Download as pdf or txt
You might also like
- GTG Centaur 50 Turbomachinery PDFDocument86 pagesGTG Centaur 50 Turbomachinery PDFsparthaelf100% (2)
- Exam 11Document9 pagesExam 11Bakkari MehdiNo ratings yet
- Electromechanical Energy Conversion: Semester 1, 2022/23: 16 December 2022Document4 pagesElectromechanical Energy Conversion: Semester 1, 2022/23: 16 December 2022jefsharemusicNo ratings yet
- Faculty of Engineering and Science: Date December 15, 2016 Duration 4 HoursDocument6 pagesFaculty of Engineering and Science: Date December 15, 2016 Duration 4 HoursŸØüsap BasiliNo ratings yet
- Slot WindingDocument22 pagesSlot WindingFitri Senpai75% (4)
- ECE 320 Energy Conversion and Power Electronics: Chapter ObjectivesDocument7 pagesECE 320 Energy Conversion and Power Electronics: Chapter ObjectivesHüseyin Murat PolaterNo ratings yet
- AssignmentsDocument28 pagesAssignmentsaly.abdulghafarNo ratings yet
- Leb30303-Electro Technique 2Document7 pagesLeb30303-Electro Technique 2Alif AkmalNo ratings yet
- Homwork May DienDocument2 pagesHomwork May DienBk DecNo ratings yet
- EMII - Lecture 18 - Induction MachinesDocument14 pagesEMII - Lecture 18 - Induction MachinesHassan Al BaityNo ratings yet
- Engi4258 Assignments Set1 SolutionsDocument29 pagesEngi4258 Assignments Set1 SolutionscristinacintiaNo ratings yet
- The University of New South Wales Final Examination JUNE 2005Document5 pagesThe University of New South Wales Final Examination JUNE 2005Andrew XieNo ratings yet
- 9A02505 Electrical Machines-IIIDocument4 pages9A02505 Electrical Machines-IIIsivabharathamurthyNo ratings yet
- Introduction To Electrical Machines EMG (Copy)Document6 pagesIntroduction To Electrical Machines EMG (Copy)Ian PhilipNo ratings yet
- bt31R0719 p1 19 11 09rahulDocument29 pagesbt31R0719 p1 19 11 09rahulpravallika1210No ratings yet
- Massachusetts Institute of TechnologyDocument6 pagesMassachusetts Institute of TechnologyengshimaaNo ratings yet
- Machines Tutorial Sheet #3 (2024)Document4 pagesMachines Tutorial Sheet #3 (2024)Riya KoretiNo ratings yet
- Civil Services - Electrical Main Paper I & II - 1992-2012 - 7.6MBDocument253 pagesCivil Services - Electrical Main Paper I & II - 1992-2012 - 7.6MBAnika DixitNo ratings yet
- Question Paper Code:: Reg. No.Document4 pagesQuestion Paper Code:: Reg. No.gokulchandruNo ratings yet
- T.E Electrical QP2Document36 pagesT.E Electrical QP2Omkar SheteNo ratings yet
- Simulation and Analysis Calculation of PMBLDCM Based On Time-Stepping Finite Element and Matlab MethodsDocument4 pagesSimulation and Analysis Calculation of PMBLDCM Based On Time-Stepping Finite Element and Matlab Methodsபொன்னியின் செல்வன்No ratings yet
- Solucion Cap 4 ChapmanDocument6 pagesSolucion Cap 4 ChapmanEduardo Llanos CruzNo ratings yet
- Question Paper Code:: Reg. No.Document3 pagesQuestion Paper Code:: Reg. No.BALAKRISHNANNo ratings yet
- R10 Set No: 2Document2 pagesR10 Set No: 2Rishika ThakurNo ratings yet
- The Synchronous Machine: Experiment No. 5Document10 pagesThe Synchronous Machine: Experiment No. 5Prashant JhaNo ratings yet
- DC MachineDocument33 pagesDC MachineJevon WilsonNo ratings yet
- 1 The Four Quadrant DC-DC ConverterDocument3 pages1 The Four Quadrant DC-DC ConverterZaidBNo ratings yet
- Problems - Chapter 4 1 PDFDocument7 pagesProblems - Chapter 4 1 PDFjohn romel mojicaNo ratings yet
- DC MachinesDocument102 pagesDC MachinesmohamedashrafkotpNo ratings yet
