Download as pdf or txt
You might also like
- Biomedical Science Personal StatementDocument1 pageBiomedical Science Personal StatementBojan Ivanović0% (2)
- Chap 6 StrategicDocument29 pagesChap 6 Strategicmaria bitarNo ratings yet
- Chapter Seven: Decision Making, Learning, Creativity, and EntrepreneurshipDocument40 pagesChapter Seven: Decision Making, Learning, Creativity, and EntrepreneurshipAnnisa Amalia SalsabiilaNo ratings yet
- Vaneless DiffuserDocument8 pagesVaneless Diffuseramir_karimiNo ratings yet
- AFC GermanyDocument20 pagesAFC GermanySalvador MangioneNo ratings yet
- Border Paper (17march10) BDocument28 pagesBorder Paper (17march10) BdfafddsfasdNo ratings yet
- Numerical Flow Simulation Using Star CCM+Document9 pagesNumerical Flow Simulation Using Star CCM+Alexander DeckerNo ratings yet
- WRE 404 Lab - Lec1 To Lec6Document22 pagesWRE 404 Lab - Lec1 To Lec6ShahAfzalSakiNo ratings yet
- Open ChannelDocument12 pagesOpen ChannelMohammad MohammadiNo ratings yet
- SST Flap Opt JADocument28 pagesSST Flap Opt JAMühtür HerhaldeNo ratings yet
- An Optimization Model For Sustainable Water Distribution Network DesignDocument14 pagesAn Optimization Model For Sustainable Water Distribution Network DesignSolomon ElumaNo ratings yet
- Hec Ras ModuleDocument46 pagesHec Ras ModulerodrigoquintanillaNo ratings yet
- Hydraulic Engineering Using Hec-Ras: 1 - Theory and BackgroundDocument46 pagesHydraulic Engineering Using Hec-Ras: 1 - Theory and BackgroundTETRACONE GEOTECHNIQUENo ratings yet
- 5 - Superelevation & Transition CurvesDocument20 pages5 - Superelevation & Transition Curvesmochan31100% (3)
- Experimental Analysis and Computational-Fluid-Dynamics Modeling of Pilot-Scale Three-Phase SeparatorsDocument15 pagesExperimental Analysis and Computational-Fluid-Dynamics Modeling of Pilot-Scale Three-Phase Separators기계공학과/김수빈No ratings yet
- Faculty of Civil and Environmental Engineering Department of Civil Engineering (Jka) SEM 1 SESSION 2020/2021Document16 pagesFaculty of Civil and Environmental Engineering Department of Civil Engineering (Jka) SEM 1 SESSION 2020/2021SeanTanNo ratings yet
- Effects of Curvature and Area Distribution On S-Shaped Subsonic Diffuser PerformanceDocument7 pagesEffects of Curvature and Area Distribution On S-Shaped Subsonic Diffuser PerformanceKnow HowNo ratings yet
- Simulation of Ow Meter Calibration Factors For Various Installation EffectsDocument11 pagesSimulation of Ow Meter Calibration Factors For Various Installation Effectstagne simo rodrigueNo ratings yet
- Asgmnt HECRASDocument7 pagesAsgmnt HECRASShahruzi MahadzirNo ratings yet
- Nazif2009 PDFDocument22 pagesNazif2009 PDFMihretu AbrhamNo ratings yet
- Optimization of A Profile Extrusion Die For Flow Balance: Fibers and Polymers April 2014Document10 pagesOptimization of A Profile Extrusion Die For Flow Balance: Fibers and Polymers April 2014Allen PrasadNo ratings yet
- Water 08 00495Document21 pagesWater 08 00495Victor PeterNo ratings yet
- Sewer System Design Using Simulated Annealing in ExcelDocument15 pagesSewer System Design Using Simulated Annealing in ExcelCristian MonterreyNo ratings yet
- Identification of Correlation Between Demand Performances To Damage of Lining Concrete For Tunnel ManagementDocument6 pagesIdentification of Correlation Between Demand Performances To Damage of Lining Concrete For Tunnel ManagementHadji Javier TejucoNo ratings yet
- Energies: Towards Accurate Boundary Conditions For CFD Models of Synthetic Jets in Quiescent FlowDocument22 pagesEnergies: Towards Accurate Boundary Conditions For CFD Models of Synthetic Jets in Quiescent FlowMesum IrfaniNo ratings yet
