheetDocument2 pagesDC Surge Protection Solutions: Data SheetNick ButcherNo ratings yet
- Distance Relay ProtectionDocument38 pagesDistance Relay ProtectionLove Buddha's WordsNo ratings yet
- Protection Two Types Unit Non Unit Line Non Unit Type (Distance) Compare Unit Type Primary & Back - Up Protections Local Remote Zone of ProtectionDocument38 pagesProtection Two Types Unit Non Unit Line Non Unit Type (Distance) Compare Unit Type Primary & Back - Up Protections Local Remote Zone of ProtectionBhuvanes Waran100% (5)
- Ground Distance RelaysDocument78 pagesGround Distance Relaysardianto hamonanganNo ratings yet
- Subject Name: Communication Networks and Transmission Lines Subject Code: EC-5004 Semester: 5Document16 pagesSubject Name: Communication Networks and Transmission Lines Subject Code: EC-5004 Semester: 5Harsh PatelNo ratings yet
- Ar PPDocument63 pagesAr PPThant ZinNo ratings yet
- Line ProtectionDocument44 pagesLine Protectionchaichaloem waihorNo ratings yet
- Distance Protection For Transmission Lines: Part 1: Power Transmission and DistributionDocument12 pagesDistance Protection For Transmission Lines: Part 1: Power Transmission and Distributionkjan8899No ratings yet
- Inspection and Testing of OC/EF Protection Relay: Relay Site Test ReportDocument3 pagesInspection and Testing of OC/EF Protection Relay: Relay Site Test ReportMASUD RANANo ratings yet
- Chapter 13 Oscillators and MixersDocument23 pagesChapter 13 Oscillators and MixersBảo BìnhNo ratings yet
- 8C - Small Signal Amplifier Design - Design For Constant Mismatch, Effective Power GainDocument12 pages8C - Small Signal Amplifier Design - Design For Constant Mismatch, Effective Power GaindunyaninbaskentiNo ratings yet
- 01.transformer ProtnDocument63 pages01.transformer ProtnSiva Nandham100% (1)
- Distance Protection TheoryDocument31 pagesDistance Protection TheoryDaniel Andres Bastardo NuñezNo ratings yet
- SEE716 - Seminar Week 5 - Current TransformerDocument49 pagesSEE716 - Seminar Week 5 - Current TransformerAnuNo ratings yet
- How To Test Distance Relay 7SA522 PDFDocument55 pagesHow To Test Distance Relay 7SA522 PDFBalaji100% (1)
- Two Port NetworksDocument64 pagesTwo Port Networkssahulipunku2001No ratings yet
- Quadrilateral Distance Element Example: ECE 526 Protection of Power Systems II Session 8 Page 1/13 Spring 2017Document13 pagesQuadrilateral Distance Element Example: ECE 526 Protection of Power Systems II Session 8 Page 1/13 Spring 2017Christos ApostolopoulosNo ratings yet
- CADAM2009 Numerical Simulation of Distance Protection On Three Terminal High Voltage Transmission LinesDocument14 pagesCADAM2009 Numerical Simulation of Distance Protection On Three Terminal High Voltage Transmission Linesrian0201No ratings yet
- 01 Dist BasicsDocument22 pages01 Dist BasicsAshok KumarNo ratings yet
- Advance Protective RelayDocument30 pagesAdvance Protective Relaysimul HasanNo ratings yet
- ETAP 18 Distance Protection - Relay-NotesDocument117 pagesETAP 18 Distance Protection - Relay-NotesAqib KhanNo ratings yet
- Three Zone Distance Protection of Transmission Line: March 2019Document8 pagesThree Zone Distance Protection of Transmission Line: March 2019shakeralhyaneNo ratings yet
