Download as pdf or txt
You might also like
- Vibration TransducerDocument7 pagesVibration TransducerPrakash Kumar100% (1)
- Ultrasound Analysis for Condition Monitoring: Applications of Ultrasound Detection for Various Industrial EquipmentFrom EverandUltrasound Analysis for Condition Monitoring: Applications of Ultrasound Detection for Various Industrial EquipmentRating: 4.5 out of 5 stars4.5/5 (3)
- Fei Fe-5440a Td1251uDocument752 pagesFei Fe-5440a Td1251uKen Eckert100% (1)
- TN16 - Sensor Selection GuideDocument13 pagesTN16 - Sensor Selection GuideAsitha KulasekeraNo ratings yet
- Vibrational Sensors For Sensing Energy Through VibrationsDocument21 pagesVibrational Sensors For Sensing Energy Through VibrationsvijayrajanaNo ratings yet
- Vib - AccelerometerDocument16 pagesVib - AccelerometerMahmoud SobhyNo ratings yet
- Accelerometer Application Focus On Seismic Sensors: Home Rental Excitation Electronics Industrial NDTDocument2 pagesAccelerometer Application Focus On Seismic Sensors: Home Rental Excitation Electronics Industrial NDTLake HouseNo ratings yet
- Improving Low Frequency Vibration AnalysisDocument21 pagesImproving Low Frequency Vibration AnalysisMohd Asiren Mohd SharifNo ratings yet
- Vibrationsensor 171204042110Document18 pagesVibrationsensor 171204042110DRathikaNo ratings yet
- NOTES 4 Sensors For Vibration MeasurementDocument77 pagesNOTES 4 Sensors For Vibration MeasurementmanishpaliNo ratings yet
- Vibration Measurement Handbook MideDocument14 pagesVibration Measurement Handbook MideJason Drake100% (1)
- Accelerometer TypesDocument12 pagesAccelerometer TypesNitin MaliNo ratings yet
- ASSIGNMENT2 Mech Vibration F2019Document27 pagesASSIGNMENT2 Mech Vibration F2019AbdulrehmanNo ratings yet
- What's The Difference Between Capacitive and Thermal Inclination Sensors ?Document5 pagesWhat's The Difference Between Capacitive and Thermal Inclination Sensors ?Antonio TakeshiNo ratings yet
- NI Tutorial 13654Document6 pagesNI Tutorial 13654Rodrigo SerranoNo ratings yet
- Taimoor Inayat Assi 3Document10 pagesTaimoor Inayat Assi 3Charsi 1080No ratings yet
- Proximity - Sensor EI 44Document27 pagesProximity - Sensor EI 44Swarndeep KushariNo ratings yet
- Steps To Selecting The Right AccelerometerDocument7 pagesSteps To Selecting The Right Accelerometerpunith666No ratings yet
- Iot For Engineers Ece3501 Digital Assignment-1: L.Anirudh 18bec0559Document28 pagesIot For Engineers Ece3501 Digital Assignment-1: L.Anirudh 18bec0559anirudh lakshminarasimhanNo ratings yet
- Accelerometer Selection and InstallationDocument16 pagesAccelerometer Selection and InstallationLake HouseNo ratings yet
- Noise &vibration Measurement Techniques in Automotive NVH: Manasi P. Joshi, E. Ramachandran and N. V. KaranthDocument10 pagesNoise &vibration Measurement Techniques in Automotive NVH: Manasi P. Joshi, E. Ramachandran and N. V. KaranthmarcglebNo ratings yet
- Basic Theory Eddy CurrentDocument3 pagesBasic Theory Eddy Current586301No ratings yet
- Comparision of Torsional Vibration Measurement TechniquesDocument16 pagesComparision of Torsional Vibration Measurement TechniquesRikkinNo ratings yet
- Acoustic Emission Apparatus and Data Acquisition: Zohar Elman, Dr. Boris MuravinDocument45 pagesAcoustic Emission Apparatus and Data Acquisition: Zohar Elman, Dr. Boris MuravinRaghu KodiNo ratings yet
- Sensor PDFDocument8 pagesSensor PDFConstanzaNo ratings yet
- Sensores de Proximidade.Document48 pagesSensores de Proximidade.catraioNo ratings yet
- Accelerometer Selection Based On ApplicationsDocument8 pagesAccelerometer Selection Based On Applicationspatilrushal824No ratings yet
- IMI Sensors ShearvsCompressionDocument5 pagesIMI Sensors ShearvsCompressionTim StubbsNo ratings yet
- Solid State SensorsDocument39 pagesSolid State SensorsRona Mae Raza RecaldeNo ratings yet
- Inductive Proximity Sensors: Brett Anderson ECE 5230 Assignment #1Document27 pagesInductive Proximity Sensors: Brett Anderson ECE 5230 Assignment #1Rodz Gier JrNo ratings yet