- Optimal Design of Pipe Network by An Improved Genetic AlgorithmDocument12 pagesOptimal Design of Pipe Network by An Improved Genetic AlgorithmJR GANo ratings yet
- Feature Based VisualisationDocument18 pagesFeature Based VisualisationRider RanjithNo ratings yet
- 10 18038-Aubtda 340798-351378Document11 pages10 18038-Aubtda 340798-351378ayesha siddiqaNo ratings yet
- Numerical Analysis of Seepage in Embankment Dams IISR-JMCEDocument11 pagesNumerical Analysis of Seepage in Embankment Dams IISR-JMCEEndless LoveNo ratings yet
- Navier - Stokes Optimization Using Genetic Algorithm and A FlexibleDocument7 pagesNavier - Stokes Optimization Using Genetic Algorithm and A FlexibleVasu BansalNo ratings yet
- Computational Model and Solver SetupDocument11 pagesComputational Model and Solver SetupaunbhuttaNo ratings yet
- 456Document21 pages456David LapacaNo ratings yet
- On The Identification of Flutter DerivatDocument27 pagesOn The Identification of Flutter DerivathoangvinhdzungNo ratings yet
- Optimization of AirfoilsDocument9 pagesOptimization of AirfoilsMD SHAHRIARMAHMUDNo ratings yet
- Multivariable Predictive Control of A Pilot Flotation ColumnDocument6 pagesMultivariable Predictive Control of A Pilot Flotation ColumnEduardo PutzNo ratings yet
- Matveev - Tool For Predicting PerformanceDocument8 pagesMatveev - Tool For Predicting Performancea44yann100% (1)
- Formulas For Computing Geometry and CriticalDocument6 pagesFormulas For Computing Geometry and Criticalpramods_8No ratings yet
- 118403-7272 Ijmme-IjensDocument7 pages118403-7272 Ijmme-IjensYulius Widiardi PwNo ratings yet
- Efficient Hydrodynamic Analysis of Very Large Oating StructuresDocument12 pagesEfficient Hydrodynamic Analysis of Very Large Oating StructuresMohamed RashidNo ratings yet
- Seepage AnalysisDocument42 pagesSeepage Analysismazin jaderNo ratings yet
- Manning Roughness Coefficient Study On Materials Non Cohesive With Using Entropy To Open Channel FlowDocument10 pagesManning Roughness Coefficient Study On Materials Non Cohesive With Using Entropy To Open Channel FlowAnonymous dsgfjiMeYMNo ratings yet
- Norwegian HydrofoilsDocument44 pagesNorwegian HydrofoilsncharalaNo ratings yet
- Water Impact: Experimental Tests and Numerical Simulations Using Meshless MethodsDocument12 pagesWater Impact: Experimental Tests and Numerical Simulations Using Meshless Methodsbb06412000No ratings yet
- Parametric Design of A Francis Turbine Runner by Means of A Three-Dimensional Inverse Design MethodDocument11 pagesParametric Design of A Francis Turbine Runner by Means of A Three-Dimensional Inverse Design MethodsandeshbhavsarNo ratings yet
- Numerical and Experimental Investigation On The Realization of Target Flow Distribution Among Parallel Mini-ChannelsDocument4 pagesNumerical and Experimental Investigation On The Realization of Target Flow Distribution Among Parallel Mini-ChannelsSyed Yasir Raza ZaidiNo ratings yet
- Large Eddy Simulation of Distillation Sieve Tray Hydrodynamics Using Volume-of-Fluid (VOF) Multiphase ModelDocument6 pagesLarge Eddy Simulation of Distillation Sieve Tray Hydrodynamics Using Volume-of-Fluid (VOF) Multiphase ModelTIK_953No ratings yet
- Comparative Design of Plug and Recirculation RO Systems Thermoeconomic Case Study - ScienceDirectDocument1 pageComparative Design of Plug and Recirculation RO Systems Thermoeconomic Case Study - ScienceDirectchengawy7No ratings yet
- Continuum Sensitivity Analysis For Aeroelastic Shape OptimizationDocument17 pagesContinuum Sensitivity Analysis For Aeroelastic Shape Optimizationmike.zhao0824No ratings yet