- 24 EEE470Ch10-5 Lecture 24 (Zones and Directional Overcurrent) Updated 2Document45 pages24 EEE470Ch10-5 Lecture 24 (Zones and Directional Overcurrent) Updated 2Mohamed ZekryNo ratings yet
- Fundamentals of Distance Protection: Conference PaperDocument36 pagesFundamentals of Distance Protection: Conference PaperShahnawaz AhmadNo ratings yet
- Distance Protection Relay of LineDocument11 pagesDistance Protection Relay of LineYahya DarNo ratings yet
- Two-Port Network Parameters: Celso José Faria de Araújo, DRDocument27 pagesTwo-Port Network Parameters: Celso José Faria de Araújo, DRTiago Bezerra SchmittNo ratings yet
- EE251 Notes1 - Short Circuit CalculationsDocument61 pagesEE251 Notes1 - Short Circuit CalculationsPrime MoverNo ratings yet
- Distance Priciples - Basic PrinciplesDocument64 pagesDistance Priciples - Basic PrinciplesRamesh Bakthavachalam100% (1)
- Bridges Impedance Measurement: Experiment # 4Document20 pagesBridges Impedance Measurement: Experiment # 4Harsha MadduriNo ratings yet
- Comparing Primary and Secondary Ohms and Converting To Per Unit On Secondary When CTR and VTR Don't Cancel-L4Document3 pagesComparing Primary and Secondary Ohms and Converting To Per Unit On Secondary When CTR and VTR Don't Cancel-L4Ahmed RabaaNo ratings yet
- Current TransformerDocument76 pagesCurrent TransformerJignesh100% (2)
- Distance Principles - Basic PrincipleDocument76 pagesDistance Principles - Basic Principlemanu2020100% (1)
- Distance Relay NotesDocument117 pagesDistance Relay Notesbrijal100% (1)
- Distance Principles - Basic PrincipleDocument76 pagesDistance Principles - Basic PrinciplePasopati MadeNo ratings yet
- Presentation On Transmission Line ProtectionDocument34 pagesPresentation On Transmission Line ProtectionSushil Sharma100% (2)
- Impedance Relays: Chapter 10 - Part 6Document48 pagesImpedance Relays: Chapter 10 - Part 6Mohamed ZekryNo ratings yet
- Opendss Tech Note Distance Relays: K Z Z Z I I I I Z Vi Ki Z VV I IDocument6 pagesOpendss Tech Note Distance Relays: K Z Z Z I I I I Z Vi Ki Z VV I ILeonardo LeonNo ratings yet
- 4 Distance PDFDocument60 pages4 Distance PDFJaved Ahmed LaghariNo ratings yet
- Transformadores Zig ZagDocument3 pagesTransformadores Zig ZagJose AlejandroNo ratings yet
- Bilateral Teleoperation System Stability With Non-Passive and Strictly-Passive Operator or EnvironmentDocument28 pagesBilateral Teleoperation System Stability With Non-Passive and Strictly-Passive Operator or EnvironmentLegis FloyenNo ratings yet
- Introduction To Frequency Domain Analysis (3 Classes) : Instructor: Richard MellitzDocument80 pagesIntroduction To Frequency Domain Analysis (3 Classes) : Instructor: Richard MellitzAnh Viet NguyenNo ratings yet
- SCR 1Document21 pagesSCR 1Prasun MoyraNo ratings yet
- Power Supply To Plot P18 at Zayed Military City D108337 SWH38A1Document3 pagesPower Supply To Plot P18 at Zayed Military City D108337 SWH38A1Jayaprakash M PNo ratings yet
- Two Port NetworkDocument51 pagesTwo Port NetworkPranzal SharmaNo ratings yet
- Basics of RF Electronics: Alessandro GalloDocument29 pagesBasics of RF Electronics: Alessandro GalloMONICA LOHNo ratings yet