- DC Machine PDFDocument35 pagesDC Machine PDFPulkit Kumar Chauhan92% (24)
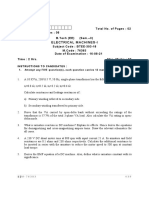
- Full Marks: 50 Duration: 3 HoursDocument2 pagesFull Marks: 50 Duration: 3 HoursK JaiswalNo ratings yet
- Final 373 S11 PracticeExamDocument10 pagesFinal 373 S11 PracticeExamtbombNo ratings yet
- Ec5040 16.02.2024Document12 pagesEc5040 16.02.2024Wonder KingNo ratings yet
- Synchronous Machine Problems With SolutionsDocument34 pagesSynchronous Machine Problems With Solutionsgsantosh06No ratings yet
- GP FileDocument14 pagesGP FileVikri RahmatNo ratings yet
- Edexcel National Certificate/Diploma Unit 67 - Further Electrical Principles NQF Level 3 Outcome 1 Tutorial 3 - Direct Current MotorsDocument11 pagesEdexcel National Certificate/Diploma Unit 67 - Further Electrical Principles NQF Level 3 Outcome 1 Tutorial 3 - Direct Current MotorsRem AremaniaNo ratings yet
- Even EEDocument7 pagesEven EEFelix Mar Colipano EspejoNo ratings yet
- Electrical Machines-I: Inst Ruct Ions T O Cand Idat EsDocument2 pagesElectrical Machines-I: Inst Ruct Ions T O Cand Idat EsGurjinder SinghNo ratings yet
- Power Systems AssignmentDocument12 pagesPower Systems AssignmentJbmulindwaNo ratings yet
- EE 2022 Electrical Machines & Drives IDocument3 pagesEE 2022 Electrical Machines & Drives Imihir.rc.uomNo ratings yet
- Question Paper Code:: Reg. No.Document3 pagesQuestion Paper Code:: Reg. No.vnatarajanNo ratings yet
- AC Drives: Dr. Adel A. El-Samahy Department of Electrical Engineering University of HelwanDocument25 pagesAC Drives: Dr. Adel A. El-Samahy Department of Electrical Engineering University of Helwanadelelsamahy5958No ratings yet
- DC MachinesDocument44 pagesDC Machinesselvithimmarajan@gmail.comNo ratings yet
- Unit 6 Alternator (Synchronous Generator) : StructureDocument29 pagesUnit 6 Alternator (Synchronous Generator) : StructureMahir Asif Shadman100% (1)
- Nov 2007Document8 pagesNov 2007Viswa ChaitanyaNo ratings yet
- Electrical - Machines - IiiDocument8 pagesElectrical - Machines - IiiHarinath CNo ratings yet
- Electrical Power Systems: Synchronous GeneratorDocument54 pagesElectrical Power Systems: Synchronous GeneratorNorhatini Ibrahim100% (1)
- The University of New South Wales Final Examination JUNE 2002Document6 pagesThe University of New South Wales Final Examination JUNE 2002Andrew XieNo ratings yet
- Synchronous MachineDocument24 pagesSynchronous MachineNur AinaqilahNo ratings yet
- Exp5 WORDDocument6 pagesExp5 WORDMajdy gamingNo ratings yet
- c8 PDFDocument64 pagesc8 PDFAnjaana PrashantNo ratings yet
- BEEE - Unit - II - QBDocument6 pagesBEEE - Unit - II - QBSweetlineSoniaNo ratings yet
- BLDC Under Load PDFDocument9 pagesBLDC Under Load PDFAhmed ShoeebNo ratings yet
- Power System Transient Analysis: Theory and Practice using Simulation Programs (ATP-EMTP)From EverandPower System Transient Analysis: Theory and Practice using Simulation Programs (ATP-EMTP)No ratings yet
- Resistivity Modeling: Propagation, Laterolog and Micro-Pad AnalysisFrom EverandResistivity Modeling: Propagation, Laterolog and Micro-Pad AnalysisNo ratings yet
- Fundamentals of Electronics 1: Electronic Components and Elementary FunctionsFrom EverandFundamentals of Electronics 1: Electronic Components and Elementary FunctionsNo ratings yet
- Influence of System Parameters Using Fuse Protection of Regenerative DC DrivesFrom EverandInfluence of System Parameters Using Fuse Protection of Regenerative DC DrivesNo ratings yet
