Download as pdf or txt
You might also like
- Homework For Module 5 : Quiz, 19 QuestionsDocument13 pagesHomework For Module 5 : Quiz, 19 QuestionsJustin Jose P33% (3)
- Exam 1 Solution 072017 CDocument10 pagesExam 1 Solution 072017 CAmanuel MulatNo ratings yet
- Blood Bank Report PDFDocument101 pagesBlood Bank Report PDFVinutha MNo ratings yet
- Tables of Common Transform Pairs: Notation, Conventions, and Useful FormulasDocument6 pagesTables of Common Transform Pairs: Notation, Conventions, and Useful FormulassisoNo ratings yet
- Quantum Field Theory 1 Homework 2Document11 pagesQuantum Field Theory 1 Homework 2Arjun DeyNo ratings yet
- Assignment #00 - Solution ManualDocument11 pagesAssignment #00 - Solution Manualعمار طعمةNo ratings yet
- Tables of Common Transform Pairs: Notation, Conventions, and Useful FormulasDocument6 pagesTables of Common Transform Pairs: Notation, Conventions, and Useful FormulasKakitani MusicNo ratings yet
- Stat 245 Homework 3 SolutionDocument8 pagesStat 245 Homework 3 SolutionyoachallengeNo ratings yet
- FormulaDocument2 pagesFormulaFarid ImranNo ratings yet
- Lec6 PDFDocument46 pagesLec6 PDFTrần Nhật DươngNo ratings yet
- Udomboso 2013 - On Some Properties of A Heterogeneous Transfer ...Document10 pagesUdomboso 2013 - On Some Properties of A Heterogeneous Transfer ...wilkerjsNo ratings yet
- MATE2A2 Test 2 2021Document2 pagesMATE2A2 Test 2 2021Pride PuleNo ratings yet
- Laplace Transform SBDocument11 pagesLaplace Transform SBAnimeNo ratings yet
- 14 Feb RevolutionDocument11 pages14 Feb RevolutionnhuzoraNo ratings yet
- Assignment in Advanced Quantum MechanicsDocument2 pagesAssignment in Advanced Quantum MechanicsdivyaNo ratings yet
- Ee342 Final Cheat SheetDocument1 pageEe342 Final Cheat SheetShane TakamuneNo ratings yet
- Stat 210B HWK #5 Solutions: Garvesh RaskuttiDocument5 pagesStat 210B HWK #5 Solutions: Garvesh RaskuttiDaniyal AsifNo ratings yet
- I / & P Á Þ o Æ II (MATH162)Document3 pagesI / & P Á Þ o Æ II (MATH162)서정민No ratings yet
- Signals 1Document10 pagesSignals 1Akshit MathurNo ratings yet
- Solutions 4: Free Quantum Field TheoryDocument22 pagesSolutions 4: Free Quantum Field Theoryahmed aliNo ratings yet
- MIT8 324F10 Lecture8Document6 pagesMIT8 324F10 Lecture8Ayham ziadNo ratings yet
- Cvit FT Derivation PDFDocument2 pagesCvit FT Derivation PDFBlazeBlack54No ratings yet
- Cvit FT Derivation PDFDocument2 pagesCvit FT Derivation PDFkrishnaNo ratings yet
- FT HoDocument2 pagesFT HoSaeed MalkyNo ratings yet
- Finite Difference Method For Boundary Value Problems PDFDocument2 pagesFinite Difference Method For Boundary Value Problems PDFMikhail TabucalNo ratings yet
- Estimating Probabilities From Data: I N I 1 D IDocument4 pagesEstimating Probabilities From Data: I N I 1 D Ijeremy wangNo ratings yet
- Giang Summary Local DCDocument6 pagesGiang Summary Local DCGiangNo ratings yet
- Week 9 - Classical Fluctuation Dissipation Theorem: I. Langevin EquationDocument4 pagesWeek 9 - Classical Fluctuation Dissipation Theorem: I. Langevin EquationAkshaya Kumar RathNo ratings yet
- Probability Theory Notes Chapter 2 VaradhanDocument20 pagesProbability Theory Notes Chapter 2 VaradhanJimmyNo ratings yet
- Stats 2090 - Hypothesis TestingDocument15 pagesStats 2090 - Hypothesis Testingkatelyntitus9No ratings yet
- MIT2 71S09 Usol7Document16 pagesMIT2 71S09 Usol7Stephanie Carolina Cely RodriguezNo ratings yet
