
10 - Chapter 2 PDF
10 - Chapter 2 PDF
You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5823)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1093)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (852)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (590)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (898)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (541)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (349)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (823)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (403)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Samsung Lcd-Monitor 941mp, 741mp Ch. Ls19doa, Ls17doaDocument91 pagesSamsung Lcd-Monitor 941mp, 741mp Ch. Ls19doa, Ls17doakernchiaNo ratings yet
- Minimum Qualification and ExperienceDocument5 pagesMinimum Qualification and ExperiencePardha Saradhi JNo ratings yet
- Southern Power Distribution Company of Andhra Pradesh LimitedDocument1 pageSouthern Power Distribution Company of Andhra Pradesh LimitedPardha Saradhi JNo ratings yet
- Solar RadiationDocument17 pagesSolar RadiationPardha Saradhi JNo ratings yet
- Solar Power Plant CompleteDocument53 pagesSolar Power Plant CompletePardha Saradhi JNo ratings yet
- Available Energy Resources in Rural India: Dr. Basudev PradhanDocument35 pagesAvailable Energy Resources in Rural India: Dr. Basudev PradhanPardha Saradhi JNo ratings yet
- 135-Wind Farm To Weak-Grid Connection 2003Document80 pages135-Wind Farm To Weak-Grid Connection 2003Pardha Saradhi JNo ratings yet
- Switchgear and Protection: CH Hari PrasadDocument54 pagesSwitchgear and Protection: CH Hari PrasadPardha Saradhi JNo ratings yet
- Ieee Word Format A4 PDFDocument4 pagesIeee Word Format A4 PDFPardha Saradhi JNo ratings yet
- Author 'S Accepted ManuscriptDocument36 pagesAuthor 'S Accepted ManuscriptPardha Saradhi JNo ratings yet
- Appendix: Table A1.1 Results Obtained From VSC-STATCOM ControlDocument9 pagesAppendix: Table A1.1 Results Obtained From VSC-STATCOM ControlPardha Saradhi JNo ratings yet
- 11 - Chapter 3 PDFDocument55 pages11 - Chapter 3 PDFPardha Saradhi JNo ratings yet
- 14 - Conclusion and Scope For Future Work PDFDocument3 pages14 - Conclusion and Scope For Future Work PDFPardha Saradhi JNo ratings yet
- Section-I: Sub. Name: Energy Conservation and AuditDocument2 pagesSection-I: Sub. Name: Energy Conservation and AuditPardha Saradhi JNo ratings yet
- AICTE Model Curriculum 23-04-18Document14 pagesAICTE Model Curriculum 23-04-18Pardha Saradhi JNo ratings yet
- Tentative Schedule and Handbook of Participation in Online STCDocument2 pagesTentative Schedule and Handbook of Participation in Online STCPardha Saradhi JNo ratings yet
- Compaq Presario CQ45 SchematicsDocument48 pagesCompaq Presario CQ45 Schematicsmeng798651No ratings yet
- RLC CircuitDocument4 pagesRLC CircuitNicoleta PotîrnicheNo ratings yet
- KamDocument4 pagesKamRoyyan Hasmi FadhillahNo ratings yet
- Bruel & Kjaer Environmental Noise MeasurementDocument26 pagesBruel & Kjaer Environmental Noise MeasurementAnonymous Wyb8Y1No ratings yet
- User Manual: R&S Tsme Ultra Compact Drive Test ScannerDocument69 pagesUser Manual: R&S Tsme Ultra Compact Drive Test ScannerJohnNo ratings yet
- Polarization Controller Stanford LefevreDocument5 pagesPolarization Controller Stanford Lefevreapi-27533561No ratings yet
- Electrodeposition: January 2017Document22 pagesElectrodeposition: January 2017Jesús MorenoNo ratings yet
- Applied Electronics 05 Ec 64xxDocument60 pagesApplied Electronics 05 Ec 64xxwhiteelephant93No ratings yet
- Sony Dcr-Pc4e pc5 Pc5e Lev2 Ver1.1 PDFDocument174 pagesSony Dcr-Pc4e pc5 Pc5e Lev2 Ver1.1 PDFJan SoukupNo ratings yet
- PRM35 Projector User Guide PDFDocument53 pagesPRM35 Projector User Guide PDFAmet James Gonzalez GambinNo ratings yet
- Ower Lectronics (: Soft Switching (L40 - L41)Document7 pagesOwer Lectronics (: Soft Switching (L40 - L41)Mayank KashyapNo ratings yet