- Active Filters 3Document17 pagesActive Filters 3maithuong85No ratings yet
- Electrocardiograph: Unit 2: Bio Medical Recorders and Bio AmplifierDocument13 pagesElectrocardiograph: Unit 2: Bio Medical Recorders and Bio AmplifierAvni Majawadia JainNo ratings yet
- Distance RelayDocument21 pagesDistance RelayManoj GuptaNo ratings yet
- First Chapter Engineering TrainingDocument42 pagesFirst Chapter Engineering TrainingHaziq TarmiziNo ratings yet
- Sinusoids and Phasors: Delta-To-Wye and Wye-To-Delta Conversions Phase Sifters. AC Bridges. Problem SolutionsDocument18 pagesSinusoids and Phasors: Delta-To-Wye and Wye-To-Delta Conversions Phase Sifters. AC Bridges. Problem SolutionsWESTLY JUCONo ratings yet
- Chapter 5 - Two Port NetworksDocument53 pagesChapter 5 - Two Port NetworksHong QuanNo ratings yet
- 1 - Reminder Basics On Analog RF ElectronicsDocument11 pages1 - Reminder Basics On Analog RF Electronicsyared leulNo ratings yet
- 6026 NewGroundDirectional WebDocument20 pages6026 NewGroundDirectional WebVignesh ChalapathyNo ratings yet
- Lec8 Numerical Distance ProtectionDocument24 pagesLec8 Numerical Distance ProtectionEVTNo ratings yet
- Ic Applications Lab R15Document40 pagesIc Applications Lab R15RRANINo ratings yet
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2No ratings yet
- CONTRACT - JAP006-D73 132/11kV PALM, JUMEIRAH S/S (4 Nos) 11Kv Switchgear VT CalculationDocument6 pagesCONTRACT - JAP006-D73 132/11kV PALM, JUMEIRAH S/S (4 Nos) 11Kv Switchgear VT CalculationmadhavanNo ratings yet
- CT Calc-Gs-Lvac Swgr.Document54 pagesCT Calc-Gs-Lvac Swgr.madhavanNo ratings yet
- CT CALC-093-GS-11kV-BDocument36 pagesCT CALC-093-GS-11kV-Bmadhavan100% (1)
- CT CALC-093-GS-11kV SWGRDocument323 pagesCT CALC-093-GS-11kV SWGRmadhavanNo ratings yet
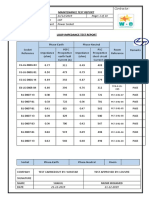
- 21/12/2019 Page: 1 of 6: Earth Loop Impedance TestDocument6 pages21/12/2019 Page: 1 of 6: Earth Loop Impedance TestmadhavanNo ratings yet
- Loop Impedance - GFDocument5 pagesLoop Impedance - GFmadhavanNo ratings yet
- Thermography Report 134Document3 pagesThermography Report 134madhavanNo ratings yet
- Loop Impedance - LGFDocument10 pagesLoop Impedance - LGFmadhavanNo ratings yet
- Loop Impedance - B1Document5 pagesLoop Impedance - B1madhavanNo ratings yet
- Thermography Report 134Document3 pagesThermography Report 134madhavanNo ratings yet
- Loop Impedance - B1Document5 pagesLoop Impedance - B1madhavanNo ratings yet
- Loop Impedance - B2Document8 pagesLoop Impedance - B2madhavanNo ratings yet
- Thermography Report-02 - 147Document5 pagesThermography Report-02 - 147madhavanNo ratings yet
- Thermography Report 125Document3 pagesThermography Report 125madhavanNo ratings yet
- Curs 5 EEDI Rev 2020 EN - PpsDocument38 pagesCurs 5 EEDI Rev 2020 EN - PpsPanda On FireNo ratings yet
- BECKER UHF Leaky Feeder Brochure 2022Document3 pagesBECKER UHF Leaky Feeder Brochure 2022mikeNo ratings yet
- Electromagnetic Test Facility For Nose-Mounted RadomesDocument22 pagesElectromagnetic Test Facility For Nose-Mounted RadomesInterogator5No ratings yet
- Soal Latihan Uts Sma Kelas X Bahasa InggDocument2 pagesSoal Latihan Uts Sma Kelas X Bahasa InggAndry SetiawanNo ratings yet