- Multi-Objective Optimization of Border Irrigation Technical ParameterDocument7 pagesMulti-Objective Optimization of Border Irrigation Technical ParameterfarhanNo ratings yet
- For Water Distribution Network: Golden Research Thoughts Impact Factor: 2.2052 (UIF) Volume-3 - Issue-11 - May-2014Document8 pagesFor Water Distribution Network: Golden Research Thoughts Impact Factor: 2.2052 (UIF) Volume-3 - Issue-11 - May-2014ProfAshraf BalabelNo ratings yet
- Aerodynamic Analysis Involving Moving Parts With XFlowDocument12 pagesAerodynamic Analysis Involving Moving Parts With XFlowDmitry GrenishenNo ratings yet
- 11 Chapter2Document17 pages11 Chapter2junNo ratings yet
- Experimentacion RapidasDocument10 pagesExperimentacion RapidasOscar Choque JaqquehuaNo ratings yet
- Optimizing Runner Blade Profile of Francis Turbine To Minimize Sediment ErosionDocument12 pagesOptimizing Runner Blade Profile of Francis Turbine To Minimize Sediment ErosionJohn Larry CorpuzNo ratings yet
- Kerbala Journal Three JunctionsDocument13 pagesKerbala Journal Three JunctionsLaith ShammariNo ratings yet
- Comparison of Near-Wall Treatment Methods For High Reynolds Number For Backward StepDocument8 pagesComparison of Near-Wall Treatment Methods For High Reynolds Number For Backward StepValentina MarucaNo ratings yet
- Full Report HecRasDocument25 pagesFull Report HecRasHafizul ZaidanNo ratings yet
- Reliability Modeling Using Finite Element Response Surface TechniquesDocument11 pagesReliability Modeling Using Finite Element Response Surface Techniquesklomps_jrNo ratings yet
- Atmosphere: Assessing The Horizontal Homogeneity of The Atmospheric Boundary Layer (HHABL) Profile Using DiDocument26 pagesAtmosphere: Assessing The Horizontal Homogeneity of The Atmospheric Boundary Layer (HHABL) Profile Using DiIsmael Rojo AlvarezNo ratings yet
- Level Set Method: Advancing Computer Vision, Exploring the Level Set MethodFrom EverandLevel Set Method: Advancing Computer Vision, Exploring the Level Set MethodNo ratings yet
- Neues verkehrswissenschaftliches Journal - Ausgabe 16: Capacity Research in Urban Rail-Bound Transportation with Special Consideration of Mixed TrafficFrom EverandNeues verkehrswissenschaftliches Journal - Ausgabe 16: Capacity Research in Urban Rail-Bound Transportation with Special Consideration of Mixed TrafficNo ratings yet
- Mahmood Younis M.Ali 2. Muhammed Abs M.Ali 3. Zaytun Ihsan 4. Veyan Ismail 5. HannaDocument6 pagesMahmood Younis M.Ali 2. Muhammed Abs M.Ali 3. Zaytun Ihsan 4. Veyan Ismail 5. HannaM ZanganaNo ratings yet
- Chart TitleDocument1 pageChart TitleM ZanganaNo ratings yet
- Reinforced Concrete Design: (8th Edition)Document1 pageReinforced Concrete Design: (8th Edition)M ZanganaNo ratings yet
- Generic Array Logic (GAL) (GAL)Document7 pagesGeneric Array Logic (GAL) (GAL)M ZanganaNo ratings yet
- Triaxial Shear Behavior of A Cement-Treated Sand and Gravel MixtureDocument15 pagesTriaxial Shear Behavior of A Cement-Treated Sand and Gravel MixtureM ZanganaNo ratings yet
- ReportDocument1 pageReportM ZanganaNo ratings yet
- "Border Irrigation'': University of Kirkuk - College of Engineering Civil Department - Third Stage ADocument9 pages"Border Irrigation'': University of Kirkuk - College of Engineering Civil Department - Third Stage AM ZanganaNo ratings yet
- (A) محمود يونس محمدعليDocument15 pages(A) محمود يونس محمدعليM ZanganaNo ratings yet
- Engineering Numerical AnalysisDocument70 pagesEngineering Numerical AnalysisM Zangana100% (1)
- SamplingDocument5 pagesSamplinggdayanand4uNo ratings yet
- ISO Methodology PDFDocument132 pagesISO Methodology PDFRavindra ErabattiNo ratings yet