- Electron Beam-Specimen Interactions and Simulation Methods in MicroscopyFrom EverandElectron Beam-Specimen Interactions and Simulation Methods in MicroscopyNo ratings yet
- Enfield Bullet Workshop Manual 2000 2 PDFDocument53 pagesEnfield Bullet Workshop Manual 2000 2 PDFsivakumar natarajanNo ratings yet
- Speed Control Methods of Various Types of Speed Control Motors by Kazuya SHIRAHATADocument9 pagesSpeed Control Methods of Various Types of Speed Control Motors by Kazuya SHIRAHATAchrist_f2009No ratings yet
- Comparing Differences Estrella Delta Vs Part WindingDocument2 pagesComparing Differences Estrella Delta Vs Part WindingTheophilus Oduro-NyarkoNo ratings yet
- Electrical Carjack PDFDocument60 pagesElectrical Carjack PDFAj KNo ratings yet
- DC Motor - Parts & WorkingDocument80 pagesDC Motor - Parts & WorkingMuskan GoyalNo ratings yet
- Laboratory Experiment 1Document4 pagesLaboratory Experiment 1Mark Jomel MangampoNo ratings yet
- EF-35 - Service ManualDocument53 pagesEF-35 - Service ManualsudalfaNo ratings yet
- Z 300 K / July 2000Document22 pagesZ 300 K / July 2000samityNo ratings yet
- Standard Specification For MotorDocument13 pagesStandard Specification For MotorSubhendu JanaNo ratings yet
- Generators Provide Power : in This IssueDocument12 pagesGenerators Provide Power : in This Issuemanu_chatNo ratings yet
- DC Generator - Construction, Working Principle, Types, and Applications PDFDocument1 pageDC Generator - Construction, Working Principle, Types, and Applications PDFGokul GokulNo ratings yet
- Machines Lab ManualDocument124 pagesMachines Lab ManualpurushothNo ratings yet
- Power Factory ManualDocument190 pagesPower Factory Manualkriznar100% (1)
- Magnetic Gear MechanismDocument9 pagesMagnetic Gear MechanismPraveen DNo ratings yet
- MEA Testing Systems LTD CatalogDocument105 pagesMEA Testing Systems LTD CatalogPawin lothongNo ratings yet
- Starting Method1Document6 pagesStarting Method1neo100% (5)
- R5410202 Power Semiconductor DrivesDocument1 pageR5410202 Power Semiconductor DrivessivabharathamurthyNo ratings yet
- Mechanical Engineering Department: PPT On Automobile EngineeringDocument147 pagesMechanical Engineering Department: PPT On Automobile EngineeringMuhammad Hamza TahirNo ratings yet
- Transfer Function of A PMDC MotorDocument6 pagesTransfer Function of A PMDC MotorKenneth TanNo ratings yet
- Unit5 LMDocument13 pagesUnit5 LMsatyakar_vvkNo ratings yet
- CD Fe Iii 001 V20 enDocument13 pagesCD Fe Iii 001 V20 enOmar AlhadyNo ratings yet
- Data Sheet Stamford UCI274E1-Wending 311-3 PhaseDocument9 pagesData Sheet Stamford UCI274E1-Wending 311-3 PhaseCimmangNo ratings yet
- PatenDocument18 pagesPatenMuhammad YanuarNo ratings yet
- GPN012 KW 6 PDFDocument8 pagesGPN012 KW 6 PDFAnonymous RvcMu1mNo ratings yet
- Regenerative Braking Control of Brushless DC Motors With Type 2 Fuzzy Logic ControllerDocument11 pagesRegenerative Braking Control of Brushless DC Motors With Type 2 Fuzzy Logic ControllerToàn Huu NguyenNo ratings yet
- Speed Control of Three Phase Induction MotorDocument28 pagesSpeed Control of Three Phase Induction MotorRajeev Valunjkar100% (1)
- Three Phase Induction Motor ReportDocument24 pagesThree Phase Induction Motor ReportSiddharth NandhanNo ratings yet
- Electrical Machine & Control SystemsDocument24 pagesElectrical Machine & Control SystemsHatem DheerNo ratings yet
- Module 3 QsDocument44 pagesModule 3 QsSatishReddy100% (1)