- Seismic Velocity Transducers - Power-MI: Aug 21, 2023 2:18 PMDocument6 pagesSeismic Velocity Transducers - Power-MI: Aug 21, 2023 2:18 PMabdalla AljzNo ratings yet
- REDUCTION of The SKI SLOPE EFFECTDocument8 pagesREDUCTION of The SKI SLOPE EFFECTEnzo MarquesNo ratings yet
- Sensor Geophones BR 091509Document8 pagesSensor Geophones BR 091509Andy KurniyantoNo ratings yet
- High Speed Sensor, Detection and Its Schematic DiagramDocument18 pagesHigh Speed Sensor, Detection and Its Schematic DiagramjackNo ratings yet
- Sensors and Transducers OverviewDocument77 pagesSensors and Transducers OverviewVarunNo ratings yet
- On Tap Phan 2 AEDocument9 pagesOn Tap Phan 2 AEduy.leanh87No ratings yet
- Introduction To Instrumentation (Eeng4183) : by Tesfamichael ADocument24 pagesIntroduction To Instrumentation (Eeng4183) : by Tesfamichael ADagnachew AzeneNo ratings yet
- Describe Different Types of AccelerometersDocument7 pagesDescribe Different Types of AccelerometersRotin PierreNo ratings yet
- Vibration Sensor CatalogoDocument96 pagesVibration Sensor CatalogoWolfgang FeddersenNo ratings yet
- Vibration Sensors CatalogDocument104 pagesVibration Sensors CatalogRodrigo Hernández AbarzúaNo ratings yet
- Selection of Transducer For Flow Rate Measurement SystemDocument10 pagesSelection of Transducer For Flow Rate Measurement SystemRusydi JamainNo ratings yet
- SensorsDocument37 pagesSensorsFederico EstradaNo ratings yet
- 2 Sensors and TransducersDocument83 pages2 Sensors and TransducersJEYAVEL PALANISAMYNo ratings yet
- Piezoelectric Accelerometers: Lecture-5 Industrial ElectronicsDocument17 pagesPiezoelectric Accelerometers: Lecture-5 Industrial ElectronicsramprabhakarjNo ratings yet
- Sensor Technology: With Modern Protection and Control IedsDocument2 pagesSensor Technology: With Modern Protection and Control IedsngocanhvyNo ratings yet
- How Does A Piezo-Electric Accelerometer Work?Document19 pagesHow Does A Piezo-Electric Accelerometer Work?Sri SaiNo ratings yet
- Vibration Sensors - SKFDocument44 pagesVibration Sensors - SKFnekoNcen100% (1)
- Reed Sensors vs. Hall Effect SensorsDocument3 pagesReed Sensors vs. Hall Effect SensorsantamanNo ratings yet
- Sensor Signal ConditioningDocument9 pagesSensor Signal ConditioningMariia Paula AriinNo ratings yet
- New Sensor Technology For Measuring Torsional Shaft Vibration in Turbine GeneratorsDocument8 pagesNew Sensor Technology For Measuring Torsional Shaft Vibration in Turbine GeneratorssebastianNo ratings yet
- Vibration SensorsDocument44 pagesVibration SensorsLarry Vilca DelgadoNo ratings yet
- QSonic Brochure 209Document12 pagesQSonic Brochure 209Anish DonaldNo ratings yet
- Festo SensorDocument22 pagesFesto SensorBRYSHARDS100% (1)
- Sensors and Control ConsiderationsDocument3 pagesSensors and Control ConsiderationsPrashanth BnNo ratings yet
- The Guideline To Motion Sensors For BeginnerDocument10 pagesThe Guideline To Motion Sensors For BeginnerjackNo ratings yet
- MEMS Accelerometers: Testing and Practical Approach For Smart Sensing and Machinery DiagnosticsDocument23 pagesMEMS Accelerometers: Testing and Practical Approach For Smart Sensing and Machinery DiagnosticsRafael Lemanski Dos SantosNo ratings yet
- Advanced SensorsDocument23 pagesAdvanced SensorsAzharuddin Mansoori100% (1)
- Measurement System Analysis For Continuous Quality Improvement in Automobile Smes: Multiple Case StudyDocument16 pagesMeasurement System Analysis For Continuous Quality Improvement in Automobile Smes: Multiple Case StudyMajid TorabiNo ratings yet
- O Ring Shelf Life Chart PDFDocument1 pageO Ring Shelf Life Chart PDFMajid TorabiNo ratings yet
- Cross Industry Process CL Assification Framework: HistoryDocument27 pagesCross Industry Process CL Assification Framework: HistoryMajid TorabiNo ratings yet