- EDAT - Lab 03 - Matrix and Haralick Textures: Christian E. Portugal-ZambranoDocument8 pagesEDAT - Lab 03 - Matrix and Haralick Textures: Christian E. Portugal-ZambranoCARLOS ALBERTO MESTAS ESCARCENANo ratings yet
- Signals and Waves Part CDocument69 pagesSignals and Waves Part CCyber CityNo ratings yet
- Chap1 Jan.23Document83 pagesChap1 Jan.23yamen.nasser7No ratings yet
- Physics 70007, Fall 2009 Answers To HW Set #1: September 27, 2009Document5 pagesPhysics 70007, Fall 2009 Answers To HW Set #1: September 27, 2009Alba lucy salazar londoñoNo ratings yet
- Compact Subsets of L Spaces: N Sup P P PDocument6 pagesCompact Subsets of L Spaces: N Sup P P PArkadev GhoshNo ratings yet
- Archive Appm2360spring2021exam1 SolDocument5 pagesArchive Appm2360spring2021exam1 Solemmaagoh123No ratings yet
- Fourier TransformsDocument1 pageFourier TransformsakshayNo ratings yet
- Numerical Path Integrals: Austin LiuDocument32 pagesNumerical Path Integrals: Austin LiuAustin Yu LiuNo ratings yet
- 2000 Commutators of Hardy OperatorsDocument19 pages2000 Commutators of Hardy OperatorsUMAIR ASHFAQNo ratings yet
- Statistics 580 Maximum Likelihood Estimation: 1 2 N 0 N 1 P 0 PDocument25 pagesStatistics 580 Maximum Likelihood Estimation: 1 2 N 0 N 1 P 0 PTawsif HasanNo ratings yet
- TOH NotesDocument8 pagesTOH NotesjonieokeloeNo ratings yet
- Part IB Methods Example Sheet 1Document2 pagesPart IB Methods Example Sheet 1Salman KhanNo ratings yet
- Statistics 580 The EM AlgorithmDocument28 pagesStatistics 580 The EM AlgorithmyanxiaNo ratings yet
- Note 4: EECS 189 Introduction To Machine Learning Fall 2020 1 MLE and MAP For Regression (Part I)Document6 pagesNote 4: EECS 189 Introduction To Machine Learning Fall 2020 1 MLE and MAP For Regression (Part I)Rohan DebNo ratings yet
- Exam2 SolutionsDocument5 pagesExam2 SolutionsabayteshomeNo ratings yet
- DerivationDocument14 pagesDerivationAhmed OokaNo ratings yet
- 1 Solution To Problem 8.1Document16 pages1 Solution To Problem 8.1HaiderNo ratings yet
- MIT8 324F10 Lecture11Document5 pagesMIT8 324F10 Lecture11Ayham ziadNo ratings yet
- Laplace Transform: F (P) F (T) DTDocument4 pagesLaplace Transform: F (P) F (T) DTmarkjoessethNo ratings yet
- Probability & Random Process Formulas All UnitsDocument10 pagesProbability & Random Process Formulas All UnitsSijilNo ratings yet
- Phys561!4!2015 SolutionsDocument10 pagesPhys561!4!2015 SolutionsSubhadip PalNo ratings yet
- Fysikk Tabell UK 2015-2016Document2 pagesFysikk Tabell UK 2015-2016Maga KhadisovNo ratings yet
- ProbabilityDocument7 pagesProbabilityAnila VsNo ratings yet
- 14-10 ExptDocument12 pages14-10 ExptVarjula BalakrishnaNo ratings yet
- Examples of Variational Inference With Gaussian-Gamma DistributionDocument6 pagesExamples of Variational Inference With Gaussian-Gamma DistributionJun WangNo ratings yet
- Spring 2010Document3 pagesSpring 2010Robinson Ortega MezaNo ratings yet
- GriffithsQMCh2p10 PDFDocument10 pagesGriffithsQMCh2p10 PDFMark CarpesoNo ratings yet
- Maths Project WomenDocument10 pagesMaths Project WomenindramuniNo ratings yet
- The Spectral Theory of Toeplitz Operators. (AM-99), Volume 99From EverandThe Spectral Theory of Toeplitz Operators. (AM-99), Volume 99No ratings yet
- Green's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)From EverandGreen's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)No ratings yet
- Google Cloud Engineer Interview ExperienceDocument2 pagesGoogle Cloud Engineer Interview ExperienceShaik Mahammad AlthafNo ratings yet