- SMT Maherbanu College of Science and Commerce, Akola: Quick Facts of CourseDocument2 pagesSMT Maherbanu College of Science and Commerce, Akola: Quick Facts of CourseShankar ThakareNo ratings yet
- Conclusion ReportDocument2 pagesConclusion ReportKimNanamiNo ratings yet
- AS ENTREP Week-2Document4 pagesAS ENTREP Week-2markjohnmagcalengNo ratings yet
- Fortran RT-IDA3D: Towards A Real-Time Computerized Ionospheric Tomography System Suitable As Input To Ionospheric Data Assimilation ModelsDocument8 pagesFortran RT-IDA3D: Towards A Real-Time Computerized Ionospheric Tomography System Suitable As Input To Ionospheric Data Assimilation ModelsVucjipastir77No ratings yet
- Construct Validity of Animal-Assisted Therapy and Activities - HowDocument16 pagesConstruct Validity of Animal-Assisted Therapy and Activities - HowMarcell MolnárNo ratings yet
- Experimental Studies (Field Trials, Community TrialsDocument17 pagesExperimental Studies (Field Trials, Community TrialsLuthfi PebridilaNo ratings yet
- LESSON 2 - Linear and Non-Linear TextDocument30 pagesLESSON 2 - Linear and Non-Linear TextJhandy Bryan ElpaNo ratings yet
- H Clinical Assessment ToolsDocument71 pagesH Clinical Assessment ToolsPaijo SusenoNo ratings yet
- Pre-Historic Cave Images of Lorestan (Iran)Document3 pagesPre-Historic Cave Images of Lorestan (Iran)TI Journals PublishingNo ratings yet
- Food Science and Nutrition UG Syllabus 2018-19Document59 pagesFood Science and Nutrition UG Syllabus 2018-19Kr SelvakumarNo ratings yet
- Machine LearningDocument24 pagesMachine LearningHari KrishnanNo ratings yet
- Mendoza Tudor Tuiza - Optodev Inc VERSION 4 PDFDocument119 pagesMendoza Tudor Tuiza - Optodev Inc VERSION 4 PDFBriee TuizaNo ratings yet
- Dissertation Results London MetDocument8 pagesDissertation Results London MetHelpWithYourPaperSingapore100% (1)
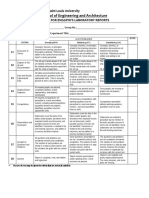
- School of Engineering and Architecture: Saint Louis University Rubric For Enggphys Laboratory ReportsDocument1 pageSchool of Engineering and Architecture: Saint Louis University Rubric For Enggphys Laboratory ReportsKit LbjNo ratings yet
- Mateo, Jelly Anne-Policy Implementation & EvaluationDocument12 pagesMateo, Jelly Anne-Policy Implementation & EvaluationJelly Anne MateoNo ratings yet
- IG 1 Element 3 Set 1Document87 pagesIG 1 Element 3 Set 1PradeepNo ratings yet
- Xxvii. Syllabus For Jnu Entrance Examination 2020-21Document68 pagesXxvii. Syllabus For Jnu Entrance Examination 2020-21MD Abdul AowalNo ratings yet
- Monorail Project ProposalDocument3 pagesMonorail Project ProposalAsmawi Mohamad100% (1)
- A Critical Analysis of Tourist Satisfaction and Destination LoyaltyDocument7 pagesA Critical Analysis of Tourist Satisfaction and Destination LoyaltyAina ZainuddinNo ratings yet
- Strategic Management - An Introduction To The Seminars and The Case Study MethodDocument26 pagesStrategic Management - An Introduction To The Seminars and The Case Study MethodAyush PokharelNo ratings yet
- Time Series Analysis - Smoothing Methods PDFDocument29 pagesTime Series Analysis - Smoothing Methods PDFMayur HampiholiNo ratings yet
- PSA Printed Report 1Document33 pagesPSA Printed Report 1Mariyam SarfrazNo ratings yet
- Session 1 Selling SuccessfullyDocument35 pagesSession 1 Selling SuccessfullyAnandkumar Pokala67% (3)
- Effects of Personal Values and Locus of Control On The Evaluation of Political ChoicesDocument26 pagesEffects of Personal Values and Locus of Control On The Evaluation of Political Choicesomarganai9763No ratings yet
- Assessing Technical Services in Abdullahi Muhammed Public Library Zaria, NigeriaDocument4 pagesAssessing Technical Services in Abdullahi Muhammed Public Library Zaria, Nigeriasiwes unitNo ratings yet