- Araldite AV 138M-1 With Hardener HV 998: Advanced MaterialsDocument4 pagesAraldite AV 138M-1 With Hardener HV 998: Advanced MaterialsMajid TorabiNo ratings yet
- WELDING INSPECTION: Welding Gauges: Hi-Lo Weld Gauges (Gal) "V-WAC"Document1 pageWELDING INSPECTION: Welding Gauges: Hi-Lo Weld Gauges (Gal) "V-WAC"Majid TorabiNo ratings yet
- Key Pump MaterialsDocument1 pageKey Pump MaterialsMajid TorabiNo ratings yet
- Lecture 6 Thin Film Deposition, Physical Vapour DepositionDocument44 pagesLecture 6 Thin Film Deposition, Physical Vapour DepositionHari HarryNo ratings yet
- Vectron OcxoDocument7 pagesVectron Ocxob33g33No ratings yet
- Elements of Telecommunications PDFDocument235 pagesElements of Telecommunications PDFAlexandra100% (1)
- Adc 5100 SeriesDocument2 pagesAdc 5100 SeriesLaurentiu IacobNo ratings yet
- PDS-16002 JMS578 Datasheet (Rev. 1.01)Document23 pagesPDS-16002 JMS578 Datasheet (Rev. 1.01)kok86845No ratings yet
- Application Note: Recommendations For Best Performance: Wireless & Sensing ProductsDocument16 pagesApplication Note: Recommendations For Best Performance: Wireless & Sensing Productsxyc0nNo ratings yet
- AN588 OsciladoresDocument19 pagesAN588 Osciladoresnouz_hpNo ratings yet
- Arduino Based RADAR SystemDocument33 pagesArduino Based RADAR SystemKamalJeet Singh100% (5)
- Tda 3566Document24 pagesTda 3566dragon-red0816No ratings yet
- Forma CalibraciónDocument7 pagesForma CalibracióndeivisroseroNo ratings yet
- RF02 Universal ISM Band FSK Transmitter: DescriptionDocument24 pagesRF02 Universal ISM Band FSK Transmitter: DescriptionMUHAMMAD SISWANTORONo ratings yet
- Low-Cost Low-Power 2.4 GHZ RF Transceiver: ApplicationsDocument96 pagesLow-Cost Low-Power 2.4 GHZ RF Transceiver: ApplicationsyandexNo ratings yet
- 5051 AppDocument37 pages5051 AppawemetalNo ratings yet
- Radio TransmissionDocument16 pagesRadio TransmissionKing EzraNo ratings yet
- CSR BC417 DatasheetDocument116 pagesCSR BC417 DatasheetChấm Hết100% (2)
- ADE7880 Medidor de EnergiaDocument104 pagesADE7880 Medidor de EnergiaJeziel Vazquez NavaNo ratings yet
- Kinetic Study of Copper Chemistry in Chemical Mechanical PolishinDocument171 pagesKinetic Study of Copper Chemistry in Chemical Mechanical Polishinmuhammad ismailNo ratings yet
- Automatic College Bell 3Document26 pagesAutomatic College Bell 3Koshy Geoji86% (7)
- Extremely Accurate I C-Integrated RTC/TCXO/Crystal: General Description FeaturesDocument20 pagesExtremely Accurate I C-Integrated RTC/TCXO/Crystal: General Description Features21xim21No ratings yet
- Catalogue ViaXys Accelerometres LaboDocument70 pagesCatalogue ViaXys Accelerometres LaboRenan Rodrigues DuarteNo ratings yet
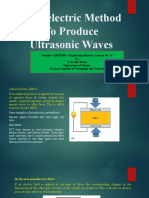
- Ultrasonic Wave Production-Piezoelectric MethodDocument6 pagesUltrasonic Wave Production-Piezoelectric MethodNIKHIL SOLOMON P URK19CS1045No ratings yet
- AN1208: Choosing The Correct Oscillator To Meet Your IEEE 1588v2 Network Synchronization Holdover RequirementsDocument17 pagesAN1208: Choosing The Correct Oscillator To Meet Your IEEE 1588v2 Network Synchronization Holdover Requirementsreza_azadNo ratings yet
- Multilayer Integrated Film Bulk Acoustic Resonators - Yafei Zhang, Da ChenDocument158 pagesMultilayer Integrated Film Bulk Acoustic Resonators - Yafei Zhang, Da ChenSasaNo ratings yet
- A History of The Rubidium Frequency StandardDocument35 pagesA History of The Rubidium Frequency StandardJelena Blagojevic-IgnjatovicNo ratings yet
- Circuit Description 3624Document5 pagesCircuit Description 3624ashokvaasanNo ratings yet
- Tutorial (Quartz Crystal Resonators and Oscillators) (John R. Vig)Document308 pagesTutorial (Quartz Crystal Resonators and Oscillators) (John R. Vig)Марко Д. СтанковићNo ratings yet
- UCMP PPT Updated 30jan20 - 1Document261 pagesUCMP PPT Updated 30jan20 - 1Mr Yasin Mech StaffNo ratings yet
- VHF ConceptDocument29 pagesVHF ConceptSrikar DattaNo ratings yet
- Silica Sand 3452Document16 pagesSilica Sand 3452RajjeshRoshan100% (2)