- AUXILIARES, SINALIZAÇÃO E RELÉ DE DISPARO RXMS-1, RXMA-1 e Etc 508015 (EN) PDFDocument20 pagesAUXILIARES, SINALIZAÇÃO E RELÉ DE DISPARO RXMS-1, RXMA-1 e Etc 508015 (EN) PDFleonardoNo ratings yet
- Ultrasonic Testing of Materials 155Document1 pageUltrasonic Testing of Materials 155joNo ratings yet
- Chapter 1-1 - Intro and Part 1 and 2Document59 pagesChapter 1-1 - Intro and Part 1 and 2Hanis SyafiqNo ratings yet
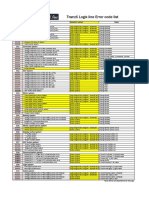
- Error Codes E-FLY M25Document1 pageError Codes E-FLY M25pavlik1No ratings yet
- Systems Analysis and Control: Matthew M. PeetDocument25 pagesSystems Analysis and Control: Matthew M. PeetMehadi Alom ChoudhuryNo ratings yet
- Mw61a Ti All Sv6.01a enDocument11 pagesMw61a Ti All Sv6.01a enpradeepNo ratings yet
- Review of DG Definitions and Its ImpactDocument7 pagesReview of DG Definitions and Its ImpactDrVikas Singh BhadoriaNo ratings yet
- Bus-Ele-Tech-Lib-Electrical-Formulas 2Document1 pageBus-Ele-Tech-Lib-Electrical-Formulas 2balbeloanna7No ratings yet
- 0625 w16 QP 42Document20 pages0625 w16 QP 42yuke kristinaNo ratings yet
- Cat6 STP Network Cables: CT6B1, CT6B2, CT6B6Document1 pageCat6 STP Network Cables: CT6B1, CT6B2, CT6B6SatyaNo ratings yet
- Coipier Equivalency ListDocument446 pagesCoipier Equivalency Listpanait30No ratings yet
- DENT 3563: Telecommunication EngineeringDocument42 pagesDENT 3563: Telecommunication EngineeringSanji KarunaNo ratings yet
- Transistor Darlinton d1414Document3 pagesTransistor Darlinton d1414Maria MarcanoNo ratings yet
- Datasheet OCP8162ADocument12 pagesDatasheet OCP8162AjaimeNo ratings yet
- Squid VSM Ulf Manual A0Document34 pagesSquid VSM Ulf Manual A0Javier Andres Munoz Chaves100% (1)
- Leroy Somer Rating Chart 4607j - enDocument24 pagesLeroy Somer Rating Chart 4607j - enEmraan MughalNo ratings yet
- 74HC02 74HCT02: 1. General DescriptionDocument12 pages74HC02 74HCT02: 1. General Descriptionforeman pemudaNo ratings yet
- Computer Aided ManufacturingDocument3 pagesComputer Aided ManufacturingVivek PatelNo ratings yet



















































































Download as pdf or txt
You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5823)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1093)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (852)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (590)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (898)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (541)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (349)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (823)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (403)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Samsung Lcd-Monitor 941mp, 741mp Ch. Ls19doa, Ls17doaDocument91 pagesSamsung Lcd-Monitor 941mp, 741mp Ch. Ls19doa, Ls17doakernchiaNo ratings yet
- Minimum Qualification and ExperienceDocument5 pagesMinimum Qualification and ExperiencePardha Saradhi JNo ratings yet
- Southern Power Distribution Company of Andhra Pradesh LimitedDocument1 pageSouthern Power Distribution Company of Andhra Pradesh LimitedPardha Saradhi JNo ratings yet
- Solar RadiationDocument17 pagesSolar RadiationPardha Saradhi JNo ratings yet
- Solar Power Plant CompleteDocument53 pagesSolar Power Plant CompletePardha Saradhi JNo ratings yet
- Available Energy Resources in Rural India: Dr. Basudev PradhanDocument35 pagesAvailable Energy Resources in Rural India: Dr. Basudev PradhanPardha Saradhi JNo ratings yet
- 135-Wind Farm To Weak-Grid Connection 2003Document80 pages135-Wind Farm To Weak-Grid Connection 2003Pardha Saradhi JNo ratings yet
- Switchgear and Protection: CH Hari PrasadDocument54 pagesSwitchgear and Protection: CH Hari PrasadPardha Saradhi JNo ratings yet
- Ieee Word Format A4 PDFDocument4 pagesIeee Word Format A4 PDFPardha Saradhi JNo ratings yet
- Author 'S Accepted ManuscriptDocument36 pagesAuthor 'S Accepted ManuscriptPardha Saradhi JNo ratings yet