- Roland Edirol UA-1X Owner ManualDocument124 pagesRoland Edirol UA-1X Owner ManualBigg DadyNo ratings yet
- CLF1G0035 100 - 1G0035S 100Document20 pagesCLF1G0035 100 - 1G0035S 100Leonardus Suryo SuhartoNo ratings yet
- JT-OLI-3: Output Load IsolatorDocument2 pagesJT-OLI-3: Output Load IsolatorLuis Otavio TrindadeNo ratings yet
- CS7202022 - 01 Apxvbb26x3 - 43-C-I20Document3 pagesCS7202022 - 01 Apxvbb26x3 - 43-C-I20Christian Javier Lopez DuranNo ratings yet
- Name: Section: Date: Activity No. 1Document2 pagesName: Section: Date: Activity No. 1margilyn ramos100% (2)
- Chap 10 - Sound Waves 25-11-2023Document12 pagesChap 10 - Sound Waves 25-11-2023Taamilchelvi saravananNo ratings yet
- Synchronization For QDPSK - Costas Loop and Gardner Algorithm Using FpgasDocument5 pagesSynchronization For QDPSK - Costas Loop and Gardner Algorithm Using FpgasSatya NagendraNo ratings yet
- ELEC1010 Homework 1 SolDocument5 pagesELEC1010 Homework 1 SolKoo DavidNo ratings yet
- LTE Transmission Mode 9 (TM9) Feature Overview: Confidential and Proprietary - Qualcomm Technologies, IncDocument24 pagesLTE Transmission Mode 9 (TM9) Feature Overview: Confidential and Proprietary - Qualcomm Technologies, Incburdun777No ratings yet
- ADC Lab Manual Auto Even2019 20 YBJDocument91 pagesADC Lab Manual Auto Even2019 20 YBJMalay GuptaNo ratings yet
- Synscanwifi - 102 2Document2 pagesSynscanwifi - 102 2sloko2No ratings yet
- TC-20KL03A TC-29KL03A: PanasonicDocument48 pagesTC-20KL03A TC-29KL03A: PanasonicRaden MasNo ratings yet
- 3e0377 Install Note Io Expansion Interface - 2Document11 pages3e0377 Install Note Io Expansion Interface - 2bsdygswdywNo ratings yet
- CS7276788 - 01 T0030MXV011Document2 pagesCS7276788 - 01 T0030MXV011budi wirahmiNo ratings yet
- Ubc3300xlt ManualDocument100 pagesUbc3300xlt ManualJose VerduNo ratings yet
- 555 Timer 40khz IRDocument2 pages555 Timer 40khz IRapi-3712130No ratings yet
- Matched Filtering and Digital Pulse Amplitude Modulation (PAM)Document32 pagesMatched Filtering and Digital Pulse Amplitude Modulation (PAM)lz1233No ratings yet
- Research About The Dangers of 5G in AustraliaDocument4 pagesResearch About The Dangers of 5G in AustraliaKwaiNo ratings yet
- Goc For Gmdss Competency 1Document7 pagesGoc For Gmdss Competency 1Lemon SweaterNo ratings yet
- Antenne A704521R0v06 DatasheetDocument1 pageAntenne A704521R0v06 DatasheetStefan SchettNo ratings yet
- 200-PABX Alphatron AlphaConnect 48-128-Classic TechSpec Manual FIO4 1-1-2016Document5 pages200-PABX Alphatron AlphaConnect 48-128-Classic TechSpec Manual FIO4 1-1-2016quan vuNo ratings yet
- IC7000 All ModsDocument24 pagesIC7000 All ModsJuan Carlos CancioNo ratings yet
- Solution To Microwave Engineering Pozar Chapter 14 Example 8 With MATLABDocument2 pagesSolution To Microwave Engineering Pozar Chapter 14 Example 8 With MATLABJohn Bofarull GuixNo ratings yet
- Subject: Communications: Theoretical Knowledge Examination For Obtaining PPL (H)Document25 pagesSubject: Communications: Theoretical Knowledge Examination For Obtaining PPL (H)Sunny SinghNo ratings yet
- P B N M: Media and Information LiteracyDocument11 pagesP B N M: Media and Information LiteracyJohn Stephen BagaygayNo ratings yet