- History of Bellakar: Adapted and Modified From Bellakar (2001) by Eric DubourgDocument11 pagesHistory of Bellakar: Adapted and Modified From Bellakar (2001) by Eric DubourgFabien WeissgerberNo ratings yet
- File Handling in Python (Binary Files)Document11 pagesFile Handling in Python (Binary Files)VidushiNo ratings yet
- Practicedump: Free Practice Dumps - Unlimited Free Access of Practice ExamDocument5 pagesPracticedump: Free Practice Dumps - Unlimited Free Access of Practice ExamManish RanjanNo ratings yet
- Module 7Document11 pagesModule 7Αιμιλία ΙατρίδηNo ratings yet
- Wipro Written TestDocument7 pagesWipro Written TestMODUGULA SRINIVASA REDDYNo ratings yet
- Daisies (Chytilova, 1966) Presentation NotesDocument2 pagesDaisies (Chytilova, 1966) Presentation NotesJiayue ShiNo ratings yet
- Trabajo Práctico 1 - Texto PDFDocument2 pagesTrabajo Práctico 1 - Texto PDFrubenNo ratings yet
- UntitledDocument92 pagesUntitledKarolinaNo ratings yet
- Assigment C++: Bjarne StroustrupDocument4 pagesAssigment C++: Bjarne Stroustrupmuzammir azmanNo ratings yet
- Report WritingDocument8 pagesReport WritingShilpa SharmaNo ratings yet
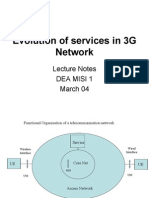
- Evolution of Services in 3G Network: Lecture Notes Dea Misi 1 March 04Document81 pagesEvolution of Services in 3G Network: Lecture Notes Dea Misi 1 March 04Hao NguyenNo ratings yet
- Space - The Sun, Moon, Stars and Planets: Lesson PlanDocument2 pagesSpace - The Sun, Moon, Stars and Planets: Lesson PlanRobert FlynnNo ratings yet
- Yureka Education Center: Lembaga Kursus Dan PelatihanDocument2 pagesYureka Education Center: Lembaga Kursus Dan Pelatihancornel andreNo ratings yet
- Understanding Leonard CohenDocument5 pagesUnderstanding Leonard CohenTanya Klaes DemmingsNo ratings yet
- TE ASSIGNMENT Case StudyDocument5 pagesTE ASSIGNMENT Case StudyNabeel AhmedNo ratings yet
- Saving Our PrepositionsDocument150 pagesSaving Our Prepositionsuseyourname100% (17)
- Detailed Lesson Plan in MapehDocument13 pagesDetailed Lesson Plan in MapehEmily Grace OralloNo ratings yet
- SFML Game Development by Example - Sample ChapterDocument24 pagesSFML Game Development by Example - Sample ChapterPackt PublishingNo ratings yet
- Victor Hugo Reverie DissertationDocument4 pagesVictor Hugo Reverie DissertationBuyResumePaperSingapore100% (1)
- Installing Wireshark On Linux For OpenFlow Packet CapturesDocument13 pagesInstalling Wireshark On Linux For OpenFlow Packet CapturesRitu NathanNo ratings yet
- OOAD Lect9 Communication Timing Interaction DiagramsDocument30 pagesOOAD Lect9 Communication Timing Interaction DiagramsAsad AbbasNo ratings yet
- Analysis of Plates and Shells Using An Edge-Based Smoothed Finite Element MethodDocument16 pagesAnalysis of Plates and Shells Using An Edge-Based Smoothed Finite Element MethodRhatna kumala24No ratings yet
- Shs Oral-Comm q1 w3 Slm.Document23 pagesShs Oral-Comm q1 w3 Slm.Jhylanne khalia RoxasNo ratings yet
- A Brief List of Misused English Terminology in EU PublicationsDocument33 pagesA Brief List of Misused English Terminology in EU PublicationsJohn BondNo ratings yet
- How To Write A Poem Analysis EssayDocument15 pagesHow To Write A Poem Analysis EssayJennifer McAdamsNo ratings yet
- Indus Valley CivilizationDocument4 pagesIndus Valley CivilizationShebinNo ratings yet
- Se Monitoring ApiDocument57 pagesSe Monitoring ApiMichael BrownNo ratings yet