- Appendix: Table A1.1 Results Obtained From VSC-STATCOM ControlDocument9 pagesAppendix: Table A1.1 Results Obtained From VSC-STATCOM ControlPardha Saradhi JNo ratings yet
- 11 - Chapter 3 PDFDocument55 pages11 - Chapter 3 PDFPardha Saradhi JNo ratings yet
- 14 - Conclusion and Scope For Future Work PDFDocument3 pages14 - Conclusion and Scope For Future Work PDFPardha Saradhi JNo ratings yet
- Section-I: Sub. Name: Energy Conservation and AuditDocument2 pagesSection-I: Sub. Name: Energy Conservation and AuditPardha Saradhi JNo ratings yet
- AICTE Model Curriculum 23-04-18Document14 pagesAICTE Model Curriculum 23-04-18Pardha Saradhi JNo ratings yet
- Tentative Schedule and Handbook of Participation in Online STCDocument2 pagesTentative Schedule and Handbook of Participation in Online STCPardha Saradhi JNo ratings yet
- Compaq Presario CQ45 SchematicsDocument48 pagesCompaq Presario CQ45 Schematicsmeng798651No ratings yet
- RLC CircuitDocument4 pagesRLC CircuitNicoleta PotîrnicheNo ratings yet
- KamDocument4 pagesKamRoyyan Hasmi FadhillahNo ratings yet
- Bruel & Kjaer Environmental Noise MeasurementDocument26 pagesBruel & Kjaer Environmental Noise MeasurementAnonymous Wyb8Y1No ratings yet
- User Manual: R&S Tsme Ultra Compact Drive Test ScannerDocument69 pagesUser Manual: R&S Tsme Ultra Compact Drive Test ScannerJohnNo ratings yet
- Polarization Controller Stanford LefevreDocument5 pagesPolarization Controller Stanford Lefevreapi-27533561No ratings yet
- Electrodeposition: January 2017Document22 pagesElectrodeposition: January 2017Jesús MorenoNo ratings yet
- Applied Electronics 05 Ec 64xxDocument60 pagesApplied Electronics 05 Ec 64xxwhiteelephant93No ratings yet
- Sony Dcr-Pc4e pc5 Pc5e Lev2 Ver1.1 PDFDocument174 pagesSony Dcr-Pc4e pc5 Pc5e Lev2 Ver1.1 PDFJan SoukupNo ratings yet
- PRM35 Projector User Guide PDFDocument53 pagesPRM35 Projector User Guide PDFAmet James Gonzalez GambinNo ratings yet
- Ower Lectronics (: Soft Switching (L40 - L41)Document7 pagesOwer Lectronics (: Soft Switching (L40 - L41)Mayank KashyapNo ratings yet
- AUXILIARES, SINALIZAÇÃO E RELÉ DE DISPARO RXMS-1, RXMA-1 e Etc 508015 (EN) PDFDocument20 pagesAUXILIARES, SINALIZAÇÃO E RELÉ DE DISPARO RXMS-1, RXMA-1 e Etc 508015 (EN) PDFleonardoNo ratings yet
- Ultrasonic Testing of Materials 155Document1 pageUltrasonic Testing of Materials 155joNo ratings yet
- Chapter 1-1 - Intro and Part 1 and 2Document59 pagesChapter 1-1 - Intro and Part 1 and 2Hanis SyafiqNo ratings yet
- Error Codes E-FLY M25Document1 pageError Codes E-FLY M25pavlik1No ratings yet
- Systems Analysis and Control: Matthew M. PeetDocument25 pagesSystems Analysis and Control: Matthew M. PeetMehadi Alom ChoudhuryNo ratings yet
- Mw61a Ti All Sv6.01a enDocument11 pagesMw61a Ti All Sv6.01a enpradeepNo ratings yet
- Review of DG Definitions and Its ImpactDocument7 pagesReview of DG Definitions and Its ImpactDrVikas Singh BhadoriaNo ratings yet
- Bus-Ele-Tech-Lib-Electrical-Formulas 2Document1 pageBus-Ele-Tech-Lib-Electrical-Formulas 2balbeloanna7No ratings yet
- 0625 w16 QP 42Document20 pages0625 w16 QP 42yuke kristinaNo ratings yet
- Cat6 STP Network Cables: CT6B1, CT6B2, CT6B6Document1 pageCat6 STP Network Cables: CT6B1, CT6B2, CT6B6SatyaNo ratings yet
- Coipier Equivalency ListDocument446 pagesCoipier Equivalency Listpanait30No ratings yet
- DENT 3563: Telecommunication EngineeringDocument42 pagesDENT 3563: Telecommunication EngineeringSanji KarunaNo ratings yet
- Transistor Darlinton d1414Document3 pagesTransistor Darlinton d1414Maria MarcanoNo ratings yet
- Datasheet OCP8162ADocument12 pagesDatasheet OCP8162AjaimeNo ratings yet
- Squid VSM Ulf Manual A0Document34 pagesSquid VSM Ulf Manual A0Javier Andres Munoz Chaves100% (1)
- Leroy Somer Rating Chart 4607j - enDocument24 pagesLeroy Somer Rating Chart 4607j - enEmraan MughalNo ratings yet
- 74HC02 74HCT02: 1. General DescriptionDocument12 pages74HC02 74HCT02: 1. General Descriptionforeman pemudaNo ratings yet
- Computer Aided ManufacturingDocument3 pagesComputer Aided ManufacturingVivek PatelNo ratings yet